智能医疗垃圾处理系统的制作方法
本申请涉及垃圾处理,尤其涉及一种智能医疗垃圾处理系统。
背景技术:
1、日常的医疗垃圾处理流程为,首先需要实验员自行密封处理医疗垃圾,处理的过程中与医疗垃圾近距离接触,可能存在感染的风险,以及个别实验员处理方式不到位可能会存在泄露的风险;医疗垃圾密封完成后需要实验员进行称重、贴标签、写记录、搬运、分类、装箱等一系列操作,每日重复性的垃圾处理流程耗费了人力、时间,也降低了实验员工作的积极性。
2、目前现有的技术:主要包括两类,一类为医疗垃圾打包机器,工作原理几乎一致,但需要人工放置扎带;另一类为垃圾处理装置,将垃圾丢入机器后进行绞碎、打包等,此技术并不适用于大部分场景,医疗垃圾应由有资质、合规的垃圾处理公司运回深度处理。
3、主要的技术问题如下:
4、1)耗费人力:医疗垃圾处理的过程最繁琐之处是需要多次搬运、分类放置垃圾袋,现有的方案只能够解决密封打包垃圾的步骤,不能从根源上解放人力。
5、2)效率低、无法实现自动化:工作中需要填写很多日常记录,人工填写可能存在填写错误、虚报数据等情况。
6、3)过多的人工参与打包过程会对工作人员的安全造成威胁。
技术实现思路
1、为了解决上述问题,本申请提出一种智能医疗垃圾处理系统,分别通过夹持机构、旋转机构、捆扎机构及推送机构对垃圾袋进行打包并推送到垃圾分类存储箱内,无需工作人员多次搬运及打包,避免了感染的风险,提高安全性,且通过机器运作,提高了工作效率。
2、本申请通过以下技术方案实现的:
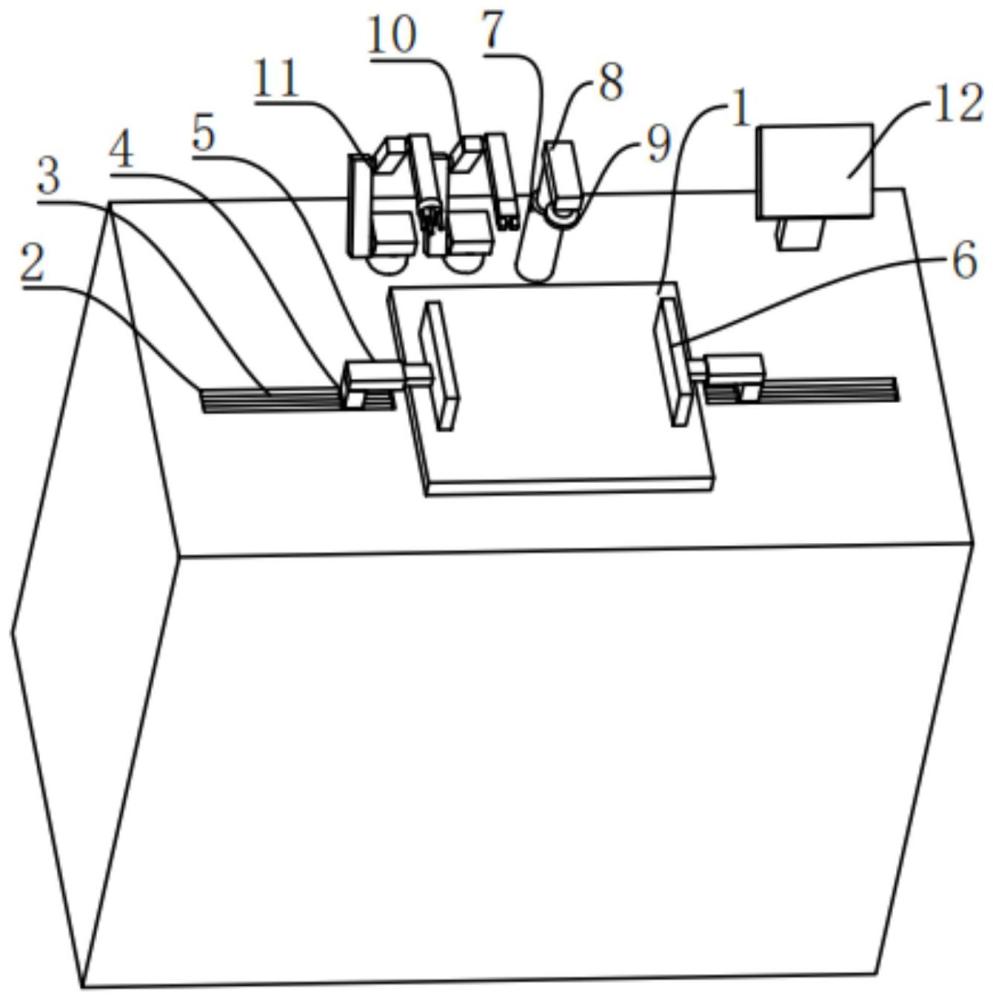
3、本申请提出一种智能医疗垃圾处理系统,包括操作平台、夹持机构、旋转机构、捆扎机构、定位机构、推送机构和垃圾分类存储箱;
4、所述操作平台用于放置装有医疗垃圾的垃圾袋;所述夹持机构用于夹紧放置在操作平台上的所述垃圾袋;所述旋转机构用于收紧垃圾袋的袋口;所述捆扎机构用于捆扎收紧后的垃圾袋的袋口;所述定位机构用于将捆扎后的垃圾袋移动到所述推送机构与垃圾分类存储箱之间,以使推送机构将垃圾袋推送入垃圾分类存储箱内。
5、进一步的,所述夹持机构包括两个用于夹持垃圾袋的夹持组件,两个所述夹持组件设置在操作平台的相对两侧,所述夹持组件包括滑槽、驱动电机、驱动丝杆、滑块、第一电动推杆、连接架、角度电机及压板,所述驱动电机设置在滑槽的一端,所述驱动丝杆设置在滑槽内,所述驱动丝杆的一端与驱动电机的输出端连接,所述驱动丝杆的另一端与滑槽内侧壁转动连接,所述滑块设置在驱动丝杆上,并与驱动丝杆螺纹连接,所述第一电动推杆的一端与滑块连接,所述第一电动推杆的另一端与所述连接架连接,所述角度电机设置在连接架的一端,所述连接架上设置有转动杆,所述转动杆的一端与角度电机的输出端连接,所述转动杆的另一端与连接架转动连接,所述压板的一端与转动杆连接。
