一种用于智能制造的有序搬运机器人的制作方法
本发明涉及机器人,具体为一种用于智能制造的有序搬运机器人。
背景技术:
1、搬运机器人是一种能够自主移动并搬运物品的机器人,通常用于自动化生产线、仓库、物流中心等场合。
2、专利cn116374529a公开了一种基于智能制造的物料搬运机器人,包括底盘机构、设置于底盘机构顶端的控制机构、以及设置于控制机构顶端、并可上下移动的移载机构;其中,所述底盘机构用于带动机器人整体进行移动;所述控制机构为控制器件及各种传感器的安装平台,所述控制机构用于控制底盘机构按照指定路径进行移动,本发明通过在每个移动轮上均设置一个减震机构,减小移动机器人在行驶过程中的振动,为传感器件提供稳定可靠的工作环境,并通过设计无线遥控模块,实现对机器人的远程手动控制,增加触摸屏显示的内容和可操作的功能,改善人机交互体验,提高运动控制的精度,从而优化机器人加减速运动曲线。
3、现有的搬运机器人通常借助于可升降的夹持机构实现物品的搬运作业,针对于批量产品的搬运需要借助于分离式的物品放置容器,如托盘机器人通过对放置容器进行托撑而实现批量产品的移动,而托盘机器人针对于批量产品只能实现移动,无法进行上卸料作业,还需要借助于上下料机器人协同作业,才能完成批量产品的搬运作业,如专利cn116374529a公开了一种基于智能制造的物料搬运机器人,通过于底盘机构顶部设置移载机构而可实现批量产品的运输,移栽机构类似于安装于底盘机构上的输送结构,针对于上料作业或后续与移栽机构相对接的不同规格的输送带的卸料作业时,移栽机构无法做到有序上料和卸料,还需通过人工进行辅助操作,为此,我们设计出一种用于智能制造的有序搬运机器人,来解决上述问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于智能制造的有序搬运机器人,解决了现有针对于批量产品的搬运机器人无法做到有序上料和卸料的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于智能制造的有序搬运机器人,包括移动底座和机器人主体,所述机器人主体通过四个呈矩形阵列分布且均纵向架设的阻尼器嵌装于移动底座内,
3、所述机器人主体包括:
4、呈四面围合的方体架构的柜体,用于主体支撑和提供安装平台,
5、固定安装于柜体顶部的放置台,用于小批量产品的暂时存储收纳,
6、设置于柜体前部的搬运机构,用于单个产品的上料,
7、置于柜体内部的控制组件,用于控制机器人主体的动作执行以及移动底座的路径移动,
8、所述柜体的前侧面设有供机器人主体采样的视觉窗口,所述柜体的左、右两侧面均铰接有检修门。
9、优选的,所述放置台包括供产品有序摆放的输料板、防止产品掉落的两个固定挡板和设于其中一个固定挡板外侧的交互面板,以及均通过升降气缸驱动的第一升降挡板和第二升降挡板,两个所述固定挡板均沿输料板的长度方向架设并分别位于输料板的左、右两侧,所述第一升降挡板和第二升降挡板均沿输料板的宽度方向架设并分别位于输料板的后部和前部,所述第一升降挡板、第二升降挡板和两个固定挡板于输料板上围合形成供小批量产品容置的收纳空间。
10、优选的,所述搬运机构包括升降滑台和夹持组件,所述升降滑台包括丝杆、滑杆和滑座,所述柜体前部的左、右两侧面均固定安装有沿倾斜方向架设的固定台,所述丝杆和滑杆分别转动安装于两个固定台内,所述丝杆的轴线和滑杆的轴线处于同一平面内,且其中一个固定台的顶部固定安装有供丝杆驱动的伺服马达,所述丝杆和滑杆的外部均套装有滑套,所述滑座沿竖直平面架设并固定连接于两个滑套上,所述滑座的左侧设有供产品穿过的开口槽,所述夹持组件安装于开口槽处,所述开口槽的顶部固定安装有沿水平面分布的限位板并于限位板的前部贯穿安装有第一感应探头。
11、优选的,所述输料板包括台板和嵌装于台板底部的若干个纵向输料辊组和若干个横向输料辊组,所述台板的底面垂直向下延伸有供若干个纵向输料辊组和若干个横向输料辊组转动安装的矩形框架,若干个纵向输料辊组均沿台板的宽度方向架设且其轴线均处于同一水平面内,若干个所述纵向输料辊组通过第一链条同步传动并由第一减速电机驱动,若干个所述横向输料辊组均沿台板的长度方向架设且其轴线均处于同一水平面内,若干个所述横向输料辊组通过第二链条同步传动并由第二减速电机驱动,所述纵向输料辊组和横向输料辊组结构相同,所述纵向输料辊组由转轴和固定套装于转轴外部的若干个滚辊组成,所述转轴的一端固定安装有供链条啮合传动的链轮。
