定位方法、装置、系统及光伏阵列半成品安装设备与流程
本申请属于定位,涉及变量测量或检测技术,尤其涉及一种基于距离测量以及位置检测的定位方法、装置、系统及光伏阵列半成品安装设备。
背景技术:
1、在光伏太阳能发电板的安装过程中,安装设备需要到达实施作业点(即目标安装位置)进行安装作业。然而,相关技术中,在安装设备向实施作业点移动的过程中会出现由于其驱动组件不同步而打滑的情况,导致安装设备无法稳定到达实施作业点,从而影响安装作业。
技术实现思路
1、本申请实施例提供一种定位方法、装置、系统及光伏阵列半成品安装设备,能够减少吊架小车打滑的情况。
2、第一方面,本申请实施例提供一种定位方法,应用于吊架小车的定位,所述吊架小车的两侧均设置有用于驱动所述吊架小车的驱动组件;
3、所述方法包括:
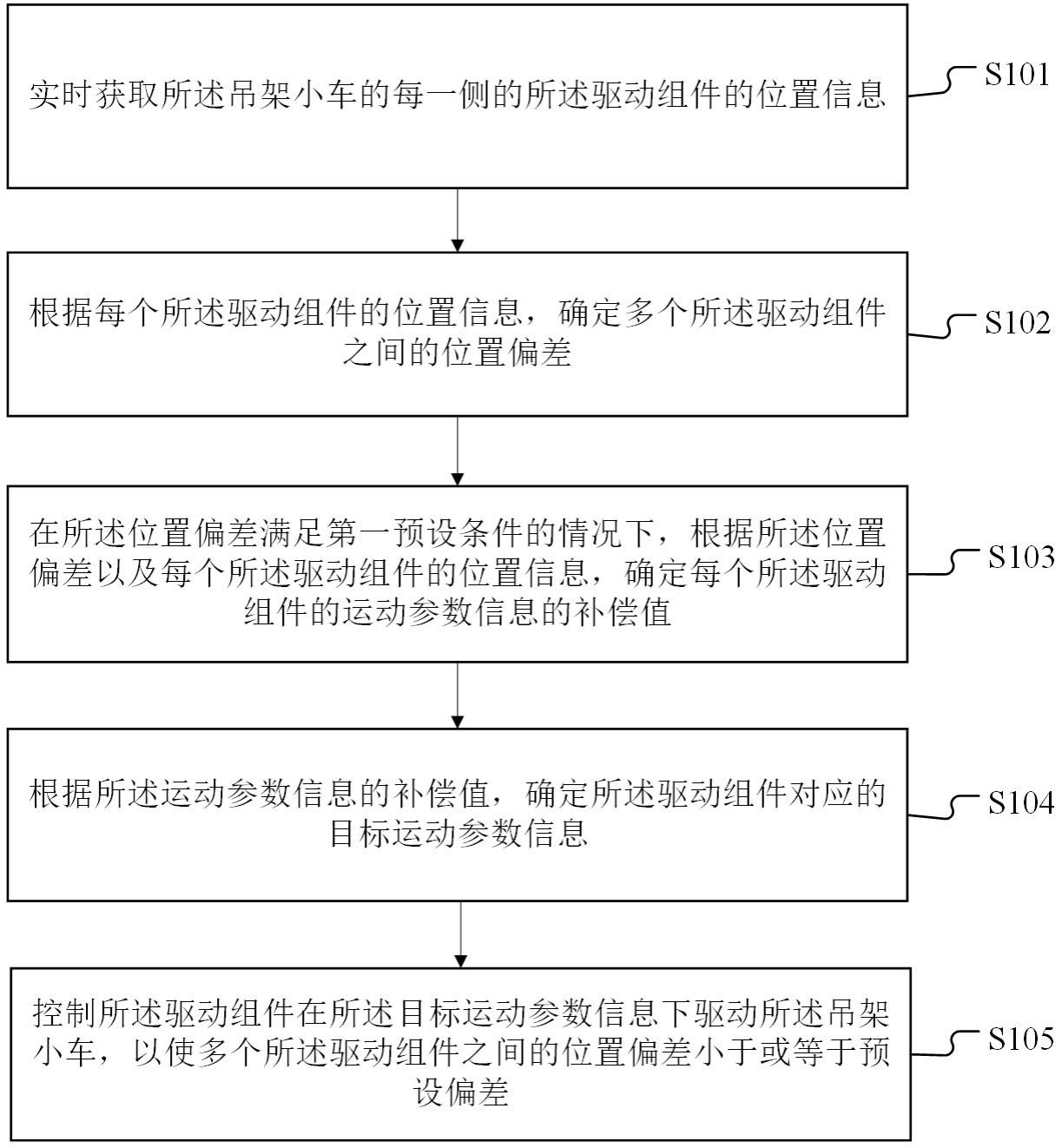
4、实时获取所述吊架小车的每一侧的所述驱动组件的位置信息;
5、根据每个所述驱动组件的位置信息,确定多个所述驱动组件之间的位置偏差;
6、在所述位置偏差满足第一预设条件的情况下,根据所述位置偏差以及每个所述驱动组件的位置信息,确定每个所述驱动组件的运动参数信息的补偿值;
7、根据所述运动参数信息的补偿值,确定所述驱动组件对应的目标运动参数信息;
8、控制所述驱动组件在所述目标运动参数信息下驱动所述吊架小车,以使多个所述驱动组件之间的位置偏差小于或等于预设偏差。
9、第二方面,本申请实施例提供了一种定位装置,应用于吊架小车的定位,所述吊架小车的两侧均设置有用于驱动所述吊架小车的驱动组件;
10、所述装置包括:
11、获取模块,用于实时获取所述吊架小车的每一侧的所述驱动组件的位置信息;
12、第一确定模块,用于根据每个所述驱动组件的位置信息,确定多个所述驱动组件之间的位置偏差;
13、第二确定模块,用于在所述位置偏差满足第一预设条件的情况下,根据所述位置偏差以及每个所述驱动组件的位置信息,确定每个所述驱动组件的运动参数信息的补偿值;
14、第三确定模块,用于根据所述运动参数信息的补偿值,确定所述驱动组件对应的目标运动参数信息;
15、控制模块,用于控制所述驱动组件在所述目标运动参数信息下驱动所述吊架小车,以使多个所述驱动组件之间的位置偏差小于或等于预设偏差。
16、第三方面,本申请实施例提供了一种定位系统,应用于吊架小车的定位,所述吊架小车的两侧均设置有用于驱动所述吊架小车的驱动组件;
17、所述定位系统包括:位置检测装置和控制装置;
18、所述位置检测装置,用于检测所述吊架小车的实时位置和所述驱动组件的位置信息;
19、所述控制装置与所述位置检测装置和所述驱动组件连接,用于执行如第一方面的任一项实施例中所述的定位方法。
20、第四方面,本申请实施例提供了一种光伏阵列半成品安装设备,所述光伏阵列半成品安装设备包括主车、吊具、吊架小车和如第三方面的任一项实施例中所述的定位系统;
21、所述主车,包括竖向支撑组件、横向支撑组件及行走机构组件,所述横向支撑组件承载于所述竖向支撑组件沿竖向的一侧 ,所述行走机构组件设置于所述竖向支撑组件沿竖向的另一侧;
22、所述吊架小车,滑动连接于所述主车上,用于连接所述吊具。
