一种多路阀中位识别机构、叉车及其运行的控制方法与流程
本发明涉及叉车领域,具体涉及一种多路阀中位识别机构以及具有该多路阀中位识别机构的叉车以及叉车运行的控制方法。
背景技术:
1、叉车是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆。基于操作安全需求,要求操作者返回到正常操作位置后,从静止开始的动力运行应只从中位激活时才发生。若当操作者不在正常操作位置拨动操作杆,并突然返回操作位置,这时如果没有中位识别,那么将触发液压系统动作,导致叉车的门架运动,对在车子周边的人员可能造成危险。
2、目前多路阀中位识别系统中,大多是通过在多路阀的每个阀杆都安装一个电位计,以识别阀杆的中位位置,如此设置,成本较高,需要较大的安装空间,在一些空间比较紧凑的地方,电位计无法安装。
技术实现思路
1、为此,本发明为解决上述问题,提供一种多路阀中位识别机构以及具有该多路阀中位识别机构的叉车。
2、为实现上述目的,本发明提供的技术方案如下:
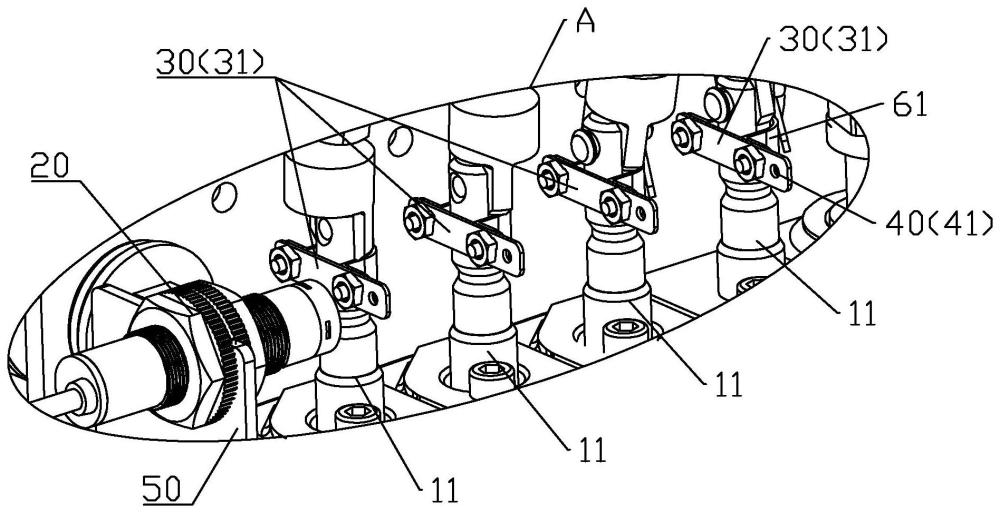
3、一种多路阀中位识别机构,包括出射光线的传感器和多个遮光件,所述传感器固定安装在多路阀的一侧,多个遮光件一一装配在多路阀的多个阀杆中并与阀杆联动;所述遮光件上开设有透光部,所述多路阀的多个阀杆均处于中位位置时,多个遮光件的透光部处在同一条直线上以供传感器的光线穿过;所述多路阀的任何一个阀杆不在中位位置时,不在中位位置的阀杆上的遮光件遮住传感器的光线而触发传感器。
4、进一步的,所述多路阀的一侧边固定有固定支架,所述固定支架为l型支架,包括垂直设置横向板和竖向板,所述横向板固定在多路阀的阀体上,所述竖向板开设有开口向上的固定缺口,所述传感器固定插设在固定缺口内。
5、进一步的,多路阀中位识别机构还包括u型抱箍,所述u型抱箍抱持在阀杆上,所述u型抱箍的两端设置有相平齐的固定部,所述遮光件为长条形的遮光片,所述遮光片固定装配在u型抱箍两端的固定部上。
6、进一步的,所述阀杆上设置有上下两个插销,所述遮光件为l形板,包括相连接的竖向连接板和横向连接板,所述竖向连接板开设有上下两个插销孔,两个插销还分别插设在竖向连接板的两个插销孔内而固定所述遮光件,所述横向连接板向外延伸,所述透光部设置在横向连接板的末端。
7、进一步的,所述遮光件为y形架,包括u形夹持部和连接在u形夹持部并反向延伸的直段部,所述u形夹持部套在阀杆上,u形夹持部的两端连接有紧固件,通过紧固件的配合而使u形夹持部夹紧所述阀杆,所述透光部设置在直段部的末端。
8、进一步的,所述透光部为透光孔或透光缺口。
9、进一步的,所述传感器为光电传感器或能够感应距离的激光传感器。
10、一种叉车,至少包括上述所述的多路阀中位识别机构。
11、一种叉车运行的控制方法,包括如下步骤:
12、a1,钥匙开关上电之后,检测座椅开关处于得电状态或失电状态,若处于失电状态,则结束;若处于得电状态则进入步骤a2;
13、a2,通过上述所述的多路阀中位识别机构判定多路阀中位开关信号处于得电状态或失电状态;多路阀中位开关信号处于失电状态是指多路阀的多个阀杆都处于中位位置,传感器未被触发;多路阀中位开关信号处于得电状态是指多路阀的多个阀杆有不处于中位位置的情况,传感器被触发;若判定多路阀中位开关信号处于失电状态,控制安全阀得电,进行液压做功;若判定多路阀中位开关信号处于得电状态,安全阀失电,液压无动作。
14、进一步的,当所述传感器为能够感应距离的激光传感器时,步骤a2在控制安全阀得电的情况下,进入步骤a3:多路阀中位识别机构对多路阀进行第二次检测,判断多路阀位移信号,即当操作人员操作手柄以带动其中一个阀杆从中位位置切换时,激光传感器感应距离并输出给叉车控制系统,叉车控制系统根据信息确定是哪一个阀杆进行切换,并控制叉车的电机输出不同的转速或者功率,以实现机械阀的转速触发。