6、进一步的,所述旋转机构包括电动伸缩杆、旋转支架、公转电机、转盘、自转电机及夹子,所述电动伸缩杆的输出端与所述旋转支架连接,所述公转电机与旋转支架远离电动伸缩杆的一端连接,所述转盘与公转电机的输出端连接,所述转盘远离公转电机的一侧表面上连接有多个所述自转电机,所述自转电机的输出端上连接有所述夹子。
7、进一步的,所述捆扎机构包括第一机械臂和第二机械臂,所述第一机械臂包括机械臂段一、机械臂段二、机械臂段三、第一气缸、第一夹块及第二夹块,所述机械臂段一的一端与所述机械臂段二的一端活动连接,所述机械臂段二远离机械臂段一的一端与机械臂段三的一端活动连接,所述机械臂段三远离机械臂段二的一端与第一气缸连接,所述第一夹块及所述第二夹块分别与第一气缸的输出端连接,所述第二机械臂包括机械臂段四、机械臂段五、机械臂段六及机械手爪,所述机械臂段四的一端与所述机械臂段五的一端活动连接,所述机械臂段五远离机械臂段四的一端与机械臂段六的一端活动连接,所述机械臂段六远离机械臂段五的一端与所述机械手爪连接。
8、进一步的,所述定位机构包括升降组件及第一移动组件,所述升降组件包括电动升降杆,所述电动升降杆的输出端与操作平台连接,所述第一移动组件包括第一滑轨、第一移动电机、第一丝杆及第一移动块,所述第一移动电机设置在第一滑轨的一端,所述第一丝杆设置在第一滑轨内,所述第一丝杆的一端与第一移动电机的输出端连接,所述第一丝杆的另一端与第一滑轨转动连接,所述第一移动块设置在第一丝杆上,并与第一丝杆螺纹连接,所述第一移动块与电动升降杆远离操作平台的一端连接。
9、进一步的,所述推送机构包括第二移动组件及推送组件,所述第二移动组件包括第二滑轨、第二移动电机、第二丝杆及第二移动块,所述第二滑轨与第一滑轨平行设置,所述第二移动电机设置在第二滑轨的一端,所述第二丝杆设置在第二滑轨内,所述第二丝杆的一端与第二移动电机的输出端连接,所述第二丝杆的另一端与第二滑轨转动连接,所述第二移动块设置在第二丝杆上,并与第二丝杆螺纹连接,所述推送组件包括立柱、第二电动推杆及推板,所述立柱的一端与第二移动块连接,所述立柱的另一端与第二电动推杆连接,所述第二电动推杆的输出端与推板连接。
10、进一步的,所述垃圾分类存储箱包括箱体及回收桶,所述箱体内设有多个容置腔,多个所述容置腔内分别放置有所述回收桶,每个容置腔上开设有投送口,所述投送口与推板位于同一水平线上,所述投送口上活动连接有盖板。
11、进一步的,所述系统还包括输送机构,所述输送机构位于容置腔内,所述输送机构包括输送电机、主动滚筒、从动滚筒及输送带,所述输送电机的输出端与主动滚筒连接,所述主动滚筒通过所述输送带与所述从动滚筒连接,所述回收桶放置在输送带上。
12、进一步的,所述系统还包括称重机构,所述称重机构包括称重传感器,所述称重传感器设置在操作平台下侧,所述称重传感器与操作平台连接。
13、进一步的,所述系统还包括控制机构,所述控制机构包括控制面板、读卡器、摄像头及标签识别器,所述读卡器、摄像头及标签识别器均集成在所述控制面板内。