12、优选的,所述第一升降挡板的顶面沿其长度方向倾斜设置,所述第二升降挡板的顶面沿水平面分布,两个所述升降气缸均通过l型支座分别固定连接于柜体的前、后两内侧壁且两个升降气缸均沿竖直方向分布,所述第一升降挡板和第二升降挡板的两边侧均架设有沿竖直方向分布的固定板,四个所述固定板的内侧面均固定连接有沿其长度方向分布的第一导条,所述第一升降挡板和第二升降挡板的两边侧均开设有与第一导条滑动适配的导槽。
13、优选的,所述夹持组件包括分设于开口槽左、右两侧的固定座和活动座,以及供活动座移动的夹持气缸,所述固定座固定连接于滑座上,所述滑座的右侧设有两个供活动座导向限位的第二导条,所述夹持气缸横向架设于滑座上且其输出端与活动座固定连接,所述固定座和活动座上均安装有第二感应探头和气动柔性夹头。
14、优选的,所述控制组件包括支撑板、控制主板、通讯模块和深度相机,所述控制主板和通讯模块均固定安装于支撑板上,所述深度相机通过云台架设于支撑板上,且深度相机的高度与视觉窗口相适配。
15、优选的,移动底座包括船型箱和转动安装于船型箱两侧的四个麦轮组件,以及分别安装于船型箱周向侧壁底部的四个激光测距探头,所述船型箱的内底面固定安装有四个驱动电机,四个所述麦轮组件分别与四个驱动电机的输出端固定连接。
16、优选的,所述麦轮组件包括麦克纳姆轮和轴杆,以及供两者装配的两个半圆安装片,所述轴杆的外端设有定位端板,两个所述半圆安装片拼合呈圆形板结构并于其内部形成供定位端板容置的装配腔。
17、有益效果
18、本发明提供了一种用于智能制造的有序搬运机器人。与现有技术相比具备以下有益效果:
19、该用于智能制造的搬运机器人,通过于移动底座上方架设有放置台,可为批量产品提供平稳的托撑结构,配合输料板可于两个固定挡板、第一升降挡板和第二升降挡板所围合的容纳空间内实现小批量产品的平稳放置和收纳,同时配合输料板,在无需人工辅助的情况下,即可实现批量产品的有序搬运和卸料作业。
技术特征:
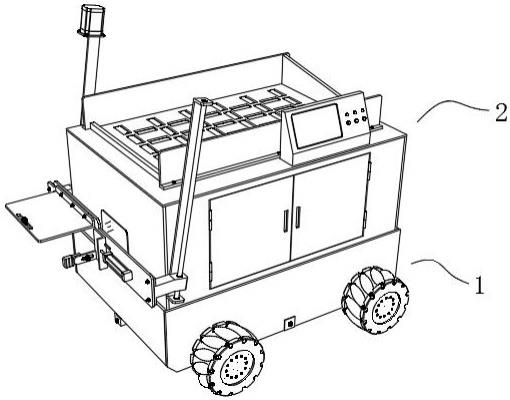
1.一种用于智能制造的有序搬运机器人,包括移动底座(1)和机器人主体(2),所述机器人主体(2)通过四个呈矩形阵列分布且均纵向架设的阻尼器(3)嵌装于移动底座(1)内;
2.根据权利要求1所述的一种用于智能制造的有序搬运机器人,其特征在于:所述放置台(5)包括供产品有序摆放的输料板(10)、防止产品掉落的两个固定挡板(11)和设于其中一个固定挡板(11)外侧的交互面板(12),以及均通过升降气缸(13)驱动的第一升降挡板(14)和第二升降挡板(15),两个所述固定挡板(11)均沿输料板(10)的长度方向架设并分别位于输料板(10)的左、右两侧,所述第一升降挡板(14)和第二升降挡板(15)均沿输料板(10)的宽度方向架设并分别位于输料板(10)的后部和前部,所述第一升降挡板(14)、第二升降挡板(15)和两个固定挡板(11)于输料板(10)上围合形成供小批量产品容置的收纳空间。
3.根据权利要求1所述的一种用于智能制造的有序搬运机器人,其特征在于:所述搬运机构(6)包括升降滑台(16)和夹持组件(17),所述升降滑台(16)包括丝杆(18)、滑杆(19)和滑座(20),所述柜体(4)前部的左、右两侧面均固定安装有沿倾斜方向架设的固定台(21),所述丝杆(18)和滑杆(19)分别转动安装于两个固定台(21)内,所述丝杆(18)的轴线和滑杆(19)的轴线处于同一平面内,且其中一个固定台(21)的顶部固定安装有供丝杆(18)驱动的伺服马达(22),所述丝杆(18)和滑杆(19)的外部均套装有滑套(23),所述滑座(20)沿竖直平面架设并固定连接于两个滑套(23)上,所述滑座(20)的左侧设有供产品穿过的开口槽(24),所述夹持组件(17)安装于开口槽(24)处,所述开口槽(24)的顶部固定安装有沿水平面分布的限位板(25)并于限位板(25)的前部贯穿安装有第一感应探头(26)。
