一种双机多吊点抬吊同步检测控制系统及方法与流程
本发明涉及一种双机多吊点抬吊同步控制系统及同步控制方法,特别适用于两台起重机多小车多吊点的抬吊控制,属于起重。
背景技术:
1、近年来随着制造业的快速发展,重载化大型化的负载和日益复杂的吊装环境,对起重吊装设备和吊装技术提出了更高的要求。受到协调能力和负载能力等方面的限制,单台起重设备已不能完全满足当前要求,所以常常需要多台起重机协同吊装作业。但是在实际起吊过程中,易出现控制不同步,重物在起升过程中容易发生偏载,容易发生危险,不利于安全作业。在现有吊装技术中,为了保证起重机械协同起升或行走作业的同步性,需要各起重机操作者通过各自视角观察起重吊重信息和现场情况,通过无线对讲机、手机等移动设备语音沟通;或有指挥人员通过移动设备统一指挥协同作业的起重机操作者。各台起重机操作人员根据各自情况,互相沟通信息再协调做出决策;各自起重机操作人员对同伴的起重状态了解实时性差,安全性差;需要增加指挥人员,增加了人工成本,提高了劳动强度。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术存在的缺陷,提供一种双机多吊点抬吊同步控制系统及同步控制方法,防止吊重发生偏载,提高工作效率和吊装安全性。
2、为解决这一技术问题,本发明提供了一种双机多吊点抬吊同步控制系统,包括双机多吊点抬吊作业系统和人机交互系统,所述双机多吊点抬吊作业系统包括主起重机、从起重机,卷扬机一、卷扬机二、卷扬机三、卷扬机四和双机多吊点抬吊,人机交互系统包括通讯模块、重量检测装置、高度检测装置、水平检测装置和主控制器模块,所述主起重机和从起重机上分别设置主/从起重机选择开关,卷扬机一和卷扬机二布置在主起重机上,卷扬机三和卷扬机四布置在从起重机上;所述重量检测装置和高度检测装置均为四套,分别安装在卷扬机一、卷扬机二、卷扬机三和卷扬机四上;所述双机多吊点抬吊上设有水平检测装置;所述主起重机和从起重机均设有主控制器模块,各起重机通过通讯模块建立通信连接,获取各个检测装置采集到的位置信号以及起升和行走工况信息、实现各个起重机之间的数据共享和传输,统一协调发出指令,指挥各个吊钩同步作业。
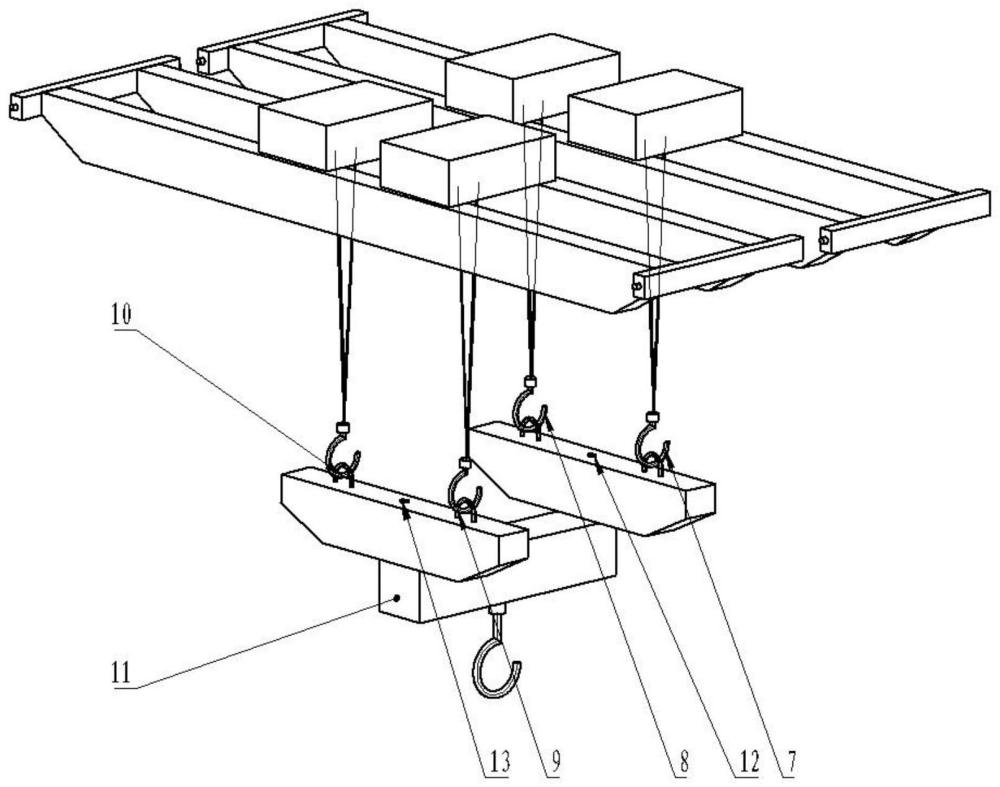
3、所述双机多吊点抬吊包括吊钩一、吊钩二、吊钩三、吊钩四、抬吊梁、水平检测装置一和水平检测装置二,卷扬机一、卷扬机二、卷扬机三和卷扬机四分别对应吊钩一、吊钩二、吊钩三和吊钩四,抬吊梁挂在四个吊钩下方,水平检测装置一和水平检测装置二分别安装在抬吊梁的两端,用于检测抬吊梁两端的水平度。
4、所述通讯模块用于实现两台起重机之间的数据传输和指令传递,各个起重机通过线缆连接、或无线网桥建立通信连接;双机多钩协同作业时,通过无线通信模块实现多机数据互联,通过人机交互系统实现多机作业模式与单机模式切换,通过主起重机实时采集主起重机和从起重机的吊钩起升高度、额定吊重量、实际吊重量起升工况;综合计算对比,当出现较大偏差时,自动减速并停止动作,并声光报警提示。
5、所述重量检测装置包括两个重量传感器、通讯卡、数据采集卡和信号处理单元,重量传感器固定在卷扬机的平衡滑轮钢丝绳上,用于采集对应卷扬机吊钩的实时重量,并与主控制模块及人机交互系统通讯,重量传感器采集当前吊钩的吊重,数据采集卡采集当前重量,信号处理单元将采集到重量信号转换为标准的数字量信号传送至主控制模块的cpu处理器,进而控制起升机构及制动器的动作。
6、所述高度检测装置包括两个高度编码器、数据采集卡和信号处理单元,高度编码器与卷扬机的卷筒轴同心连接,安装于卷筒尾部,测量卷筒的旋转圈数并将圈数转换成吊钩垂直上下的高度数值,并与主控制模块及人机交互系统通讯,主控制模块对其进行控制,人机交互系统对当前状态进行显示,超限时进行声光报警且有控制信号输出。