14、本申请的有益效果:(1)本发明分别通过夹持机构、旋转机构、捆扎机构及推送机构对垃圾袋进行打包并推送到垃圾分类存储箱内,无需工作人员多次搬运及打包,避免了感染的风险,提高安全性,且通过机器运作,提高了工作效率。
15、(2)本发明的系统能自动生成的各类记录,包括通过刷卡/刷脸生成对应时间、重量、操作人的《医疗垃圾处理记录》,系统识别到高压垃圾标签以及高压指示卡后能够生成对应的《医疗垃圾高压灭菌记录》,并且系统能够储存以往的垃圾处理数据方便随时精准调取,在与医疗垃圾处理公司对接转运时能够出具相应时间段的垃圾数量、重量的清单,便于后续的结算工作。
技术特征:
1.一种智能医疗垃圾处理系统,其特征在于,包括操作平台、夹持机构、旋转机构、捆扎机构、定位机构、推送机构和垃圾分类存储箱;
2.根据权利要求1所述的智能医疗垃圾处理系统,其特征在于,所述夹持机构包括两个用于夹持垃圾袋的夹持组件,两个所述夹持组件设置在操作平台的相对两侧,所述夹持组件包括滑槽、驱动电机、驱动丝杆、滑块、第一电动推杆、连接架、角度电机及压板,所述驱动电机设置在滑槽的一端,所述驱动丝杆设置在滑槽内,所述驱动丝杆的一端与驱动电机的输出端连接,所述驱动丝杆的另一端与滑槽内侧壁转动连接,所述滑块设置在驱动丝杆上,并与驱动丝杆螺纹连接,所述第一电动推杆的一端与滑块连接,所述第一电动推杆的另一端与所述连接架连接,所述角度电机设置在连接架的一端,所述连接架上设置有转动杆,所述转动杆的一端与角度电机的输出端连接,所述转动杆的另一端与连接架转动连接,所述压板的一端与转动杆连接。
3.根据权利要求1所述的智能医疗垃圾处理系统,其特征在于,所述旋转机构包括电动伸缩杆、旋转支架、公转电机、转盘、自转电机及夹子,所述电动伸缩杆的输出端与所述旋转支架连接,所述公转电机与旋转支架远离电动伸缩杆的一端连接,所述转盘与公转电机的输出端连接,所述转盘远离公转电机的一侧表面上连接有多个所述自转电机,所述自转电机的输出端上连接有所述夹子。
4.根据权利要求1所述的智能医疗垃圾处理系统,其特征在于,所述捆扎机构包括第一机械臂和第二机械臂,所述第一机械臂包括机械臂段一、机械臂段二、机械臂段三、第一气缸、第一夹块及第二夹块,所述机械臂段一的一端与所述机械臂段二的一端活动连接,所述机械臂段二远离机械臂段一的一端与机械臂段三的一端活动连接,所述机械臂段三远离机械臂段二的一端与第一气缸连接,所述第一夹块及所述第二夹块分别与第一气缸的输出端连接,所述第二机械臂包括机械臂段四、机械臂段五、机械臂段六及机械手爪,所述机械臂段四的一端与所述机械臂段五的一端活动连接,所述机械臂段五远离机械臂段四的一端与机械臂段六的一端活动连接,所述机械臂段六远离机械臂段五的一端与所述机械手爪连接。
