一种吊装系统及控制方法与流程
本发明涉及吊具领域,具体地涉及一种吊装系统及控制方法。
背景技术:
1、吊装系统是物料搬运的重要设备,通过安装在吊装线上的吊具吊装物料,移运至所需位置。常用的吊具在正常工作时,带有防脱落功能,不能自动脱钩。后来经过改进,出现了可以自动脱钩的吊具。但脱钩后的吊具需要手动复位,对于现在要求自动化、智能化程度高的连续性吊装作业,需要不时中断吊装作业,操作起来耗时耗力,十分不方便,自动化程度低,降低了整体的工作效率,并且存在一定的安全隐患。因此,有必要设计一种自动化程度高、能够自动脱钩和自动复位的吊装系统及控制方法。
技术实现思路
1、本发明的目的在于克服现有技术存在的缺点,提出设计一种吊装系统及控制方法,具有自动化程度高、自动脱钩和自动复位的功能。
2、本发明解决其技术问题所采取的技术方案是:
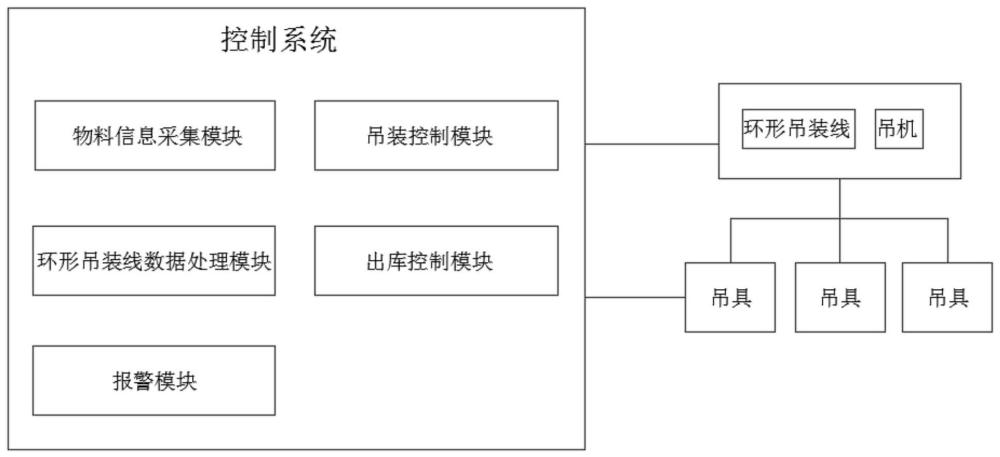
3、一种吊装系统,包括控制系统、环形吊装线和吊具,所述吊具通过吊绳悬挂在环形吊装线上,并通过吊机进行驱动;所述吊具和吊机均与控制系统连接,由控制系统控制动作,提高自动化操作;所述吊具具有自动脱钩和自动复位功能,包括连接板组件、吊钩组件、电动伸缩杆组件和锁钩装置;所述连接板组件包括第一侧板和第二侧板;所述吊钩组件和锁钩装置均设置于第一侧板和第二侧板之间;所述吊钩组件包括两个吊钩,两个吊钩分别通过铰轴固定于连接板组件上,吊钩能够绕铰轴自由旋转;所述电动伸缩杆组件用于上下驱动锁钩装置,锁钩装置下行使两个吊钩处于水平吊装状态,实现自动复位,锁钩装置上行脱离两个吊钩,吊钩在重力作用下,沿铰轴下行,实现自动脱钩。
4、进一步的,所述控制系统包括:
5、物料信息采集模块,用于采集物料入库信息,包括物料名称、入库时间、重量、尺寸等信息;
6、环形吊装线数据处理模块,用于获取物料信息采集模块采集的物料入库信息,并与环形吊装线所吊装的物料进行信息比对;
7、报警模块,用于获取环形吊装线数据处理模块的比对结果,如有误差,则进行报警,反之,则正常执行;
8、吊装控制模块,用于控制吊机和吊具吊装和运输物料;
9、出库控制模块,根据地仓罐所盛装物料的不同对出库物料的顺序进行调整,使最前端地仓罐对应最先出库的吨包,以及实现多种物料同时到位、同时拆包下料,顺序作用,不排不堵。
10、进一步的,所述吊机上安装有重量传感器,所述重量传感器与环形吊装线数据处理模块连接,通过重量传感器再次称量的物料重量信息传输至环形吊装线数据处理模块,由环形吊装线数据处理模块进行重量信息比对,从而再次核对物料种类。
11、进一步的,所述电动伸缩杆组件设置于第一侧板和第二侧板之间,其结构包括电机、减速机、螺纹套筒、伸缩杆;所述电机及减速机固定于连接板组件上,电机与所述吊装控制模块连接,由吊装控制模块控制动作,减速机的输出端固定有螺纹套筒,螺纹套筒内与伸缩杆螺纹连接,伸缩杆底部与锁钩装置连接。通过电机和减速机控制螺纹套筒的转速及转向,驱动伸缩杆上下移动,从而带动锁钩装置上下移动。
