玻璃搬运机器人
本发明涉及玻璃搬运,具体为玻璃搬运机器人。
背景技术:
1、随着社会的发展,玻璃是生活中不可或缺的材料,家具、楼房、电器都离不开玻璃,在对玻璃进行加工时,为了降低人工的工作强度,提高工作效率,通常采用搬运机器人对玻璃进行运输。
2、中国专利号为cn106241369b的发明公开一种玻璃搬运机器人,包括底盘、液压缸支座、液压缸、压杆、第一步进电机、杆架、控制系统、六个第一轮子、六个第二轮子、六个第二步进电机、六个第一小齿轮、六个第一大齿轮、六个电机支座、六个支杆、六个轴、六个探测器、六个舵机支架、六个第一舵机、六个第二小齿轮、六个第二大齿轮、第三步进电机、第三小齿轮、旋转支座、第三大齿轮、吸盘支座、四个吸盘支架、吸盘、距离探测器、真空泵、半齿轮、电机齿轮、伺服电机,其特征在于:所述的液压缸安装在液压缸支座上面;所述的压杆安装在液压缸里面;针对上述问题,本发明提供一种玻璃搬运的机器,其通过六个组合轮子可以向任意方向行走,通过吸盘可以吸起玻璃。
3、但是该机器人只能对玻璃的中间部分进行吸附,若玻璃尺寸过大时,则玻璃在运输的过程中容易发生掉落的情况,且玻璃上的杂质会影响吸盘吸附的效果,因而需要研发一种能够稳定搬运玻璃,且玻璃不易掉落的搬运机器人。
技术实现思路
1、针对现有技术的不足,本发明提供了玻璃搬运机器人,解决了目前机器人只能对玻璃的中间部分进行吸附,若玻璃尺寸过大时,则玻璃在运输的过程中容易发生掉落的情况,且玻璃上的杂质会影响吸盘吸附效果的问题。
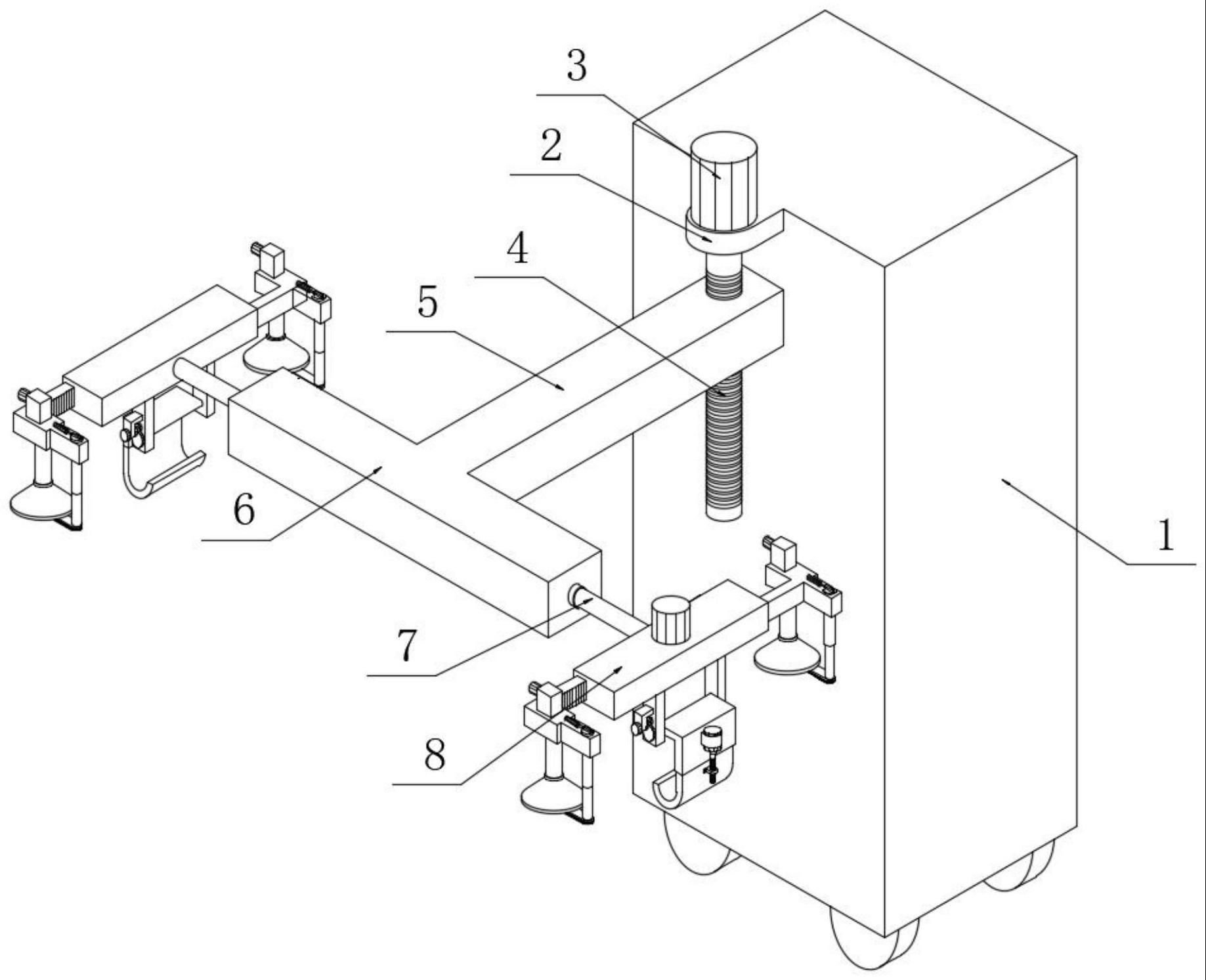
2、为实现以上目的,本发明通过以下技术方案予以实现:玻璃搬运机器人,包括机身,所述机身的上方一侧设置有限位座,限位座的上部安装有第一伺服电机,第一伺服电机的输出轴连接有第一螺杆,第一螺杆的外部通过螺纹旋接有支撑梁,支撑梁的一端设置有空心梁,空心梁的内部安装有两个第一液压缸,两个第一液压缸的输出轴均连接有玻璃吸附件。
3、所述玻璃吸附件包括有中空支座,中空支座的两侧均滑动穿插有齿条,两个齿条相背的一端均设置有限位块,限位块的上部设置有真空泵,真空泵的输出端连接有吸附管,吸附管的下端连接有真空吸盘,且限位块的前侧设置有吸附辅助件,中空支座的底部设置有吸附防脱件。
4、进一步的,所述中空支座的上部中间位置处安装有第二伺服电机,第二伺服电机的输出轴位于中空支座的内部位置处连接有驱动齿轮,驱动齿轮分别与两个齿条相啮合。
5、进一步的,所述吸附辅助件包括设置于限位块前侧的固定块,固定块的底部转动穿插有限位筒,限位筒的内部滑动穿插有限位轴,限位轴的上端与限位筒的内部顶侧之间通过弹簧固定连接,且限位轴的下端连接有刮板,刮板的下部通过魔术贴粘接有清洁布。
