一种三角架翻身方法与流程
本发明涉及起重机,具体涉及一种三角架翻身方法。
背景技术:
1、在起重机的装配过程中,需要通过吊机将不同的部件吊起逐步进行装配,例如三角架,在对三角架进行吊起安装前,若三角架未以预设的状态放置,则需要先对三角架进行翻身,改变三角架的放置状态。
2、如在中国申请号为202211174001.9,申请日为2022.9.26的专利文献公开了一种吊机的组装方法,其公开对底座、搁置架、三角架和吊臂的吊装,但是其没有公开对三角架进行翻身的方法。
技术实现思路
1、本发明一种三角架翻身方法,在三角架的同时使得三角架翻转后的底部与支撑面平行,改变三角架的放置状态。
2、为达到上述目的,本发明的技术方案是:一种三角架翻身方法,包括以下步骤:
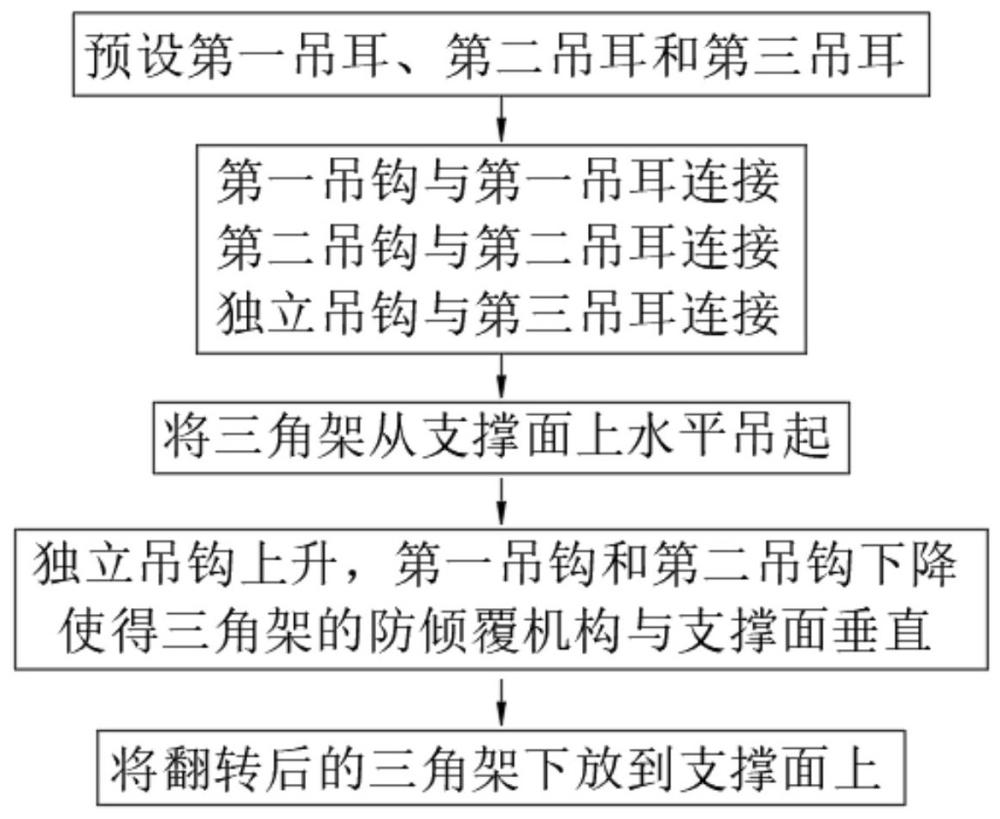
3、s1、在三角架上预设第一吊耳、第二吊耳和第三吊耳,第二吊耳设置在三角架一侧的滑轮架上,第一吊耳设置三角架一侧的后拉杆远离滑轮架的一端,第三吊耳设置在三角架另一侧的前拉杆上;第三吊耳位于第二吊耳与第一吊耳之间。
4、s2、横梁双钩和独立吊钩与防倾覆机构与支撑面平行的三角架连接;横梁双钩的第一吊钩通过钢丝绳与第一吊耳连接,横梁双钩的第二吊钩通过钢丝绳与第二吊耳连接,独立吊钩通过钢丝绳与第三吊耳连接。
5、s3、第一吊钩、第二吊钩和独立吊钩将三角架从支撑面上水平吊起;三角架上升到预设高度后进行s4。
6、s4、独立吊钩上升,第一吊钩和第二吊钩下降,使得三角架翻转;
7、当三角架的防倾覆机构与支撑面垂直,进行s5。
8、s5、停止对三角架翻转,第一吊钩、第二吊钩和独立吊钩同时下降,将翻转后的三角架下放到支撑面上。
9、以上方法,第一吊钩和第二吊钩都与三角架的后拉杆连接,独立吊钩与三角架的前拉杆连接;实现三角架的前拉杆向对后拉杆翻转;同时通过第一吊钩和第二吊钩带动三角架的一侧下降,独立吊钩带动三角架的另一侧上升,使得三角架翻转后的底部与支撑面平行,通过对防倾覆机构与支撑面平行的三角架进行翻转,进行翻转改变三角架的放置状态,方便三角架进行后续安装。
10、进一步的,确定第一吊耳和第二吊耳的方法,包括以下步骤;
11、s1.1、预设第一吊钩的受力f1、第二吊钩的受力f2。
12、s1.2、预设第一吊耳的位置。
13、s1.3、以三角架翻转前的顶部为第一平面,以底座的重心投影到第一平面的位置为原点,建立坐标系,根据第一吊耳的位置确定第一吊耳在坐标系中的坐标,并计算出第一吊耳的坐标与坐标系原点的之间的距离l1。
14、s1.4、通过计算坐标系原点与第二吊耳之间距离l2,确定第二吊耳的位置范围。
15、s1.5、沿第一吊耳的水平方向在后拉杆上根据第二吊耳的位置范围确定第二吊耳在坐标系的坐标;然后通过滑轮架顶部与第一平面之间的距离,确定第二吊耳在滑轮架的位置。
