一种水下无人子平台安全运动控制方法与流程
本发明属于电气控制,具体涉及一种水下无人子平台安全运动控制方法。
背景技术:
1、永磁电机作为当前一种高效、节能的机械设备,被广泛应用于船舶、矿山、电梯、水下发射平台等领域。
2、水下无人子平台由牵引电机驱动系统牵引、制动电机驱动装置低拉力拖拽,完成子平台的快速运动功能;由制动电机驱动系统回拉、牵引电机驱动装置低拉力拖拽,完成子平台的复位功能。
3、子平台运动时,若牵引电机驱动系统或制动电机驱动系统故障,子平台因惯性继续运动,需利用牵引电机驱动系统或制动电机驱动系统的电刹车、机械刹车力矩确保子平台能快速、安全停止运动,避免子平台与母平台出现碰撞,损坏设备。
技术实现思路
1、为了提高水下无人子平台运动的安全性,本发明提出一种水下无人子平台安全运动控制方法。
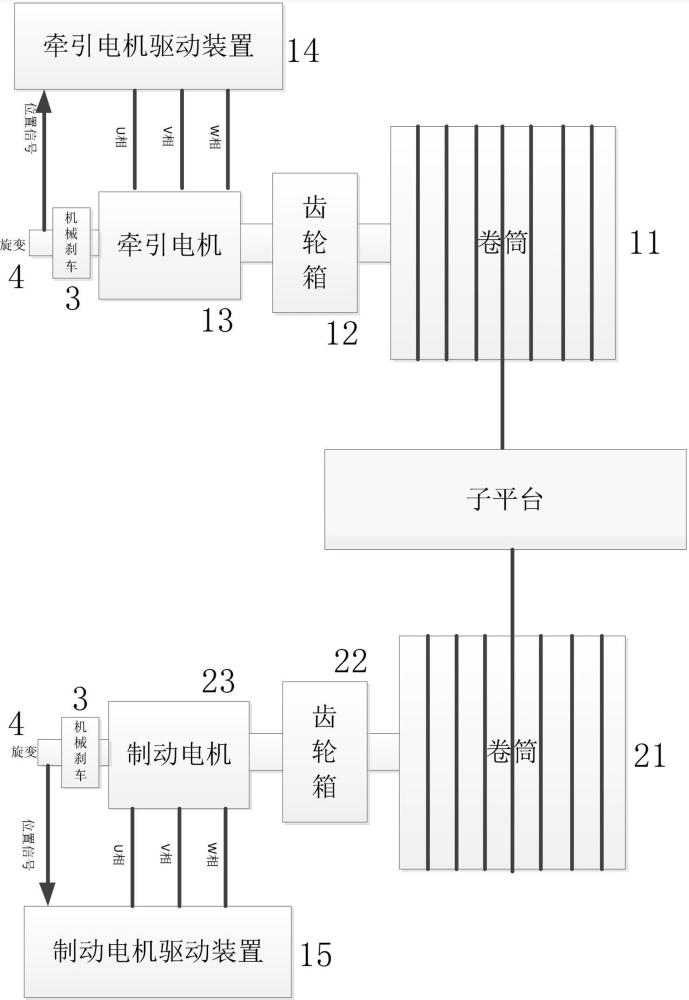
2、本发明解决其技术问题所采用的技术方案是:一种水下无人子平台安全运动控制方法,基于牵引电机驱动系统、制动电机驱动系统和子平台组成的子平台驱动系统,所述的牵引电机驱动系统包括通过缠绕钢丝绳连接子平台的牵引卷筒,牵引卷筒依次连接牵引齿轮箱、带机械刹车和旋变的牵引电机以及牵引电机驱动装置,所述的制动电机驱动系统包括通过缠绕钢丝绳连接子平台的制动卷筒,制动卷筒依次连接制动齿轮箱、带牵引电机和制动电机的制动电机以及带机械刹车和电刹车的制动电机驱动装置;以任选其一的方式完成如下步骤:
3、s1,子平台正向运动时牵引电机驱动装置故障下的牵引电机驱动装置刹车控制方法:牵引电机驱动装置驱动牵引电机并实时检测牵引电机的转速,通过牵引齿轮箱和牵引卷筒拖动子平台正向运动时,若制动电机驱动装置非运行状态且牵引电机驱动装置突然故障,则牵引电机以大于设定值的转速反转,牵引电机驱动装置快速投入机械刹车,牵引电机驱动装置的机械刹车提供刹车力矩禁止子平台向制动电机方向运动;
4、s2,子平台正向运动时牵引电机驱动装置故障下的制动电机驱动装置刹车控制方法:子平台正向运动时,制动电机驱动装置驱动制动电机并实时检测制动电机的转速,若牵引电机驱动装置突然故障,则制动电机以大于设定值的转速反转,制动电机驱动装置快速降速至零,先后投入电刹车停机和机械刹车,提供刹车力矩禁止子平台向牵引电机方向运动;
5、s3,子平台反向运动时牵引电机驱动装置故障下的制动电机驱动装置刹车控制方法:制动电机驱动装置驱动制动电机牵引子平台反向运动时,牵引电机驱动装置驱动牵引电机处于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态,若牵引电机驱动装置突然故障,制动电机驱动装置检测到制动电机处于正转运行状态,则制动电机驱动装置停机、投入机械刹车,禁止子平台向牵引电机方向运动,确保子平台运动安全性;
6、s4,子平台反向运动时制动电机驱动装置故障下的制动电机驱动装置刹车控制方法:制动电机驱动装置驱动制动电机,通过制动齿轮箱和制动卷筒拖动子平台正向运动时,若制动电机驱动装置故障,牵引电机驱动装置不再响应系统启动指令禁止运行,避免牵引电机驱动装置牵引子平台做无效运动、磨损机械刹车来保证子平台运动的安全性;
7、s5,子平台正向运动时制动电机驱动装置故障下的牵引电机驱动装置刹车控制方法:牵引电机驱动装置驱动牵引电机拖动子平台正向运动时,制动电机驱动装置驱动制动电机处于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态,若制动电机驱动装置突然故障,则牵引电机驱动装置停机并投入机械刹车,制动电机驱动装置强行投入机械刹车,通过牺牲制动电机驱动装置机械刹车来保证子平台运动的安全性;
8、s6,子平台反向运动时制动电机驱动装置故障下的牵引电机驱动装置刹车控制流方法:牵引电机驱动装置驱动牵引电机牵引子平台反向运动时,牵引电机驱动装置驱动牵引电机处于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态,若制动电机驱动装置突然故障,则制动电机驱动装置投入机械刹车,规避子平台向牵引电机方向运动安全问题,牵引电机驱动装置停机、投入机械刹车,规避子平台向制动电机方向运动安全问题。