12、进一步的,所述锁钩装置包括上下一体式连接的锁扣部和推动部;所述推动部用于推动两个吊钩,使两个吊钩达到水平吊装状态;所述锁扣部用于保持两个吊钩的水平吊装状态。
13、进一步的,所述锁扣部为柱体结构,如圆柱、四棱柱等;所述推动部为圆弧尖端或锥体,如圆锥、四棱锥等。
14、进一步的,所述锁扣部上部开设凹槽,所述电动伸缩杆组件下端置于凹槽内且与凹槽底部或侧壁连接。
15、进一步的,所述推动部上设置有导向轴,所述第一侧板或/和第二侧板上开设导向腔,所述导向轴贯穿导向腔,沿导向腔上下滑动。
16、进一步的,所述吊钩组件处于脱钩状态时,两个吊钩的对立面相接触且接触面上方形成v型结构,两个吊钩处于水平吊装状态,两个吊钩的对立面分别与锁扣部的两侧接触,实现吊钩在脱钩状态与水平吊装状态之间的自动切换。
17、一种基于所述吊装系统的控制方法,包括以下步骤:
18、步骤1、首先通过物料信息采集模块采集物料入库信息,包括物料名称、入库时间、重量、尺寸等信息;
19、步骤2、判断吊具所处状态,如吊具处于脱钩状态,则对吊具进行复位,以用于物料吊装;通过吊装控制模块控制吊机和吊具吊装、运输物料;
20、步骤3、通过环形吊装线数据处理模块获取物料信息采集模块采集的物料入库信息,并与环形吊装线所吊装的物料进行信息比对,若比对结果有误差,则进行报警,反之,则正常执行;
21、步骤4、将物料移动至地仓罐上方,通过出库控制模块根据地仓罐所盛装物料的不同对出库物料的顺序进行调整,使最前端地仓罐对应最先出库的吨包,以及实现多种物料同时到位、同时拆包下料。
22、本发明的技术效果:
23、与现有技术相比,本发明的一种吊装系统,具有以下优点:
24、(1)吊装作业由控制系统控制,提高了自动化程度,提高了作业效率;
25、(2)将吊钩组件、电动伸缩杆组件和锁钩装置均设置于连接板组件之间,电动伸缩杆组件用于上下驱动锁钩装置,锁钩装置下行能够使两个吊钩处于水平吊装状态,实现自动复位,锁钩装置上行脱离两个吊钩,吊钩在重力作用下,沿铰轴下行,能够实现自动脱钩。
26、本发明在吊钩组件、电动伸缩杆组件和锁钩装置之间的协同配合下,实现了吊钩脱钩状态与水平吊装状态之间的自动切换,从而实现自动化、智能化程度高的连续性吊装作业。
技术特征:
1.一种吊装系统,其特征在于:包括控制系统、环形吊装线和吊具,所述吊具通过吊绳悬挂在环形吊装线上,并通过吊机进行驱动;所述吊具和吊机均与控制系统连接,由控制系统控制动作;所述吊具具有自动脱钩和自动复位功能,包括连接板组件(a)、吊钩组件(b)、电动伸缩杆组件(c)和锁钩装置(d);所述连接板组件(a)包括第一侧板(a1)和第二侧板(a2);所述吊钩组件(b)和锁钩装置(d)均设置于第一侧板(a1)和第二侧板(a2)之间;所述吊钩组件(b)包括两个吊钩,两个吊钩分别通过铰轴固定于连接板组件(a)上,吊钩能够绕铰轴自由旋转;所述电动伸缩杆组件(c)与控制系统连接,用于上下驱动锁钩装置(d),锁钩装置(d)下行使两个吊钩处于水平吊装状态,锁钩装置(d)上行脱离两个吊钩,吊钩在重力作用下,沿铰轴下行,实现自动脱钩。
2.根据权利要求1所述的吊装系统,其特征在于:所述控制系统包括:
