高效工业机器人气动机械手系统的制作方法
本发明涉及码垛机器人,具体为一种高效工业机器人气动机械手系统。
背景技术:
1、码垛是一种将工件稳定堆放到用于运输的托盘上方的操作,而码垛机器人则是采用了机械与计算机的相互配合可以自动对工件进行码垛的操作,而抓手机构则是码垛机器上重要的组成部分,相当于人类的手部用于对工件进行抓取松开,其优势可代替工人的手部对一些手部不便于抓取的工件进行抓取,使用范围广同时操作也简单。
2、现阶段的高效工业机器人气动机械手系统使用时抓块会支架接触工件,使用过程中抓手结构的抓块长度不可调节,不便于根据实际需求对抓块的长度作出调节,抓取不同的工件时易产生不便,所以现提供一种高效工业机器人气动机械手系统,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种高效工业机器人气动机械手系统,以解决上述背景技术中提出的不便于根据实际需求对抓块的长度作出调节问题。
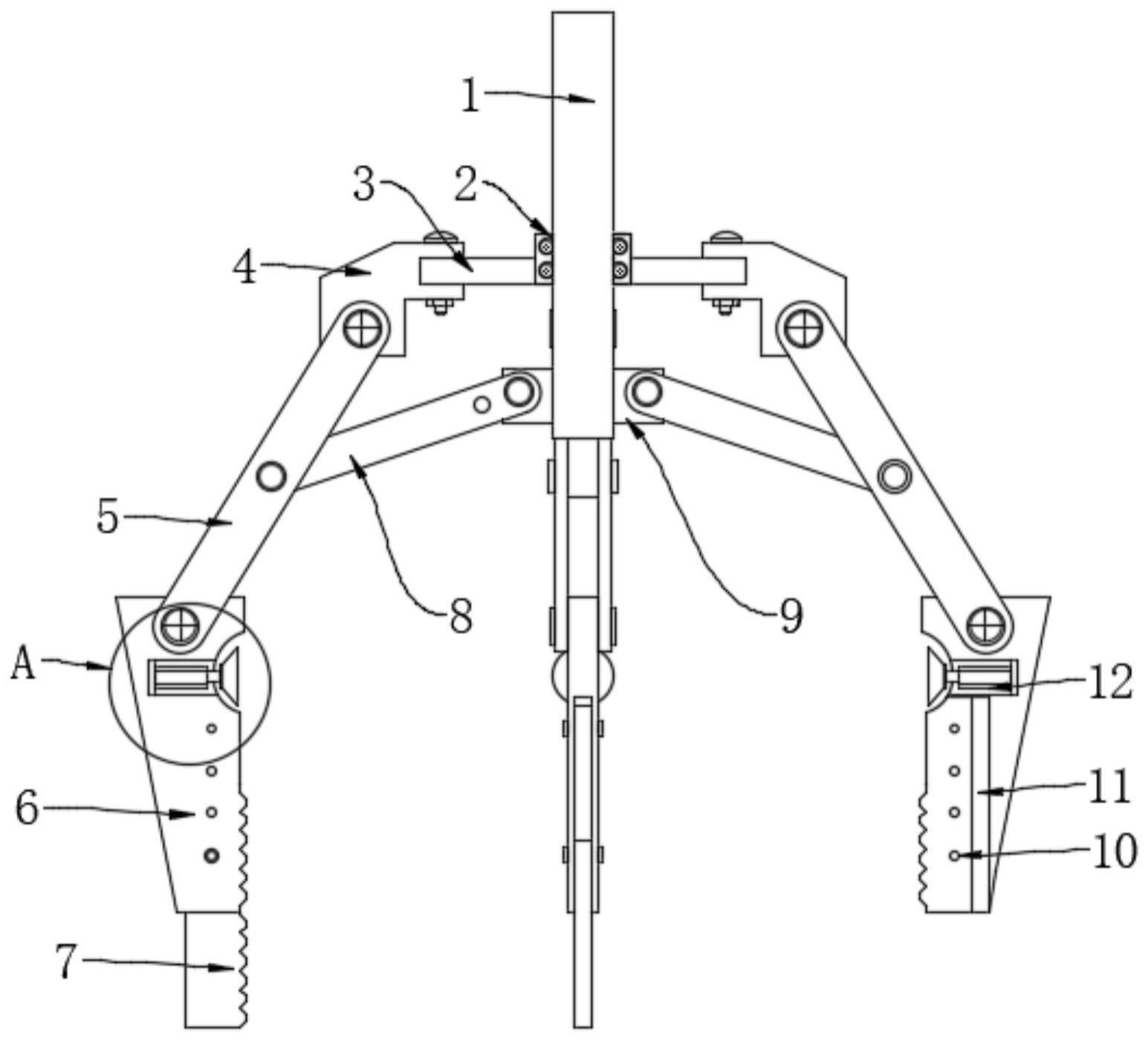
2、为实现上述目的,本发明提供如下技术方案:一种高效工业机器人气动机械手系统,包括推动杆,所述推动杆的外侧壁活动设置有固定座,所述固定座的外侧壁固定有固定片,所述固定片的两侧和两端均安装有连接座,且连接座的底端均铰接安装有抓杆,所述抓杆的底端均安装有抓块,所述抓杆的中间位置处均铰接安装有铰接杆,所述铰接杆的一端均铰接安装有安装块,且安装块的一侧均与推动杆外侧壁的底端固定,所述抓块内部的两端均设置有孔体,且孔体的内部设置有固定螺栓,所述抓块的内部均安装有延长块。
3、优选的,所述抓块内部的一侧均固定有导向座,所述导向座与延长块之间相配适。
4、优选的,所述孔体设置有若干个,若干个所述孔体在抓块内部的两端呈等间距分布。
5、优选的,所述抓块设置有四组,且抓块内部的一侧均呈锯齿状设计。
6、优选的,所述固定座的内部均设置有滚动槽,且滚动槽的内部均活动安装有滚动珠。
7、优选的,所述滚动珠设置有若干个,若干个所述滚动珠在固定座的内部呈环形等间距分布。
8、优选的,所述抓块内部的顶端均安装有伸缩气缸,且伸缩气缸的一侧均安装有固定吸盘。
9、优选的,所述固定吸盘设置有四组,四组所述固定吸盘关于固定片呈环形分布。
10、与现有技术相比,本发明的有益效果是:该高效工业机器人气动机械手系统不仅实现了抓块的长度可调,便于对不同长度的工件进行抓取,实现了推动杆可顺畅的推动抓块展开,使用效果更好,而且实现了抓手结构中的抓块对工件的抓取稳定性更强;
11、(1)通过设置有延长块、导向座、孔体和固定螺栓等组件,抓块对工件进行抓取的过程中,会遇到不同长度的工件,通过在抓块的内部活动设置有延长块可在使用时根据实际需求抽动延长块使其与抓块一起组装到相应的长度,后对工件进行抓取,实现了该抓手结构的抓块可调节,适配性更强;
12、(2)通过设置有固定座、滚动珠和滚动槽等组件,推动杆推动抓块展开对工件进行抓取时,推动杆会在固定座的内侧壁上下滑动,通过在固定座的内部安装有环形等间距分布的滚动珠,使得该推动杆在固定座内部的滑动摩擦力改变为滚动摩擦力,从而使得推动杆推动抓块的展开更加顺畅,不易产生卡顿,使用效果更好;
