一种基于精准定位的自动化装盒机的制作方法
本发明涉及电子产品包装,具体涉及一种基于精准定位的自动化装盒机。
背景技术:
1、类似电子产品等体积较小的产品在制作完成之后,在从生产车间出货之前需要打包装箱,将大量的体积较小的电子产品规则的放置在盒子内,之后将装箱完毕的大量的电子产品批量的出货。根据出货需要,可能需要将电子产品分别打包装入到各种体积的盒子内,例如,当需要大量出货时需要用体积较大的盒子,此时需要将电子产品装入至体积较大的盒子内。或者,同类电子产品的不同型号的产品,体积也可能不相同,此时需要采用不同的体积的箱子或盒子进行包装。
2、用于将产品装入盒子内的装盒设备如果不能根据包装盒体积进行调整,则不能适应多种包装情况的包装需要。
技术实现思路
1、本发明的目的在于提供一种基于精准定位的自动化装盒机,以适应将体积小的产品装入至不同体积的包装盒内。
2、为实现上述目的,本发明的技术方案为:
3、第一方面,本申请提供一种基于精准定位的自动化装盒机,物品摆放盒和搬运结构,其特征在于:所述物品摆放盒包括盒子、阻挡架、拨动架和隔挡机;在所述盒子的一侧侧壁上平行的安装有滑轨和第一驱动组件;
4、所述阻挡架包括随动块,随动块扣接在主移动块的顶端,第一纵向推板安装在所述随动块的顶端,第一横向推板设置在第一纵向推板的端部,第一挡板固定在第一横向推板的下侧;
5、第一驱动组件包括直线电机和直线轨道;
6、第一驱动组件驱动主移动块沿着直线轨道向着靠近拨动架的方向移动时,带动第一挡板向盒子的内部移动,以调整盒子和第一挡板围成的容纳空间的大小;
7、所述搬运结构包括搬运框架,在所述搬运框架的两端分别安装有第一电机和第二直线位移传感器,在所述搬运框架内滑动设置有夹板;
8、所述隔挡机设置盒子的背离所述阻挡架的一端;在所述所述隔挡机上设置有第一直线位移传感器,所述直线位移传感器用于采集所述第一挡板和所述隔挡机的直线距离并发送至控制器;控制器根据接收到的直线距离发送控制命令至第一电机,由第一电机带动夹板在搬运框架沿着直线移动,以使得夹板直线距离和第二直线位移传感器直线距离相等,使夹板和搬运框架围成的抓取空间和盒子和第一挡板围成的容纳空间相对应。
9、第二方面,本申请提供一种基于精准定位的自动化装盒方法,采用第一方面所述基于精准定位的自动化装盒机,包括步骤:
10、将用于包装产品的产品包装盒放置在支撑架内;
11、根据产品包装盒的开口尺寸调整盒子的容纳空间,包括:
12、第三电机驱动隔板穿过传输结构和盒子之间的纵向缝隙,向上移动至盒子的入口处;
13、控制器发送命令至直线电机,直线电机驱动第一挡板在盒子内移动,第一直线位移传感器检测隔板和第一挡板直线距离,直至第一挡板、隔板和盒子围成的容纳空间和产品包装盒的端口的尺寸匹配;
14、控制器发送命令至第一电机,第一电机驱动夹板在搬运框架内移动,第二直线位移传感器检测和夹板直线距离,直至夹板和搬运框架围成的抓取空间和盒子和第一挡板围成的容纳空间相对应;
15、横向驱动电机驱动搬运结构横向移动至物品摆放盒的上方,第二电机驱动搬运框架向下运动,直至压力传感器检测到的压力至达到预设值,控制器发送停止命令完成物品抓取;
16、横向驱动电机驱动搬运结构横向运动至支撑架的上方将物品向下放置在产品包装盒内。
17、本发明技术方案的有益效果:
18、1.根据包装产品用的盒子的端口的尺寸对搬运框架的容纳空间、盒子进行调整,以利于搬运框架刚好可以将盒子内搬运至包装产品用的盒子内,搬运方便。并且,可以根据包装产品用的盒子的尺寸进行调整,可以适应多种产品包装盒对产品包装的需要。