6、进一步的,所述固定块的上部转动连接有转盘,限位筒的上端连接于转盘的下侧中部,固定块的另一侧上部安装有第二液压缸,第二液压缸的输出轴铰接有调节杆,调节杆的另一端铰接于转盘的上部边缘处。
7、进一步的,所述弹簧处于自然状态时,刮板位于真空吸盘的下方。
8、进一步的,所述吸附防脱件包括设置于中空支座下部的两个限位条,两个限位条的下侧之间转动连接有l形板,l形板的内部为中空结构,且l形板的下侧滑动穿插有导向板,导向板的下侧设置有弯钩板。
9、进一步的,其中一个所述限位条的下端一侧转动安装有齿轮盘,齿轮盘的一端与l形板的一侧相连接,且限位条的一侧位于齿轮盘的上方位置处安装有第四伺服电机,第四伺服电机的输出轴连接有与齿轮盘相适配的主齿轮,主齿轮与齿轮盘之间相啮合。
10、进一步的,所述l形板的前侧安装有第三伺服电机,导向板的下方前侧设置有螺纹块,第三伺服电机的输出轴连接有第二螺杆,螺纹块通过螺纹旋接在第二螺杆的外部。
11、有益效果
12、本发明提供了玻璃搬运机器人,与现有技术相比具备以下有益效果:
13、1、该玻璃搬运机器人,在对玻璃进行搬运吸附时,能够调整各个真空吸盘之间的间距,从而能够对不同尺寸的玻璃进行吸附搬运工作,同时能够保证搬运时的稳定性,提高了其搬运适用范围性。
14、2、该玻璃搬运机器人,在对玻璃吸附搬运之前,能够对真空吸盘下方的玻璃进行擦拭清洁工作,保证真空吸盘能够稳定的吸附在玻璃上,从而能够顺利的将玻璃给吸附起来。
15、3、该玻璃搬运机器人,通过设置吸附防脱件,当将玻璃给吸附起来后,能够将玻璃的两侧底部给托起来,使玻璃不会发生掉落情况,即使玻璃从真空吸盘上脱离后也不会掉落到地面上,对玻璃起到了保障的作用,且在第三伺服电机的工作下,能够调整弯钩板的位置,进而能够对不同厚度的玻璃进行托举支撑工作。
技术特征:
1.玻璃搬运机器人,包括机身(1),其特征在于:所述机身(1)的上方一侧设置有限位座(2),限位座(2)的上部安装有第一伺服电机(3),第一伺服电机(3)的输出轴连接有第一螺杆(4),第一螺杆(4)的外部通过螺纹旋接有支撑梁(5),支撑梁(5)的一端设置有空心梁(6),空心梁(6)的内部安装有两个第一液压缸(7),两个第一液压缸(7)的输出轴均连接有玻璃吸附件(8);
2.根据权利要求1所述的玻璃搬运机器人,其特征在于:所述中空支座(81)的上部中间位置处安装有第二伺服电机(8101),第二伺服电机(8101)的输出轴位于中空支座(81)的内部位置处连接有驱动齿轮(8102),驱动齿轮(8102)分别与两个齿条(82)相啮合。
3.根据权利要求1所述的玻璃搬运机器人,其特征在于:所述吸附辅助件(87)包括设置于限位块(83)前侧的固定块(871),固定块(871)的底部转动穿插有限位筒(872),限位筒(872)的内部滑动穿插有限位轴(873),限位轴(873)的上端与限位筒(872)的内部顶侧之间通过弹簧(876)固定连接,且限位轴(873)的下端连接有刮板(874),刮板(874)的下部通过魔术贴粘接有清洁布(875)。