23、本申请实施例的定位方法、装置、系统及光伏阵列半成品安装设备,应用于吊架小车的定位方法通过实时获取吊架小车的每一侧的驱动组件的位置信息,以根据位置信息确定多个驱动组件之间的位置偏差,并在位置偏差满足预设条件的情况下,确定驱动组件对应的目标运动参数信息,以控制驱动组件在目标运动参数信息下驱动吊架小车,使得多个驱动组件之间的位置偏差小于或等于预设偏差,即实现多个驱动组件在一定误差范围内保持同步,从而能够减少吊架小车打滑的情况,实现吊架小车稳定移动,进而满足光伏阵列半成品安装过程中的安装作业要求。
技术特征:
1.一种定位方法,其特征在于,应用于吊架小车的定位,所述吊架小车的两侧均设置有用于驱动所述吊架小车的驱动组件;
2.根据权利要求1所述的方法,其特征在于,所述第一预设条件包括所述位置偏差大于第一预设阈值且小于第二预设阈值的持续时长大于第一时长。
3.根据权利要求1所述的方法,其特征在于,所述运动参数信息的补偿值包括速度补偿值;
4.根据权利要求3所述的方法,其特征在于,所述目标运动参数信息包括目标运动速率;
5.根据权利要求3所述的方法,其特征在于,所述预设位置条件包括下述任一项:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述根据每个所述驱动组件的位置信息,确定多个所述驱动组件之间的位置偏差之后,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述第二预设条件为所述位置偏差大于或等于第二预设阈值的持续时长大于第二时长。
8.一种定位装置,其特征在于,应用于吊架小车的定位,所述吊架小车的两侧均设置有用于驱动所述吊架小车的驱动组件;
9.一种定位系统,其特征在于,应用于吊架小车的定位,所述吊架小车的两侧均设置有用于驱动所述吊架小车的驱动组件;
10.根据权利要求9所述的系统,其特征在于,所述吊架小车沿双轨道行走,所述位置检测装置设置在所述双轨道的每条轨道上。
11.根据权利要求10所述的系统,其特征在于,所述位置检测装置为设置在轨道上的磁尺。
12.一种光伏阵列半成品安装设备,其特征在于,所述光伏阵列半成品安装设备包括主车、吊具、吊架小车和权利要求9-11任一项所述的定位系统;
13.根据权利要求12所述的光伏阵列半成品安装设备,其特征在于,所述吊架小车包括沿竖向层叠设置的两个以上的吊架,相邻两层的所述吊架沿不同的方向可移动设置;所述吊具与最下层的所述吊架连接,用于对光伏阵列半成品进行吊装。
技术总结
本申请公开了一种定位方法、装置、系统及光伏阵列半成品安装设备,涉及变量测量或检测技术。所述定位方法包括:实时获取吊架小车的每一侧的驱动组件的位置信息;根据每个驱动组件的位置信息,确定多个驱动组件之间的位置偏差;在位置偏差满足第一预设条件的情况下,根据位置偏差以及每个驱动组件的位置信息,确定每个驱动组件的运动参数信息的补偿值;根据运动参数信息的补偿值,确定驱动组件对应的目标运动参数信息;控制驱动组件在目标运动参数信息下驱动吊架小车,以使多个驱动组件之间的位置偏差小于或等于预设偏差。根据本申请实施例,能够实现多个驱动组件在一定误差范围内保持同步,减少吊架小车打滑,实现其稳定移动。
技术研发人员:请求不公布姓名,请求不公布姓名
受保护的技术使用者:上海博珖机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!