一种行走式高空作业平台的制作方法
本发明涉及高空作业领域,尤其涉及一种行走式高空作业平台。
背景技术:
1、高空作业平台是服务于各个行业高空作业、设备安装、检修等可移动性高空作业的产品。比如说申请号为cn201410465457.x的专利中公开了一种高空作业平台,该高空作业平台能够实现行走、升降以及上下的变幅,但是该专利还存在着如下弊端:1)当在水平方向上遇到障碍物的时候,该高空作业平台往往无法将其上的作业平台送至作业点;2)该高空作业平台在作业的过程中,作业平台往往会受到影响,无法始终保持的水平状态;3)该高空作业平台中的作业平台是直接与第一连接臂、第二连接臂铰接在一起的,就算安装了称重传感器也无法对作业平台进行精准称重,而作业平台的精准称重对于保障作业人员的安全是必不可少的。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明目的在于提供一种行走式高空作业平台,解决了现有技术存在的问题,该作业平台即使在遇到障碍物的情况下也能将作业平台送至作业点,并且可以使作业平台始终保持水平状态,同时能够在整个过程中对作业平台的负载进行精准监测,从而保障操作人员的安全。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:一种行走式高空作业平台,包括行走底座,行走底座上设有转台,转台上固定有桅柱式升降装置,桅柱式升降装置上铰接有可伸缩的大支撑臂的一端,大支撑臂的另一端通过连接结构连接有作业平台,大支撑臂和桅柱式升降装置之间设有上下变幅机构,桅柱式升降装置、大支撑臂和连接结构之间设有找平机构。
5、优选的,连接结构包括两块呈对称设置的第一连接板,两块第一连接板的前端外侧通过第一连接轴连接有第二连接板,第二连接板上设有第一连接轴通过的横向腰孔,第一连接板上设有第一连接轴通过的第一圆孔,两块第二连接板的前端部固定有第三连接板,第三连接板上固定有作业平台。
6、优选的,两块第二连接板之间还设有若干第二连接轴,第一连接板上固定有第二连接轴通过的轴套,轴套上开设有的竖向腰孔,第二连接板上设有第二连接轴通过的第二圆孔。
7、优选的,上下变幅机构包括固定在靠近大支撑臂下端前后两侧的两块第一固定板,两块第一固定板之间铰接有第一油缸的一端,第一油缸的另一端铰接在桅柱式升降装置上。
8、优选的,找平机构包括第二油缸和第三油缸,第二油缸和第三油缸相连通,其中第二油缸的一端铰接在桅柱式升降装置上,其另一端铰接在两块第二固定板上,两块第二固定板分别固定在大支撑臂的前后两侧,第三油缸的一端铰接在连接结构的上端,其另一端铰接在大支撑臂的底端。
9、优选的,第一连接轴的两个端部伸出第二连接板,且第一连接轴的两个端部通过l型板与第三连接板固定连接,第一连接轴的其中一个端部上设有称重传感器。
10、优选的,第二连接轴的两个端部伸出第二连接板,且第二连接轴的两个端部上套有环形套,环形套的一端与第二连接板固定连接,环形套与第二连接轴之间通过螺丝和螺帽固定在一起。
11、优选的,第一圆孔的边缘向外设有第一凹槽,第一凹槽的下端固定有第一磁块,第一连接轴上与第一磁块相对的位置处固定有第二磁块,第一磁块与第二磁块两者之间相斥,第一凹槽的上端固定有第三磁块,第一连接轴上与第三磁块相对的位置处固定有第四磁块,第三磁块和第四磁块两者之间相吸。
