行驶控制系统、行驶控制方法及作业机械与流程
本发明涉及作业机械,尤其涉及一种行驶控制系统、行驶控制方法及作业机械。
背景技术:
1、叉车等作业机械上通常设置有前进踏板及后退踏板。前进踏板用于控制作业机械前进,后退踏板用于控制作业机械后退。现有技术中,通常采用机械锁止结构实现前进踏板与后退踏板的互锁。例如,当前进踏板处于踩踏状态时,机械锁止结构会将后退踏板抬高锁止,此时,作业机械前行。当后退踏板处于踩踏状态时,机械锁止结构会将前进踏板抬高锁止,此时,作业机械后退。这种行驶控制结构中,在每次踩踏相应的行驶踏板时,机械锁止结构均会进行对应的机械锁止动作,长时间使用后容易造成机械锁止结构的磨损,进而,会影响作业机械前进动作和后退动作的互锁可靠性。
技术实现思路
1、本发明提供一种行驶控制系统、行驶控制方法及作业机械,用以解决或者改善现有技术中机械锁止结构容易造成磨损,进而影响作业机械前进动作和后退动作的互锁可靠性的问题。
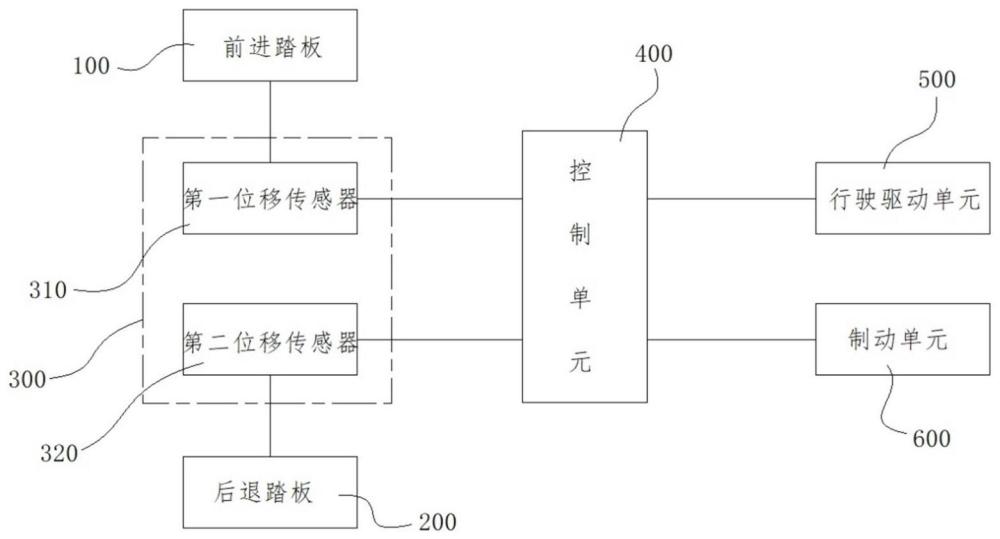
2、根据本发明的第一方面,提供了一种行驶控制系统,包括前进踏板、后退踏板、踏板状态检测单元、制动单元及控制单元。
3、其中,所述踏板状态检测单元与所述前进踏板及所述后退踏板连接,并用于分别检测所述前进踏板及所述后退踏板的状态。所述控制单元与所述踏板状态检测单元及所述制动单元连接。所述控制单元用于在所述前进踏板与所述后退踏板同时处于踩踏状态下启动所述制动单元。
4、根据本发明提供的一种行驶控制系统,所述行驶控制系统还包括行驶驱动单元。
5、所述控制单元与所述行驶驱动单元连接。所述控制单元用于在所述前进踏板与所述后退踏板中一者处于踩踏状态下启动所述行驶驱动单元。
6、根据本发明提供的一种行驶控制系统,所述踏板状态检测单元包括第一位移传感器和第二位移传感器。所述第一位移传感器与所述前进踏板连接,并用于检测所述前进踏板的状态;所述第二位移传感器与所述后退踏板连接,并用于检测所述后退踏板的状态。
7、根据本发明提供的一种行驶控制系统,所述行驶驱动单元包括电机。所述控制单元与所述第一位移传感器、所述第二位移传感器及所述电机连接。所述控制单元用于在所述第一位移传感器发出电信号且第二位移传感器无电信号的状态下,控制所述电机正向转动;或者,用于在所述第二位移传感器发出电信号且第一位移传感器无电信号的状态下,控制所述电机反向转动。
8、根据本发明提供的一种行驶控制系统,所述控制单元用于基于所述第一位移传感器或者所述第二位移传感器发出电信号的大小调节所述电机的转速。
9、根据本发明提供的一种行驶控制系统,所述制动单元与所述电机连接。所述控制单元用于在所述第一位移传感器及所述第二位移传感器均发出电信号的状态下,控制所述制动单元制动所述电机。
10、根据本发明提供的一种行驶控制方法,基于前进踏板与后退踏板同时处于踩踏状态,控制制动单元启动。
11、根据本发明提供的一种行驶控制方法,基于前进踏板与后退踏板中一者处于踩踏状态,控制所述行驶驱动单元启动。
12、根据本发明提供的一种行驶控制方法,所述基于前进踏板与后退踏板中一者处于踩踏状态,控制所述行驶驱动单元启动的步骤,具体包括:
13、基于前进踏板处于踩踏状态,控制电机正向转动,并基于前进踏板的踩踏深度,调节电机的转速;
14、基于后退踏板处于踩踏状态,控制电机反向转动,并基于后退踏板的踩踏深度,调节电机的转速。
15、根据本发明的第二方面,提供了一种作业机械,包括如上所述的行驶控制系统,或者,以如上所述的行驶控制方法控制行走动作。
16、在本发明提供的行驶控制系统中,包括前进踏板、后退踏板、踏板状态检测单元、制动单元及控制单元。前进踏板用于控制作业机械前进动作,后退踏板用于控制作业机械后退动作。踏板状态检测单元用于分别检测前进踏板及后退踏板的状态。制动单元用于制动作业机械。其中,制动单元为作业机械原有的制动结构。控制单元与踏板状态检测单元及制动单元连接,并能够基于踏板状态检测单元的检测结果控制制动单元的工作状态。