7、所述水平检测装置包括水平检测传感器、数据采集卡和信号处理单元,水平检测装置包括两套,分别设置在抬吊梁的两端、用于检测抬吊梁倾斜角度,将所采集的角度信号通过信号处理器转换为标准的数字量信号,并将信号传送至主控制器模块。
8、所述主控制器模块包括基于plc的cpu处理器、数字量输入输出模块、模拟量输入输出模块ai/ao、存储单元、通讯单元及电源,所述cpu处理器和数字量输入输出模块、模拟量输入输出模块ai/ao均安装在电气控制柜内,模拟量输入输出模块ai/ao接收高度检测装置标准电流信号,进而控制起升机构及制动器的动作。
9、本发明还提供了一种利用上述所述的双机多吊点抬吊同步控制系统进行同步控制的方法,包括如下步骤:
10、1)首先给整机送电,分别试操作主起重机和从起重机各机构动作是否正常,若正常,开始进行协同抬吊作业;操作主起重机操作台的并车请求按钮,查看从起重机的并车允许信号是否响应,若正常响应,操纵主起重机联动台上的起升机构主令控制器,进行起升机构起升操作,同时实时查看主起重机与从起重机通讯是否正常,如都满足,继续进行操作;
11、2)起吊过程中,当四个吊钩抬吊的重物距离地面一定高度时,人机交互系统通过四个重量传感器获取的主起重机上的吊钩一、吊钩二和从起重机上的吊钩三、吊钩四的当前吊装的重物的重量,当主起重机和从起重机双机并车抬吊时,两台起重机系统人机交互系统均能对数据进行处理计算对比,当两台起重机的四个吊钩其中任何两个吊钩上的重物的重量偏差在偏差预设值范围内时,可继续进行操作双机抬吊作业;
12、3)操作过程中,人机交互系统通过与高度编码器通讯的方式获取当前主起重机的吊钩一、吊钩二和从起重机的吊钩三、吊钩四的当前高度,当主起重机和从起重机双机并车抬吊时,两台起重机系统人机交互系统均能对数据进行处理计算对比,当两台车的四个吊钩其中任何两个吊钩的高度偏差在偏差预设值范围内时,可继续进行操作双机抬吊作业;
13、4)位于抬吊梁两端的水平检测装置一和水平检测装置二检测抬吊梁的水平度,水平度数值被数据采集装置传输到处理器分析处理后,如不超差,抬吊继续进行。
14、有益效果:本发明的双机多吊点抬吊同步控制系统及同步控制方法,通过通信连接实现了各个起重机之间的数据,由主车统一指挥,统一操作,可实现多机同步吊装,保证吊重位置相对稳定,防止吊重发生偏载,保证各个起重机在吊装作业过程中分担的吊重均匀分配,减少失稳或倾翻等危险的可能性,可提高工作效率和吊装安全性,同时减少人工成本,减少劳动强度。
技术特征:
1.一种双机多吊点抬吊同步控制系统,其特征在于:包括双机多吊点抬吊作业系统和人机交互系统,所述双机多吊点抬吊作业系统包括主起重机(1)、从起重机(2),卷扬机一(3)、卷扬机二(4)、卷扬机三(5)、卷扬机四(6)和双机多吊点抬吊,人机交互系统包括通讯模块、重量检测装置、高度检测装置、水平检测装置和主控制器模块,所述主起重机(1)和从起重机(2)上分别设置主/从起重机选择开关,卷扬机一(3)和卷扬机二(4)布置在主起重机(1)上,卷扬机三(5)和卷扬机四(6)布置在从起重机(2)上;所述重量检测装置和高度检测装置均为四套,分别安装在卷扬机一(3)、卷扬机二(4)、卷扬机三(5)和卷扬机四(6)上;所述双机多吊点抬吊上设有水平检测装置;所述主起重机(1)和从起重机(2)均设有主控制器模块,各起重机通过通讯模块建立通信连接,获取各个检测装置采集到的位置信号以及起升和行走工况信息、实现各个起重机之间的数据共享和传输,统一协调发出指令,指挥各个吊钩同步作业。