12、优选的,横向腰孔的上下边缘向外均设有第二凹槽,第二凹槽内设有活动板,活动板的内端设有半圆形槽,且活动板与第二凹槽滑动连接,第二凹槽的底面与活动板之间连接有若干弹簧。
13、优选的,行走底座的底部设有坑洞板结构。
14、(三)有益效果
15、1.本发明通过本发明通过可伸缩的大支撑臂和上下变幅机构的设置,可以在遇到障碍物的时候,行走底座不用开得离作业点很近也能将作业平台送至作业点,能够灵活地调节横向和纵向上的距离,在上下变幅机构调节的过程中,作业平台会随之发生倾斜,这时就通过找平机构来使得作业平台保持水平的状态,进而保证操作人员的安全性,其中连接结构能够对作业平台的负载进行精准监测,同时也保证了作业平台固定的稳定性,进而最终保证高空作业人员作业的安全性;
16、2.本发明通过第一磁块和第二磁块的设置,并且将两者相对的两端设置为同极相斥的,通过第三磁块和第四磁块的设置,并且将两者之间设置成相吸的,这样在第一连接轴的上方设置一个对其的吸引力,在其下方设置了一个对其的斥力,两个力叠加,大大增加了第一连接轴的负载,同时在作业平台受到瞬间的压力的时候,能够对这个瞬间变化的压力起到很好的缓冲效果,大大增加了作业平台的稳定性;
17、3.本发明通过第二凹槽、活动板、半圆形槽以及弹簧等的设置,当作业平台的负载有所变化的时候,弹簧能够对瞬间变化的压力起到很好的缓冲作用,保证稳定性,很好地避免了横向腰孔的变形,同时大大减轻了第一连接轴的负载,最后该设置,使得整根的第一连接轴是被包裹住的,这样受力的面比较大且均匀,不容易出现变形。
技术特征:
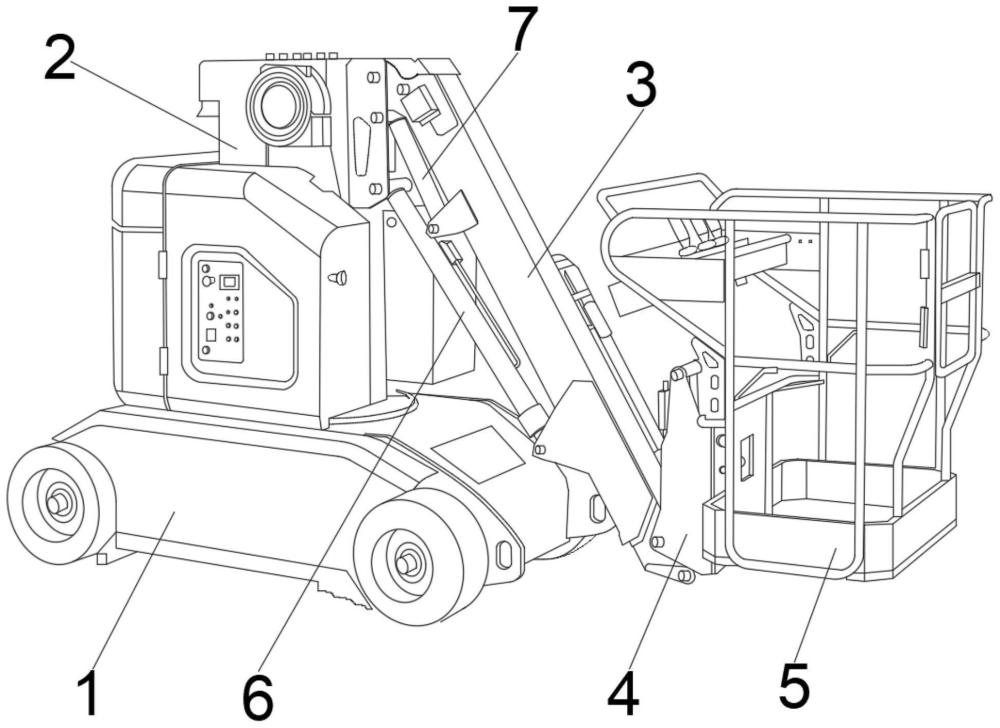
1.一种行走式高空作业平台,其特征在于,包括行走底座(1),所述行走底座(1)上设有转台,所述转台上固定有桅柱式升降装置(2),所述桅柱式升降装置(2)上铰接有可伸缩的大支撑臂(3)的一端,所述大支撑臂(3)的另一端通过连接结构(4)连接有作业平台(5),所述大支撑臂(3)和桅柱式升降装置(2)之间设有上下变幅机构(6),所述桅柱式升降装置(2)、所述大支撑臂(3)和所述连接结构(4)之间设有找平机构(7)。
2.根据权利要求1所述的一种行走式高空作业平台,其特征在于,所述连接结构(4)包括两块呈对称设置的第一连接板(8),两块所述第一连接板(8)的前端外侧通过第一连接轴(9)连接有第二连接板(10),所述第二连接板(10)上设有所述第一连接轴(9)通过的横向腰孔(11),所述第一连接板(8)上设有所述第一连接轴(9)通过的第一圆孔(12),两块所述第二连接板(10)的前端部固定有第三连接板(13),所述第三连接板(13)上固定有所述作业平台(5)。
3.根据权利要求2所述的一种行走式高空作业平台,其特征在于,两块所述第二连接板(10)之间还设有若干第二连接轴(14),所述第一连接板(8)上固定有所述第二连接轴(14)通过的轴套(15),所述轴套(15)上开设有的竖向腰孔(16),所述第二连接板(10)上设有所述第二连接轴(14)通过的第二圆孔(17)。