13、(3)通过设置有伸缩气缸和固定吸盘等组件,该抓手结构使用时抓手结构上的抓块会贴合到工件的外侧壁对工件进行抓取,同时因在抓块的内部采用伸缩气缸和固定吸盘,使得抓块对工件的抓取更加稳定,从而使得该抓手结构对工件的抓取更加稳定,稳定性更好。
技术特征:
1.一种高效工业机器人气动机械手系统,包括推动杆(1),其特征在于:所述推动杆(1)的外侧壁活动设置有固定座(2),所述固定座(2)的外侧壁固定有固定片(3),所述固定片(3)的两侧和两端均安装有连接座(4),且连接座(4)的底端均铰接安装有抓杆(5),所述抓杆(5)的底端均安装有抓块(6),所述抓杆(5)的中间位置处均铰接安装有铰接杆(8),所述铰接杆(8)的一端均铰接安装有安装块(9),且安装块(9)的一侧均与推动杆(1)外侧壁的底端固定,所述抓块(6)内部的两端均设置有孔体(10),且孔体(10)的内部设置有固定螺栓(16),所述抓块(6)的内部均安装有延长块(7)。
2.根据权利要求1所述的一种高效工业机器人气动机械手系统,其特征在于:所述抓块(6)内部的一侧均固定有导向座(11),所述导向座(11)与延长块(7)之间相配适。
3.根据权利要求1所述的一种高效工业机器人气动机械手系统,其特征在于:所述孔体(10)设置有若干个,若干个所述孔体(10)在抓块(6)内部的两端呈等间距分布。
4.根据权利要求1所述的一种高效工业机器人气动机械手系统,其特征在于:所述抓块(6)设置有四组,且抓块(6)内部的一侧均呈锯齿状设计。
5.根据权利要求4所述的一种高效工业机器人气动机械手系统,其特征在于:所述固定座(2)的内部均设置有滚动槽(14),且滚动槽(14)的内部均活动安装有滚动珠(13)。
6.根据权利要求5所述的一种高效工业机器人气动机械手系统,其特征在于:所述滚动珠(13)设置有若干个,若干个所述滚动珠(13)在固定座(2)的内部呈环形等间距分布。
7.根据权利要求1所述的一种高效工业机器人气动机械手系统,其特征在于:所述抓块(6)内部的顶端均安装有伸缩气缸(12),且伸缩气缸(12)的一侧均安装有固定吸盘(15)。
8.根据权利要求7所述的一种高效工业机器人气动机械手系统,其特征在于:所述固定吸盘(15)设置有四组,四组所述固定吸盘(15)关于固定片(3)呈环形分布。
技术总结
本发明公开了一种高效工业机器人气动机械手系统,包括推动杆,所述推动杆的外侧壁活动设置有固定座,所述固定座的外侧壁固定有固定片,所述固定片的两侧和两端均安装有连接座,且连接座的底端均铰接安装有抓杆,所述抓杆的底端均安装有抓块,且孔体的内部设置有固定螺栓,所述抓块的内部均安装有延长块。该抓手结构通过设置有延长块、导向座、孔体和固定螺栓等组件,抓块对工件进行抓取的过程中,会遇到不同长度的工件,通过在抓块的内部活动设置有延长块可在使用时根据实际需求抽动延长块使其与抓块一起组装到相应的长度,后对工件进行抓取,实现了该抓手结构的抓块可调节,适配性更强。
技术研发人员:刘庆生,杨川
受保护的技术使用者:成都海科工控设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!