4.根据权利要求2所述的一种用于智能制造的有序搬运机器人,其特征在于:所述输料板(10)包括台板(27)和嵌装于台板(27)底部的若干个纵向输料辊组(28)和若干个横向输料辊组(29),所述台板(27)的底面垂直向下延伸有供若干个纵向输料辊组(28)和若干个横向输料辊组(29)转动安装的矩形框架(30),若干个纵向输料辊组(28)均沿台板(27)的宽度方向架设且其轴线均处于同一水平面内,若干个所述纵向输料辊组(28)通过第一链条(31)同步传动并由第一减速电机(32)驱动,若干个所述横向输料辊组(29)均沿台板(27)的长度方向架设且其轴线均处于同一水平面内,若干个所述横向输料辊组(29)通过第二链条(33)同步传动并由第二减速电机(34)驱动,所述纵向输料辊组(28)和横向输料辊组(29)结构相同,所述纵向输料辊组(28)由转轴(35)和固定套装于转轴(35)外部的若干个滚辊(36)组成,所述转轴(35)的一端固定安装有供链条啮合传动的链轮(37)。
5.根据权利要求2所述的一种用于智能制造的有序搬运机器人,其特征在于:所述第一升降挡板(14)的顶面沿其长度方向倾斜设置,所述第二升降挡板(15)的顶面沿水平面分布,两个所述升降气缸(13)均通过l型支座(38)分别固定连接于柜体(4)的前、后两内侧壁且两个升降气缸(13)均沿竖直方向分布,所述第一升降挡板(14)和第二升降挡板(15)的两边侧均架设有沿竖直方向分布的固定板(39),四个所述固定板(39)的内侧面均固定连接有沿其长度方向分布的第一导条(40),所述第一升降挡板(14)和第二升降挡板(15)的两边侧均开设有与第一导条(40)滑动适配的导槽(41)。
6.根据权利要求3所述的一种用于智能制造的有序搬运机器人,其特征在于:所述夹持组件(17)包括分设于开口槽(24)左、右两侧的固定座(42)和活动座(43),以及供活动座(43)移动的夹持气缸(44),所述固定座(42)固定连接于滑座(20)上,所述滑座(20)的右侧设有两个供活动座(43)导向限位的第二导条(45),所述夹持气缸(44)横向架设于滑座(20)上且其输出端与活动座(43)固定连接,所述固定座(42)和活动座(43)上均安装有第二感应探头(46)和气动柔性夹头(47)。
7.根据权利要求1所述的一种用于智能制造的有序搬运机器人,其特征在于:所述控制组件(7)包括支撑板(48)、控制主板(49)、通讯模块(50)和深度相机(51),所述控制主板(49)和通讯模块(50)均固定安装于支撑板(48)上,所述深度相机(51)通过云台(52)架设于支撑板(48)上,且深度相机(51)的高度与视觉窗口(8)相适配。
8.根据权利要求1所述的一种用于智能制造的有序搬运机器人,其特征在于:移动底座(1)包括船型箱(53)和转动安装于船型箱(53)两侧的四个麦轮组件(54),以及分别安装于船型箱(53)周向侧壁底部的四个激光测距探头(55),所述船型箱(53)的内底面固定安装有四个驱动电机(56),四个所述麦轮组件(54)分别与四个驱动电机(56)的输出端固定连接。
9.根据权利要求8所述的一种用于智能制造的有序搬运机器人,其特征在于:所述麦轮组件(54)包括麦克纳姆轮(57)和轴杆(58),以及供两者装配的两个半圆安装片(59),所述轴杆(58)的外端设有定位端板(60),两个所述半圆安装片(59)拼合呈圆形板结构并于其内部形成供定位端板(60)容置的装配腔。
技术总结
本发明公开了一种用于智能制造的有序搬运机器人,包括移动底座和机器人主体,所述机器人主体通过四个呈矩形阵列分布且均纵向架设的阻尼器嵌装于移动底座内,所述机器人主体包括:呈四面围合的方体架构的柜体,固定安装于柜体顶部的放置台,设置于柜体前部的搬运机构,置于柜体内部的控制组件,本发明涉及机器人技术领域。该用于智能制造的搬运机器人,通过于移动底座上方架设有放置台,可为批量产品提供平稳的托撑结构,配合输料板可于两个固定挡板、第一升降挡板和第二升降挡板所围合的容纳空间内实现小批量产品的平稳放置和收纳,同时配合输料板,在无需人工辅助的情况下,即可实现批量产品的有序搬运和卸料作业。
技术研发人员:于文军
受保护的技术使用者:沥拓科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!