一种塔式起重机吊钩防碰撞方法及系统与流程
本发明涉及塔式起重机,具体是一种塔式起重机吊钩防碰撞方法及系统。
背景技术:
1、在传统的塔式起重机施工中,塔式起重机与施工现场障碍物的安全间距是由人工操作员根据经验和直觉来控制的。这种方法存在人为因素的不确定性,容易导致人为疏忽或误判,增加了塔式起重机碰撞的风险。
技术实现思路
1、本发明的主要目的在于提供一种塔式起重机吊钩防碰撞方法及系统,以解决上述现有技术中人为判断塔式起重机与障碍物安全间距,增加了塔式起重机碰撞的风险的问题。
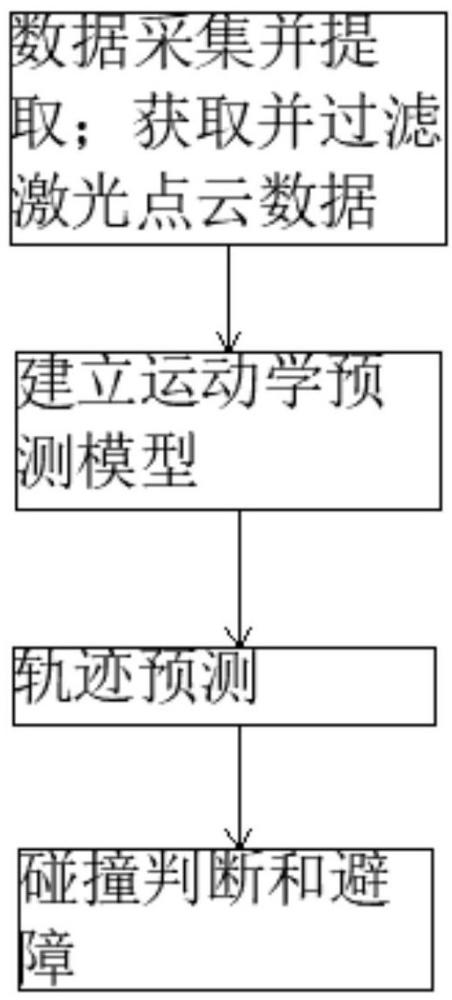
2、为了实现上述目的,本发明提供了:一种塔式起重机吊钩防碰撞方法,包括以下步骤:
3、s1、吊钩行驶时数据采集并提取吊钩的当前位置、吊物尺寸、小车变幅速度vr、起重臂回转角速度ωt、吊钩线速度vt;
4、获取并过滤激光点云数据,保留吊钩周围设定水平区域的激光点云数据;
5、s2、基于刚体的旋转运动原理,建立一个运动学预测模型;
6、首先确定吊钩的极坐标位置(r,s);
7、其次小车变幅长度r是随时间t变化的,可以通过积分小车变幅速度vr来计算,
8、r=∫[0,t]vr(τ)dτ+r0,r0是初始变幅长度;
9、起重臂回转角度s也是随时间t变化的,可以通过积分起重臂回转角速度ωt来计算,s=∫[0,t]ωt(τ)dτ+t0,t0是初始旋转角度;
10、最后将极坐标位置转换为笛卡尔坐标,
11、x=r*cos(s),
12、y=r*sin(s);
13、s3、使用建立的模型来进行吊钩周围设定水平区域内的轨迹预测;
14、s4、进行碰撞判断,最小安全距离d,检测吊钩周围设定水平区域的障碍物,根据检测到的多个障碍物的位置计算并筛选出障碍物与吊钩行驶轨迹的最短距离d,判断d是否小于d,若d小于d,则将吊钩上升避障。
15、进一步的,吊钩周围设定水平区域为扇形区域,扇形区域的顶点为吊钩的位置,扇形区域的弧的中点位于吊钩水平行驶方向的正前方。
16、进一步的,扇形区域的半径r和圆心角θ的大小由吊钩线速度vt、小车变幅速度vr以及最小安全距离d决定:
17、r=sqrt(vr*kd*vr*kdl+vt*kd*vt*kd)+d,其中10≥kd≥5;
18、θ=180°/kt,其中10≥kt≥5。
19、进一步的,最小安全距离d由吊物尺寸来确定,根据吊物尺寸确定最小安全半径r_ms为吊物水平方向的最大尺寸的一半;根据吊绳长度和吊物高度确定最小安全盲区d_bs为吊物竖直方向的最大尺寸;通过对比r_ms和d_bs选择最大值作为最小安全距离d。
20、本发明还提供了一种用于完成塔式起重机吊钩防碰撞方法的系统,包括数据采集装置、中央处理器,数据采集装置包括用于获取激光点云数据的激光雷达、用于检测吊物尺寸的摄像头、用于检测吊钩高度的升降编码器、用于检测小车变幅速度vr的变幅编码器、用于检测吊钩线速度vt的线速度计、用于检测起重臂回转角速度的回转编码器;中央处理器用于接收数据采集装置的数据,进行计算和分析,建立运动学预测模型,进行碰撞判断,并在有碰撞风险时控制吊钩上升避障。