15、通过本发明提供的技术方案,具有如下有益效果:
16、1.本方案在多路阀的一侧设置传感器,同时在每个阀杆上安装带透光部的遮光件,通过阀杆带动遮光件运动来识别阀杆是否在中位位置,具有成本低、安装简单且空间布局灵活的特点,紧凑空间也能够很好的安装。
17、2.当传感器为能够感应距离的激光传感器时,不仅能够用来识别阀杆是否在中位位置,也可以在当完成中位判断后,此逻辑也作为叉车机械阀的转速触发信号。这种布局具有安装简单,减少故障率等优点。
技术特征:
1.一种多路阀中位识别机构,其特征在于:包括出射光线的传感器和多个遮光件,所述传感器固定安装在多路阀的一侧,多个遮光件一一装配在多路阀的多个阀杆中并与阀杆联动;所述遮光件上开设有透光部,所述多路阀的多个阀杆均处于中位位置时,多个遮光件的透光部处在同一条直线上以供传感器的光线穿过;所述多路阀的任何一个阀杆不在中位位置时,不在中位位置的阀杆上的遮光件遮住传感器的光线而触发传感器。
2.根据权利要求1所述的多路阀中位识别机构,其特征在于:所述多路阀的一侧边固定有固定支架,所述固定支架为l型支架,包括垂直设置横向板和竖向板,所述横向板固定在多路阀的阀体上,所述竖向板开设有开口向上的固定缺口,所述传感器固定插设在固定缺口内。
3.根据权利要求1所述的多路阀中位识别机构,其特征在于:多路阀中位识别机构还包括u型抱箍,所述u型抱箍抱持在阀杆上,所述u型抱箍的两端设置有相平齐的固定部,所述遮光件为长条形的遮光片,所述遮光片固定装配在u型抱箍两端的固定部上。
4.根据权利要求1所述的多路阀中位识别机构,其特征在于:所述阀杆上设置有上下两个插销,所述遮光件为l形板,包括相连接的竖向连接板和横向连接板,所述竖向连接板开设有上下两个插销孔,两个插销还分别插设在竖向连接板的两个插销孔内而固定所述遮光件,所述横向连接板向外延伸,所述透光部设置在横向连接板的末端。
5.根据权利要求1所述的多路阀中位识别机构,其特征在于:所述遮光件为y形架,包括u形夹持部和连接在u形夹持部并反向延伸的直段部,所述u形夹持部套在阀杆上,u形夹持部的两端连接有紧固件,通过紧固件的配合而使u形夹持部夹紧所述阀杆,所述透光部设置在直段部的末端。
6.根据权利要求1所述的多路阀中位识别机构,其特征在于:所述透光部为透光孔或透光缺口。
7.根据权利要求1所述的多路阀中位识别机构,其特征在于:所述传感器为光电传感器或能够感应距离的激光传感器。
8.一种叉车,其特征在于,至少包括上述权利要求1-7任一所述的多路阀中位识别机构。
9.一种叉车运行的控制方法,其特征在于:包括如下步骤:
10.根据权利要求9所述的叉车运行的控制方法,其特征在于:当所述传感器为能够感应距离的激光传感器时,步骤a2在控制安全阀得电的情况下,进入步骤a3:多路阀中位识别机构对多路阀进行第二次检测,判断多路阀位移信号,即当操作人员操作手柄以带动其中一个阀杆从中位位置切换时,激光传感器感应距离并输出给叉车控制系统,叉车控制系统根据信息确定是哪一个阀杆进行切换,并控制叉车的电机输出不同的转速或者功率,以实现机械阀的转速触发。
技术总结
本发明提供一种多路阀中位识别机构、叉车及其运行的控制方法,多路阀中位识别机构括出射光线的传感器和多个遮光件,所述传感器固定安装在多路阀的一侧,多个遮光件一一装配在多路阀的多个阀杆中并与阀杆联动;所述遮光件上开设有透光口,所述多路阀的多个阀杆均处于中位位置时,多个遮光件的透光口处在同一条直线上以供传感器的光线穿过;所述多路阀的任何一个阀杆不在中位位置时,不在中位位置的阀杆上的遮光件遮住传感器的光线而触电传感器。具有成本低、安装简单且空间布局灵活的特点,紧凑空间也能够很好的安装。
技术研发人员:林锋岩,陈泽山,林鹏腾
受保护的技术使用者:林德(中国)叉车有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!