2.根据权利要求1所述的双机多吊点抬吊同步控制系统,其特征在于:所述双机多吊点抬吊包括吊钩一(7)、吊钩二(8)、吊钩三(9)、吊钩四(10)、抬吊梁(11)、水平检测装置一和水平检测装置二,卷扬机一(3)、卷扬机二(4)、卷扬机三(5)和卷扬机四(6)分别对应吊钩一(7)、吊钩二(8)、吊钩三(9)和吊钩四(10),抬吊梁(11)挂在四个吊钩下方,水平检测装置一(12)和水平检测装置二(13)分别安装在抬吊梁(11)的两端,用于检测抬吊梁(11)两端的水平度。
3.根据权利要求1所述的双机多吊点抬吊同步控制系统,其特征在于:所述通讯模块用于实现两台起重机之间的数据传输和指令传递,各个起重机通过线缆连接、或无线网桥建立通信连接;双机多钩协同作业时,通过无线通信模块实现多机数据互联,通过人机交互系统实现多机作业模式与单机模式切换,通过主起重机(1)实时采集主起重机(1)或从起重机(2)的吊钩起升高度、额定吊重量、实际吊重量起升工况;综合计算对比,当出现较大偏差时,自动减速并停止动作,并声光报警提示。
4.根据权利要求1所述的双机多吊点抬吊同步控制系统,其特征在于:所述重量检测装置包括两个重量传感器(14)、通讯卡、数据采集卡和信号处理单元,重量传感器(14)固定在卷扬机的平衡滑轮钢丝绳上,用于采集对应卷扬机吊钩的实时重量,并与主控制模块及人机交互系统通讯,重量传感器(14)采集当前吊钩的吊重,数据采集卡采集当前重量,信号处理单元将采集到重量信号转换为标准的数字量信号传送至主控制模块的cpu处理器,进而控制起升机构及制动器的动作。
5.根据权利要求1所述的双机多吊点抬吊同步控制系统,其特征在于:所述高度检测装置包括两个高度编码器(15)、数据采集卡和信号处理单元,高度编码器(15)与卷扬机的卷筒轴同心连接,安装于卷筒尾部,测量卷筒的旋转圈数并将圈数转换成吊钩垂直上下的高度数值,并与主控制模块及人机交互系统通讯,主控制模块对其进行控制,人机交互系统对当前状态进行显示,超限时进行声光报警且有控制信号输出。
6.根据权利要求1所述的双机多吊点抬吊同步控制系统,其特征在于:所述水平检测装置包括水平检测传感器、数据采集卡和信号处理单元,水平检测装置包括两套,分别设置在抬吊梁(11)的两端、用于检测抬吊梁倾斜角度,将所采集的角度信号通过信号处理器转换为标准的数字量信号,并将信号传送至主控制器模块。
7.根据权利要求1-7任一项所述的双机多吊点抬吊同步控制系统,其特征在于:所述主控制器模块包括基于plc的cpu处理器、数字量输入输出模块、模拟量输入输出模块ai/ao、存储单元、通讯单元及电源,所述cpu处理器和数字量输入输出模块、模拟量输入输出模块ai/ao均安装在电气控制柜内,模拟量输入输出模块ai/ao接收高度和重量检测装置标准电流信号,进而控制起升机构及制动器的动作。
8.一种利用权利要求1-7任一项所述的同步控制系统的控制方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种双机多吊点抬吊同步控制系统及方法,所述控制系统包括双机多吊点抬吊作业系统和人机交互系统,所述双机多吊点抬吊作业系统包括主/从起重机,四台卷扬机和双机多吊点抬吊,人机交互系统包括通讯模块、重量检测装置、高度检测装置、水平检测装置和主控制器模块,卷扬机一和卷扬机二布置在主起重机上,卷扬机三和卷扬机四布置在从起重机上;重量检测装置和高度检测装置均为四套,分别安装在四台卷扬机上;双机多吊点抬吊上设有水平检测装置;主/从起重机均设有主控制器模块,各起重机通过通讯模块建立通信连接。本发明通过通信连接各起重机之间的数据,可实现多机同步吊装,保证吊重位置相对稳定,提高了工作效率和安全性。
技术研发人员:夏文艳,任师道,许建新,王进峰,赵连远,宗浩
受保护的技术使用者:山东丰汇设备技术有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!