4.根据权利要求1所述的一种行走式高空作业平台,其特征在于,所述上下变幅机构(6)包括固定在靠近所述大支撑臂(3)下端前后两侧的两块第一固定板(18),两块所述第一固定板(18)之间铰接有第一油缸(19)的一端,所述第一油缸(19)的另一端铰接在所述桅柱式升降装置(2)上。
5.根据权利要求1所述的一种行走式高空作业平台,其特征在于,所述找平机构(7)包括第二油缸(20)和第三油缸(21),所述第二油缸(20)和所述第三油缸(21)相连通,其中所述第二油缸(20)的一端铰接在所述桅柱式升降装置(2)上,其另一端铰接在两块第二固定板(22)上,两块所述第二固定板(22)分别固定在所述大支撑臂(3)的前后两侧,所述第三油缸(21)的一端铰接在所述连接结构(4)的上端,其另一端铰接在所述大支撑臂(3)的底端。
6.根据权利要求2所述的一种行走式高空作业平台,其特征在于,所述第一连接轴(9)的两个端部伸出所述第二连接板(10),且所述第一连接轴(9)的两个端部通过l型板(23)与所述第三连接板(13)固定连接,所述第一连接轴(9)的其中一个所述端部上设有称重传感器。
7.根据权利要求3所述的一种行走式高空作业平台,其特征在于,所述第二连接轴(14)的两个端部伸出所述第二连接板(10),且所述第二连接轴(14)的两个端部上套有环形套(24),所述环形套(24)的一端与所述第二连接板(10)固定连接,所述环形套(24)与所述第二连接轴(14)之间通过螺丝(25)和螺帽(26)固定在一起。
8.根据权利要求2所述的一种行走式高空作业平台,其特征在于,所述第一圆孔(12)的边缘向外设有第一凹槽(27),所述第一凹槽(27)的下端固定有第一磁块(28),所述第一连接轴(9)上与所述第一磁块(28)相对的位置处固定有第二磁块(29),所述第一磁块(28)与所述第二磁块(29)两者之间相斥,所述第一凹槽(27)的上端固定有第三磁块(30),所述第一连接轴(9)上与所述第三磁块(30)相对的位置处固定有第四磁块(31),所述第三磁块(30)和所述第四磁块(31)两者之间相吸。
9.根据权利要求2所述的一种行走式高空作业平台,其特征在于,所述横向腰孔(11)的上下边缘向外均设有第二凹槽(32),所述第二凹槽(32)内设有活动板(33),所述活动板(33)的内端设有半圆形槽(34),且所述活动板(33)与所述第二凹槽(32)滑动连接,所述第二凹槽(32)的底面与所述活动板(33)之间连接有若干弹簧(35)。
10.根据权利要求1所述的一种行走式高空作业平台,其特征在于,所述行走底座(1)的底部设有坑洞板结构(38)。
技术总结
本发明涉及高空作业领域,尤其涉及一种行走式高空作业平台,包括行走底座,行走底座上设有转台,转台上固定有桅柱式升降装置,桅柱式升降装置上铰接有可伸缩的大支撑臂的一端,大支撑臂的另一端通过连接结构连接有作业平台,大支撑臂和桅柱式升降装置之间设有上下变幅机构,桅柱式升降装置、大支撑臂和连接结构之间设有找平机构,该作业平台即使在遇到障碍物的情况下也能将作业平台送至作业点,并且可以使作业平台始终保持水平状态,同时能够在整个过程中对作业平台的负载进行精准监测,从而保障操作人员的安全。
技术研发人员:许树根,许仲
受保护的技术使用者:浙江鼎力机械股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!