17、例如,踏板状态检测单元能够分别检测前进踏板及后退踏板处于踩踏状态或者非踩踏状态,并向控制单元发送检测结果。例如,当前进踏板和后退踏板同时处于踩踏状态时,踏板状态检测单元能够向控制单元发送两个电信号。当前进踏板和后退踏板中的一者处于踩踏状态时,踏板状态检测单元能够向控制单元发送一个电信号。当前进踏板和后退踏板均处于非踩踏状态时,踏板状态检测单元不向控制单元发送电信号。当踏板状态检测单元检测到前进踏板和后退踏板同时处于踩踏状态时,控制单元控制制动单元制动作业机械。由此,能够实现前进动作与后退动作的互锁。
18、通过这种结构设置,由踏板状态检测单元检测前进踏板及后退踏板的状态,控制单元基于踏板状态检测单元的检测结果控制制动单元的工作状态。具体地,当前进踏板和后退踏板同时处于踩踏状态时,控制单元控制制动单元启动,由此实现作业机械前进动作与后退动作的互锁。在该行驶控制系统中,无需设置用于实现前进踏板和后退踏板互锁的械锁止结构,其结构简单,且前进动作和后退动作的互锁可靠性较高。
19、进一步,在本发明提供的作业机械中,由于其包括如上所述的行驶控制系统,因此,同样具备如上所述的各项优势。
技术特征:
1.一种行驶控制系统,其特征在于,包括前进踏板、后退踏板、踏板状态检测单元、制动单元及控制单元,
2.根据权利要求1所述的行驶控制系统,其特征在于,所述行驶控制系统还包括行驶驱动单元,
3.根据权利要求2所述的行驶控制系统,其特征在于,所述踏板状态检测单元包括第一位移传感器和第二位移传感器,所述第一位移传感器与所述前进踏板连接,并用于检测所述前进踏板的状态;所述第二位移传感器与所述后退踏板连接,并用于检测所述后退踏板的状态。
4.根据权利要求3所述的行驶控制系统,其特征在于,所述行驶驱动单元包括电机,所述控制单元与所述第一位移传感器、所述第二位移传感器及所述电机连接,所述控制单元用于在所述第一位移传感器发出电信号且第二位移传感器无电信号的状态下,控制所述电机正向转动;或者,用于在所述第二位移传感器发出电信号且第一位移传感器无电信号的状态下,控制所述电机反向转动。
5.根据权利要求4所述的行驶控制系统,其特征在于,所述控制单元用于基于所述第一位移传感器或者所述第二位移传感器发出电信号的大小调节所述电机的转速。
6.根据权利要求5所述的行驶控制系统,其特征在于,所述制动单元与所述电机连接,所述控制单元用于在所述第一位移传感器及所述第二位移传感器均发出电信号的状态下,控制所述制动单元制动所述电机。
7.一种基于根据权利要求1至6中任一项所述的行驶控制系统进行的行驶控制方法,其特征在于,包括:
8.根据权利要求7所述的行驶控制方法,其特征在于,所述行驶控制方法还包括:
9.根据权利要求8所述的行驶控制方法,其特征在于,所述基于前进踏板与后退踏板中一者处于踩踏状态,控制所述行驶驱动单元启动的步骤,具体包括:
10.一种作业机械,其特征在于,包括根据权利要求1至6中任一项所述的行驶控制系统,或者,以根据权利要求7至9中任一项所述的行驶控制方法控制行走动作。
技术总结
本发明涉及作业机械技术领域,提出了一种行驶控制系统、行驶控制方法及作业机械。行驶控制系统包括前进踏板、后退踏板、踏板状态检测单元、制动单元及控制单元。踏板状态检测单元与前进踏板及后退踏板连接,并用于分别检测前进踏板及后退踏板的状态。控制单元与踏板状态检测单元及制动单元连接。控制单元用于在前进踏板与后退踏板同时处于踩踏状态下启动制动单元。通过这种结构设置,当前进踏板和后退踏板同时处于踩踏状态时,控制单元控制制动单元启动,由此实现作业机械前进动作与后退动作的互锁。在该行驶控制系统中,无需设置用于实现前进踏板和后退踏板互锁的械锁止结构,其结构简单,且前进动作和后退动作的互锁可靠性较高。
技术研发人员:毛宇宸,汪剑奇,孙永前
受保护的技术使用者:三一机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!