21、进一步的,激光雷达通过雷达支架设置在吊钩上,摄像头通过摄像头支架设置在吊钩上,升降编码器设置在升降电机轴上,变幅编码器设置在变幅电机轴上,线速度计设置在吊钩上方,回转编码器设置在回转电机轴上。
22、本发明的有益效果是:
23、本发明能够对起重机吊钩的行驶路径进行预测,计算是否有碰撞风险,并在有碰撞风险时控制吊钩上升避障;从而避免了人工判断存在误判的问题,减少了塔式起重机碰撞的风险。
24、本发明只保留设定区域内的激光点云数据,减少对中央处理器算力的要求并保证系统实时性。
技术特征:
1.一种塔式起重机吊钩防碰撞方法,其特征在于,包括以下步骤:
2.如权利要求1所述的塔式起重机吊钩防碰撞方法,其特征在于,所述吊钩周围设定水平区域为扇形区域,扇形区域的顶点为吊钩的位置,扇形区域的弧的中点位于吊钩水平行驶方向的正前方。
3.如权利要求2所述的塔式起重机吊钩防碰撞方法,其特征在于,所述扇形区域的半径r和圆心角θ的大小由吊钩线速度vt、小车变幅速度vr以及最小安全距离d决定:
4.如权利要求3所述的塔式起重机吊钩防碰撞方法,其特征在于,所述最小安全距离d由吊物尺寸来确定,根据吊物尺寸确定最小安全半径r_ms为吊物水平方向的最大尺寸的一半;根据吊绳长度和吊物高度确定最小安全盲区d_bs为吊物竖直方向的最大尺寸;通过对比r_ms和d_bs选择最大值作为最小安全距离d。
5.一种用于完成权利要求1-4中任一塔式起重机吊钩防碰撞方法的系统,其特征在于,包括数据采集装置、中央处理器,所述数据采集装置包括用于获取激光点云数据的激光雷达、用于检测吊物尺寸的摄像头、用于检测吊钩高度的升降编码器、用于检测小车变幅速度vr的变幅编码器、用于检测吊钩线速度vt的线速度计、用于检测起重臂回转角速度的回转编码器;所述中央处理器用于接收数据采集装置的数据,进行计算和分析,建立运动学预测模型,进行碰撞判断,并在有碰撞风险时控制吊钩上升避障。
6.如权利要求5所述的系统,其特征在于,所述激光雷达通过雷达支架设置在吊钩上,所述摄像头通过摄像头支架设置在吊钩上,所述升降编码器设置在升降电机轴上,所述变幅编码器设置在变幅电机轴上,所述线速度计设置在吊钩上方,所述回转编码器设置在回转电机轴上。
技术总结
本发明涉及塔式起重机技术领域,具体是一种塔式起重机吊钩防碰撞方法及系统,包括:S1、吊钩行驶时数据采集并提取,获取并过滤激光点云数据,保留吊钩周围设定水平区域的激光点云数据;S2、基于刚体的旋转运动原理,建立一个运动学预测模型;S3、使用建立的模型来进行吊钩周围设定水平区域内的轨迹预测;S4、进行碰撞判断,最小安全距离D,检测吊钩周围设定水平区域的障碍物,根据检测到的多个障碍物的位置计算并筛选出障碍物与吊钩行驶轨迹的最短距离d,判断d是否小于D,若d小于D,则将吊钩上升避障;本发明能够对起重机吊钩的行驶路径进行预测,计算是否有碰撞风险,并在有碰撞风险时控制吊钩上升避障;从而降低了塔式起重机碰撞的风险。
技术研发人员:魏国亮,丁洪磊,李忠恒,吴丰收,王士博
受保护的技术使用者:中科骊久(济南)机器人有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!