4.根据权利要求3所述的玻璃搬运机器人,其特征在于:所述固定块(871)的上部转动连接有转盘(877),限位筒(872)的上端连接于转盘(877)的下侧中部,固定块(871)的另一侧上部安装有第二液压缸(878),第二液压缸(878)的输出轴铰接有调节杆(879),调节杆(879)的另一端铰接于转盘(877)的上部边缘处。
5.根据权利要求3所述的玻璃搬运机器人,其特征在于:所述弹簧(876)处于自然状态时,刮板(874)位于真空吸盘(86)的下方。
6.根据权利要求1所述的玻璃搬运机器人,其特征在于:所述吸附防脱件(88)包括设置于中空支座(81)下部的两个限位条(881),两个限位条(881)的下侧之间转动连接有l形板(882),l形板(882)的内部为中空结构,且l形板(882)的下侧滑动穿插有导向板(883),导向板(883)的下侧设置有弯钩板(884)。
7.根据权利要求6所述的玻璃搬运机器人,其特征在于:其中一个所述限位条(881)的下端一侧转动安装有齿轮盘(888),齿轮盘(888)的一端与l形板(882)的一侧相连接,且限位条(881)的一侧位于齿轮盘(888)的上方位置处安装有第四伺服电机(889),第四伺服电机(889)的输出轴连接有与齿轮盘(888)相适配的主齿轮(8810),主齿轮(8810)与齿轮盘(888)之间相啮合。
8.根据权利要求6所述的玻璃搬运机器人,其特征在于:所述l形板(882)的前侧安装有第三伺服电机(885),导向板(883)的下方前侧设置有螺纹块(887),第三伺服电机(885)的输出轴连接有第二螺杆(886),螺纹块(887)通过螺纹旋接在第二螺杆(886)的外部。
技术总结
本发明公开了玻璃搬运机器人,本发明涉及玻璃搬运技术领域,包括机身,所述机身的上方一侧设置有限位座,限位座的上部安装有第一伺服电机,第一伺服电机的输出轴连接有第一螺杆,第一螺杆的外部通过螺纹旋接有支撑梁,支撑梁的一端设置有空心梁,空心梁的内部安装有两个第一液压缸,两个第一液压缸的输出轴均连接有玻璃吸附件。该玻璃搬运机器人,在对玻璃进行搬运吸附时,能够调整各个真空吸盘之间的间距,从而能够对不同尺寸的玻璃进行吸附搬运工作,同时能够保证搬运时的稳定性,提高了其搬运适用范围性,在对玻璃吸附搬运之前,能够对真空吸盘下方的玻璃进行擦拭清洁工作,保证真空吸盘能够稳定的吸附在玻璃上。
技术研发人员:司致丹
受保护的技术使用者:淄博职业学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!