3.根据权利要求2所述的吊装系统,其特征在于:所述吊机上安装有重量传感器,所述重量传感器与环形吊装线数据处理模块连接,通过重量传感器再次称量的物料重量信息传输至环形吊装线数据处理模块,由环形吊装线数据处理模块进行重量信息比对,从而再次核对物料种类。
4.根据权利要求1所述的吊装系统,其特征在于:所述电动伸缩杆组件(c)设置于第一侧板(a1)和第二侧板(a2)之间,其结构包括电机(c1)、减速机(c2)、螺纹套筒(c3)、伸缩杆(c4);所述电机(c1)及减速机(c2)固定于连接板组件(a)上,电机(c1)与所述吊装控制模块连接,由吊装控制模块控制动作,所述减速机(c2)的输出端固定有螺纹套筒(c3),螺纹套筒(c3)内与伸缩杆(c4)螺纹连接,伸缩杆(c4)底部与锁钩装置(d)连接。
5.根据权利要求1所述的吊装系统,其特征在于:所述锁钩装置(d)包括上下一体式连接的锁扣部(d1)和推动部(d2);所述推动部(d2)用于推动两个吊钩,使两个吊钩达到水平吊装状态;所述锁扣部(d1)用于保持两个吊钩的水平吊装状态。
6.根据权利要求5所述的吊装系统,其特征在于:所述锁扣部(d1)为柱体结构;所述推动部(d2)为圆弧尖端或锥体。
7.根据权利要求5所述的吊装系统,其特征在于:所述锁扣部(d1)上部开设凹槽(d3),所述电动伸缩杆组件(c)下端置于凹槽(d3)内且与凹槽(d3)底部或侧壁连接。
8.根据权利要求5所述的吊装系统,其特征在于:所述推动部(d2)上设置有导向轴(d4),所述第一侧板(a1)或/和第二侧板(a2)上开设导向腔(a3),所述导向轴(d4)贯穿导向腔(a3)。
9.根据权利要求5所述的吊装系统,其特征在于:所述吊钩组件(b)处于脱钩状态时,两个吊钩的对立面相接触且接触面上方形成v型结构,两个吊钩处于水平吊装状态,两个吊钩的对立面分别与锁扣部(d1)的两侧接触。
10.根据权利要求1-9任一项所述的吊装系统,其特征在于:所述吊装系统的控制方法,包括以下步骤:
技术总结
本发明涉及吊具领域,具体地涉及一种吊装系统及控制方法,所述系统包括控制系统、环形吊装线和吊具,所述吊具通过吊绳悬挂在环形吊装线上,并通过吊机进行驱动;吊具和吊机均与控制系统连接;吊具包括连接板组件、吊钩组件、电动伸缩杆组件和锁钩装置;所述吊钩组件和锁钩装置均设于连接板组件上;吊钩组件包括两个吊钩,两个吊钩分别通过铰轴固定于连接板组件上;电动伸缩杆组件用于上下驱动锁钩装置,锁钩装置下行使两个吊钩处于水平吊装状态,自动复位,锁钩装置上行脱离两个吊钩,吊钩在重力作用下,沿铰轴下行,自动脱钩。本发明实现了吊钩脱钩状态与水平吊装状态之间的自动切换,实现了自动化、智能化程度高的连续性吊装作业。
技术研发人员:鹿传世,吉正金,王凯,黄治湖,郝云霞,刘志桐,孙波,张虎山,崔小冬,刘存信,张翠翠,韩科行,陈瑞霞,张玉真,徐蒙蒙,刘东杰,冉云杰,程志远
受保护的技术使用者:山东万邦石油科技股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!