16、以上方法,实现第一吊钩与第二吊钩之间的受力平衡,第一吊耳与坐标系原点的力矩、第二吊耳与坐标系原点的力矩相等;通过第一吊耳与坐标系原点的力矩计算出第二吊耳的位置范围,然后确定第二吊耳在坐标系的坐标,然后再将第二吊耳在坐标系中的坐标转换为在滑轮架上的位置,方法简单。
17、进一步的,确定第三吊耳的方法,包括以下步骤;
18、s1.6、确定第一吊耳与第二吊耳之间的受力中点,确定坐标系原点与受力中点之间的距离l3。
19、s1.7、预设独立吊钩的受力f4;预设受力中点与第三吊耳之间的距离l5。
20、s1.8、通过计算第三吊耳与坐标系原点之间距离l4,确定第三吊耳的位置范围;f3为第一吊钩与第二吊钩的受力之和。
21、s1.9、在前拉杆上根据第三吊耳的位置范围中确定第三吊耳在坐标系的坐标。
22、s1.10、根据三角架翻转前的底部与第一平面之间的距离,确定第三吊耳在前拉杆底部的位置。
23、以上方法,实现横梁双钩与独立吊钩之间的受力平衡,受力中点与坐标系原点的力矩、第三吊耳与坐标系原点的力矩相等;通过受力中点与坐标系原点的力矩计算出第三吊耳的位置范围,然后确定第三吊耳在坐标系的坐标,方法简单。
24、进一步的,s1.5中,确定第二吊耳在坐标系的坐标。具体为,沿第一吊耳的水平方向,后拉杆远离第一吊耳的一端与l2的交点确定第二吊耳在坐标系中的坐标。
25、以上方法,在后拉杆远离第一吊耳的另一端确认第二吊耳的坐标,第二吊耳远离第一吊耳设置,使得三角架能稳定吊起。
26、进一步的,s1.9具体为,通过l4与l5在前拉杆上的交点确定第三吊耳在坐标系中的坐标。通过两个范围的交点确定第三吊耳的坐标,方法简单。
技术特征:
1.一种三角架翻身方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种三角架翻身方法,其特征在于:确定第一吊耳和第二吊耳的方法,包括以下步骤;
3.根据权利要求2所述的一种三角架翻身方法,其特征在于:确定第三吊耳的方法,包括以下步骤;
4.根据权利要求3所述的一种三角架翻身方法,其特征在于:s1.5中,确定第二吊耳在坐标系的坐标,具体为,通过l2与第一吊耳的水平方向的交点确定第二吊耳在坐标系中的坐标。
5.根据权利要求4所述的一种三角架翻身方法,其特征在于:s1.9具体为,通过l4与l5在前拉杆上的交点确定第三吊耳在坐标系中的坐标。
技术总结
本发明提供一种三角架翻身方法,第一吊钩和第二吊钩都与三角架的后拉杆连接,独立吊钩与三角架的前拉杆连接;实现三角架的前拉杆向对后拉杆翻转;同时通过第一吊钩和第二吊钩带动三角架的一侧下降,独立吊钩带动三角架的另一侧上升,使得三角架翻转后的底部与支撑面平行,通过对防倾覆机构与支撑面平行的三角架进行翻转,进行翻转改变三角架的放置状态,方便三角架进行后续安装。
技术研发人员:宋耀祥,焦鹤,赵旭,李研,何中天,罗建华,杨镇廣,覃振峰
受保护的技术使用者:中国船舶集团华南船机有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!