一种多自由度调整机构及物料输送装置的制作方法
本发明属于姿态调整领域,具体涉及一种多自由度调整机构及物料输送装置。
背景技术:
1、姿态调整机构在当前的智能制造领域应用广泛,如光伏领域或半导体领域中,需要在曝光台、检测台、光刻台等处需要对硅片或电池片进行姿态调整,这具有高效、高精度的要求。
2、然而,传统的姿态调整机构,如专利cn104297883b公开的四自由度微调支架,其虽然调平精密,但操作繁琐,效率低;如专利twi468599b公开的三自由度万向节,则因其结构占用空间大,锁定不精准等问题难以在这些场景应用;再如cn2846873y公开的多自由度活动连接构件,其也因为结构问题在有限环境中应用受限。
3、因此,亟需开发一款操作高效、精度高且空间占用小的自研调整机构。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种多自由度调整机构及物料输送装置,其能解决上述问题。
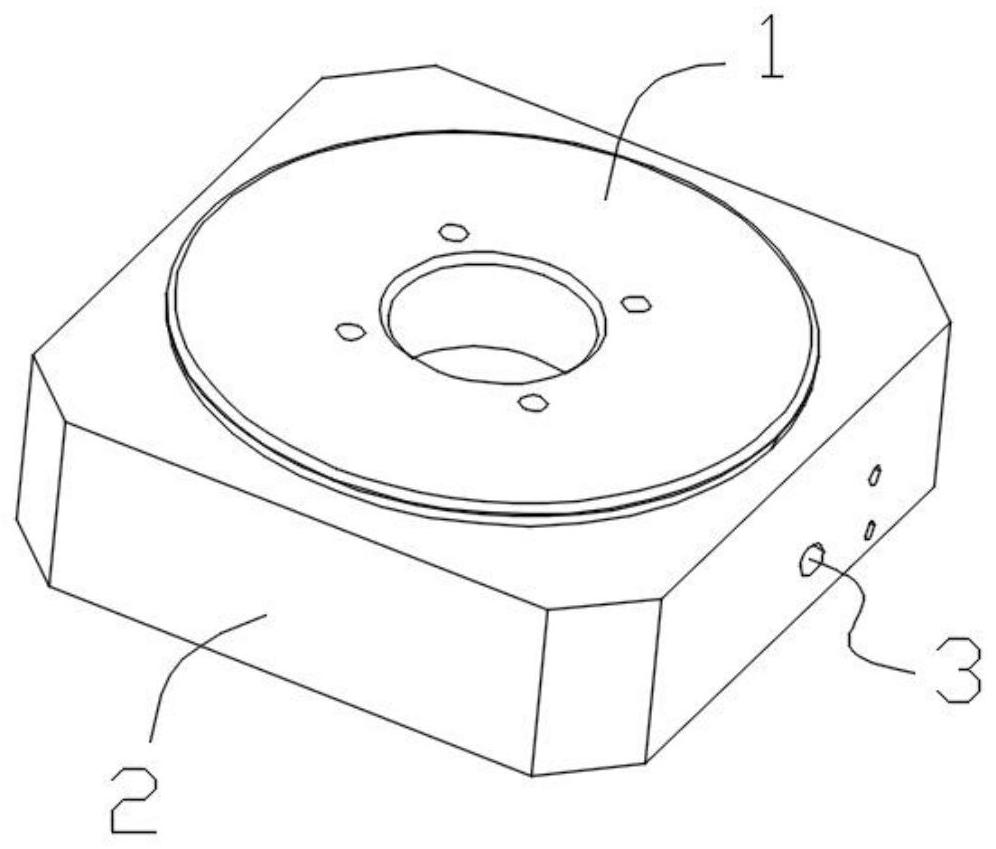
2、一种多自由度调整机构,多自由度调整机构包括第一调整件、第二调整件和锁定单元;锁定单元用于所述第一调整件和第二调整件多自由度的位置调整后的位置锁定。
3、进一步的,锁定单元的形式采用真空吸合锁定、机械驱动锁定、液压驱动锁定、磁吸锁定中的一种或它们的组合。
4、进一步的,所述锁定单元采用真空吸合锁定,所述第一调整件和第二调整件可吸合分离的部分面接触,所述锁定单元包括在第一调整件和/或第二调整件上贯通开设的气道;所述气道的内端口连通至第一调整件和第二调整件的邻接面,用于向两者提供抽真空或破真空,以此实现第一调整件和第二调整件的吸合锁定及分离调整;所述气道的外端口设置气阀接头,用于与外接真空组件连接。
5、进一步的,所述第一调整件包括第一抵接部和第一连接部,所述第二调整件包括第二抵接部和第二连接部;所述第一抵接部和第二抵接部在吸合状态下至少部分的面接触。
6、进一步的,所述第一调整件的第一抵接部和所述第二调整件的第二抵接部的密封接触面为球面、弧形面、锥面或它们的组合。
7、进一步的,所述第一调整件的第一连接部上开设第一连接孔组,所述第二调整件的第二连接部上开设第二连接孔组,第一连接孔组与第二连接孔组用于与外部构件连接。
8、进一步的,所述第一连接部上还开设第一连接稳定槽。
9、进一步的,在第一调整件的第一抵接部与所述第二调整件的第二抵接部之间设置一个弹簧,用于两者的分离复位。
10、本发明还提供了一种物料输送装置,物料输送装置包括自下而上布置的x向驱动模组、顶升模组、平面内调整模组、调平模组和物料载台;物料载台设置在调平模组的顶部,用于承载和定位待曝光的产品;顶升模组、平面内调整模组、调平模组分别用于升降驱动、平面内调节和平面姿态调节,其中,调平模组采用前述的多自由度调整机构;x向驱动模组用于装置在x向的整体驱动,实现物料沿x向的进给和复位。
11、相比现有技术,本发明的有益效果在于:本申请的多自由度调整机构基于球铰原理加气吸定位,结构更紧密空间占用小,为硅片、电池片等物料提供了高精度、高效率的承载及调节定位可能,便于在姿态调整领域、如硅片镀铜图形化领域中的推广应用。
技术特征:
1.一种多自由度调整机构,其特征在于:
2.根据权利要求1所述的多自由度调整机构,其特征在于:
3.根据权利要求2所述的多自由度调整机构,其特征在于:
4.根据权利要求3所述的多自由度调整机构,其特征在于:
5.根据权利要求4所述的多自由度调整机构,其特征在于:
6.根据权利要求4所述的多自由度调整机构,其特征在于:
7.根据权利要求4或6所述的多自由度调整机构,其特征在于:
8.根据权利要求4所述的多自由度调整机构,其特征在于:
9.一种物料输送装置,其特征在于:物料输送装置包括自下而上布置的x向驱动模组(210)、顶升模组(220)、平面内调整模组(230)、调平模组(240)和物料载台(250);
技术总结
本发明提供了一种多自由度调整机构及物料输送装置,涉及姿态调整技术,多自由度调整机构包括第一调整件、第二调整件和锁定单元;锁定单元用于第一调整件和第二调整件多自由度的位置调整后的位置锁定。物料输送装置包括自下而上布置的X向驱动模组、顶升模组、平面内调整模组、调平模组和物料载台;顶升模组、平面内调整模组、调平模组分别用于升降驱动、平面内调节和平面姿态调节,调平模组采用前述的多自由度调整机构。本申请的多自由度调整机构基于球铰原理加气吸定位,结构更紧密空间占用小,为硅片、电池片等物料提供了高精度、高效率的承载及调节定位可能,便于在姿态调整领域、如硅片镀铜图形化领域中的推广应用。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:苏州天准科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!