9、进一步,所述的步骤s1中,制动电机驱动装置非运行状态时,子平台倾角较大时子平台倾斜力大于摩擦力,若子平台向牵引电机方向倾斜,因制动电机驱动装置的机械刹车处于投入状态,制动电机驱动装置的机械刹车力矩限制了子平台向牵引电机方向运动;若子平台向制动电机方向倾斜,因牵引电机驱动装置处于零转速模式状态,牵引电机驱动装置电拉力限制了子平台向制动电机方向运动。
10、进一步,所述的步骤s2中,在规定时间内,若制动电机驱动装置的电刹车未能将制动电机反转转速限定在在安全范围内,则强行投入机械刹车,利用机械刹车吸收子平台惯性能量,通过电刹车和机械刹车提供刹车力矩禁止子平台向牵引电机方向运动。
11、更进一步,所述的步骤s2中子平台正向运动时,牵引电机驱动系统工作于转速模式牵引子平台,制动电机工作于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态。
12、再进一步,所述的步骤s3中子平台反向运动时,制动电机驱动系统工作于转速模式牵引子平台,牵引电机工作于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态。
13、本发明的有益效果是:本发明的牵引电机驱动装置故障下安全运动控制方法、制动电机驱动装置故障下安全运动控制方法,通过牵引电机驱动装置和制动电机驱动装置信息交互及协同控制,利用牵引电机驱动装置的机械刹车力矩和制动电机驱动装置的电刹车能量吸收能力及机械刹车磨擦作用,通过牺牲制动电机驱动装置机械刹车保证子平台运动的安全性,具备响应快、可靠性、安全性高等优点。
技术特征:
1.一种水下无人子平台安全运动控制方法,基于牵引电机驱动系统、制动电机驱动系统和子平台组成的子平台驱动系统,所述的牵引电机驱动系统包括通过钢丝绳连接子平台的牵引卷筒(11),牵引卷筒(11)依次连接牵引齿轮箱(12)、带机械刹车(3)和旋变(4)的牵引电机(13)以及牵引电机驱动装置(14),所述的制动电机驱动系统包括通过钢丝绳连接子平台的制动卷筒(21),制动卷筒(21)依次连接制动齿轮箱(22)、带牵引电机(13)和制动电机(23)的制动电机(23)以及带机械刹车(3)和电刹车的制动电机驱动装置(24);其特征在于:以任选其一的方式完成如下步骤
2.根据权利要求1所述的一种水下无人子平台安全运动控制方法,其特征在于,所述的步骤s1中,制动电机驱动装置(24)非运行状态时,子平台倾斜力大于摩擦力,若子平台向牵引电机(13)方向倾斜,制动电机驱动装置(24)的机械刹车(3)力矩限制了子平台向牵引电机(13)方向运动;若子平台向制动电机(23)方向倾斜,牵引电机驱动装置(14)限制子平台向制动电机(23)方向运动。
3.根据权利要求2所述的一种水下无人子平台安全运动控制方法,其特征在于,所述的步骤s2中,在规定时间内,若制动电机驱动装置(24)的电刹车未能将制动电机(23)反转转速限定在在安全范围内,则强行投入机械刹车(3),通过电刹车和机械刹车(3)提供刹车力矩禁止子平台向牵引电机(13)方向运动。
4.根据权利要求3所述的一种水下无人子平台安全运动控制方法,其特征在于,所述的步骤s2中子平台正向运动时,牵引电机驱动系统工作于转速模式牵引子平台,制动电机(23)工作于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态。
5.根据权利要求4所述的一种水下无人子平台安全运动控制方法,其特征在于,所述的步骤s3中子平台反向运动时,制动电机驱动系统工作于转速模式牵引子平台,牵引电机(13)工作于低转矩模式,提供低制动力矩确保钢丝绳处于紧绷状态。
技术总结
本发明公开了一种水下无人子平台安全运动控制方法,包括子平台正向运动时牵引电机驱动装置故障下牵引电机驱动装置刹车控制和牵引电机驱动装置故障下制动电机驱动装置刹车控制,子平台反向运动时牵引电机驱动装置故障下制动电机驱动装置刹车控制和制动电机驱动装置故障下制动电机驱动装置刹车控制,子平台正向运动时制动电机驱动装置故障下牵引电机驱动装置刹车控制和子平台反向运动时制动电机驱动装置故障下牵引电机驱动装置刹车控制;本发明通过牵引电机驱动装置和制动电机驱动装置电刹车、机械刹车协同控制,可确保水下无人子平台运动安全性。
技术研发人员:胡传西,陈坤,王定章,周鑫,李晨洋
受保护的技术使用者:武汉船用电力推进装置研究所(中国船舶集团有限公司第七一二研究所)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!