技术特征:
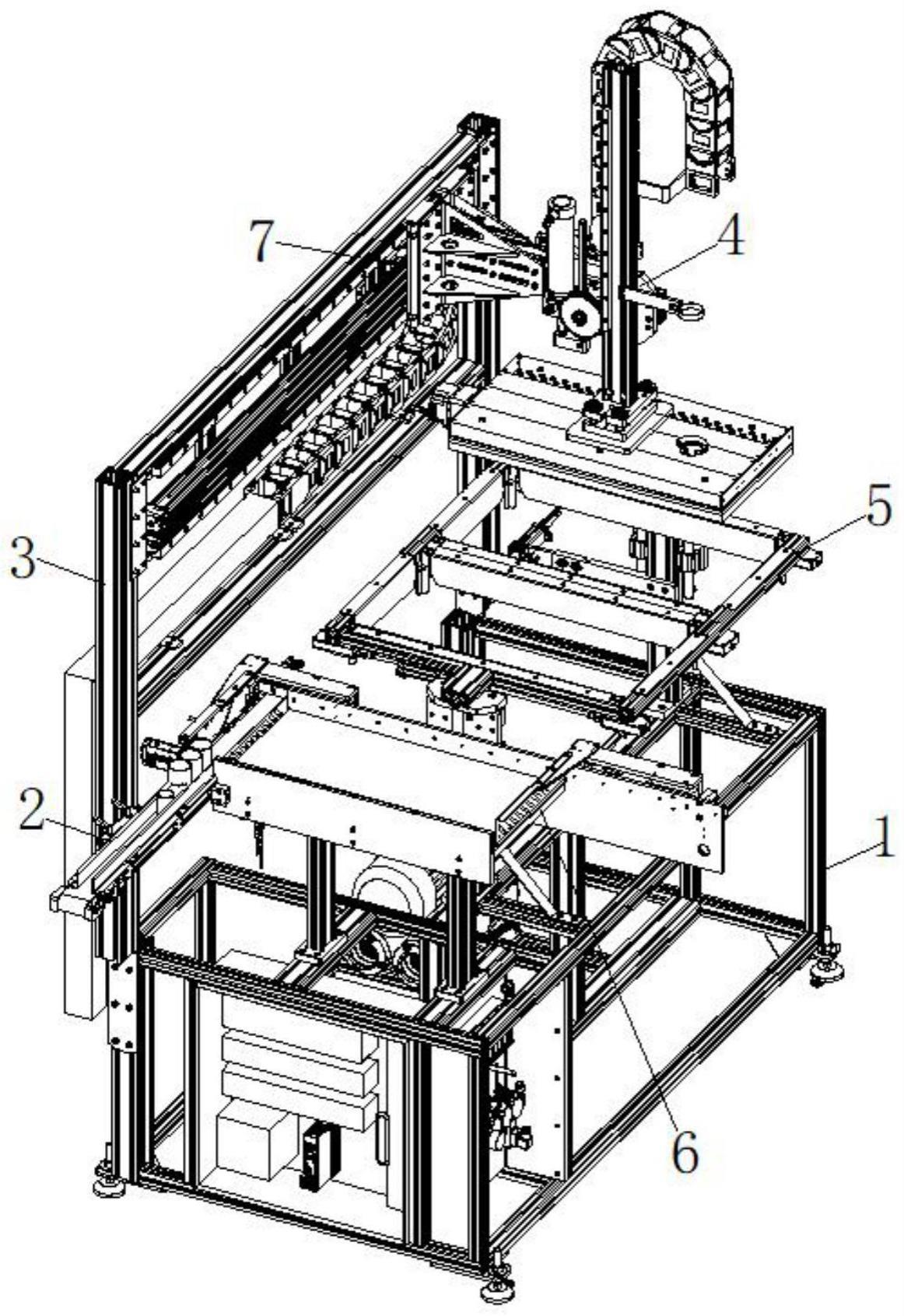
1.一种基于精准定位的自动化装盒机,物品摆放盒(6)和搬运结构,其特征在于:所述物品摆放盒(6)包括盒子(61)、阻挡架(62)、拨动架(63)和隔挡机(65);在所述盒子(61)的一侧侧壁上平行的安装有滑轨(611)和第一驱动组件(612);
2.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,还包括传输结构(2),传输结构(2)包括传输皮带(21),传输皮带(21)延伸至盒子(61)的物品输入一端的入口处;所述拨动架(63)安装在所述盒子的物品输入一端;
3.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,
4.根据权利要求3所述基于精准定位的自动化装盒机,其特征在于,
5.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,所述搬运结构(4)还包括侧板(411),在侧板(411)上沿着纵向安装有滑座(414)和第二电机(47),竖杆(49)滑动设置在滑座(414)的侧面,在竖杆(49)的下端固定有连接座(42),在所述竖杆(49)上树立的安装有第二齿条(48);第二电机(47)下端驱动连接板(44),连接板(44)带动其上方的第一齿条(46)沿着纵向移动,第一齿条(46)拨动和其相啮合的齿轮以带动第一齿轮(45)转动,第一齿轮(45)拨动第二齿条(48)纵向移动,以带动竖杆(49)纵向移动。
6.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,在所述搬运框架(41)的顶部的内侧面上设置有压力传感器。
7.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,还包括横向驱动电机(7),所述横向驱动电机(7)驱动横杆(410)横向移动,以带动搬运结构(4)在支撑架(5)和物品摆放盒(6)的上方往复移动,以搬运物品。
8.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,
9.根据权利要求1所述基于精准定位的自动化装盒机,其特征在于,
10.一种基于精准定位的自动化装盒方法,采用权利要求1至9任意一些所述基于精准定位的自动化装盒机,其特征在于,包括步骤:
技术总结
本发明公开一种基于精准定位的自动化装盒机,物品摆放盒和搬运结构,物品摆放盒包括盒子、阻挡架、拨动架和隔挡机;在盒子的一侧安装有滑轨和第一驱动组件;阻挡架包括随动块,随动块扣接在主移动块的顶端,第一纵向推板安装在随动块的顶端,第一横向推板设置在第一纵向推板的端部,第一挡板固定在第一横向推板的下侧;第一驱动组件包括直线电机和直线轨道;第一驱动组件驱动主移动块沿着直线轨道向着靠近拨动架的方向移动时,带动第一挡板向盒子的内部移动;搬运结构包括搬运框架,搬运框架的两端分别安装有第一电机和第二直线位移传感器,在搬运框架内滑动设置有夹板;通过调整使搬运框架和盒子适应多种尺寸的盒子包装需要。
技术研发人员:叶昌龙
受保护的技术使用者:深圳市兰凯自动化设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!