5.根据权利要求1所述的智能医疗垃圾处理系统,其特征在于,所述定位机构包括升降组件及第一移动组件,所述升降组件包括电动升降杆,所述电动升降杆的输出端与操作平台连接,所述第一移动组件包括第一滑轨、第一移动电机、第一丝杆及第一移动块,所述第一移动电机设置在第一滑轨的一端,所述第一丝杆设置在第一滑轨内,所述第一丝杆的一端与第一移动电机的输出端连接,所述第一丝杆的另一端与第一滑轨转动连接,所述第一移动块设置在第一丝杆上,并与第一丝杆螺纹连接,所述第一移动块与电动升降杆远离操作平台的一端连接。
6.根据权利要求5所述的智能医疗垃圾处理系统,其特征在于,所述推送机构包括第二移动组件及推送组件,所述第二移动组件包括第二滑轨、第二移动电机、第二丝杆及第二移动块,所述第二滑轨与第一滑轨平行设置,所述第二移动电机设置在第二滑轨的一端,所述第二丝杆设置在第二滑轨内,所述第二丝杆的一端与第二移动电机的输出端连接,所述第二丝杆的另一端与第二滑轨转动连接,所述第二移动块设置在第二丝杆上,并与第二丝杆螺纹连接,所述推送组件包括立柱、第二电动推杆及推板,所述立柱的一端与第二移动块连接,所述立柱的另一端与第二电动推杆连接,所述第二电动推杆的输出端与推板连接。
7.根据权利要求6所述的智能医疗垃圾处理系统,其特征在于,所述垃圾分类存储箱包括箱体及回收桶,所述箱体内设有多个容置腔,多个所述容置腔内分别放置有所述回收桶,每个容置腔上开设有投送口,所述投送口与推板位于同一水平线上,所述投送口上活动连接有盖板。
8.根据权利要求7所述的智能医疗垃圾处理系统,其特征在于,所述系统还包括输送机构,所述输送机构位于容置腔内,所述输送机构包括输送电机、主动滚筒、从动滚筒及输送带,所述输送电机的输出端与主动滚筒连接,所述主动滚筒通过所述输送带与所述从动滚筒连接,所述回收桶放置在输送带上。
9.根据权利要求1所述的智能医疗垃圾处理系统,其特征在于,所述系统还包括称重机构,所述称重机构包括称重传感器,所述称重传感器设置在操作平台下侧,所述称重传感器与操作平台连接。
10.根据权利要求1所述的智能医疗垃圾处理系统,其特征在于,所述系统还包括控制机构,所述控制机构包括控制面板、读卡器、摄像头及标签识别器,所述读卡器、摄像头及标签识别器均集成在所述控制面板内。
技术总结
本申请提出一种智能医疗垃圾处理系统,包括操作平台、夹持机构、旋转机构、捆扎机构、定位机构、推送机构及垃圾分类存储箱,操作平台用于放置装有医疗垃圾的垃圾袋,夹持机构用于夹紧放置在操作平台上的所述垃圾袋,旋转机构用于收紧垃圾袋的袋口,捆扎机构用于捆扎垃圾袋的袋口,定位机构用于将捆扎后的垃圾袋移动到推送机构与垃圾分类存储箱之间,以使推送机构将垃圾袋推送入垃圾分类存储箱内。本发明分别通过夹持机构、旋转机构、捆扎机构、定位机构及推送机构对垃圾袋进行打包并推送到垃圾分类存储箱内,无需工作人员多次搬运及打包,避免了感染的风险,提高安全性,且通过机器运作,提高了工作效率。
技术研发人员:麦芳媛,纪新凤,徐春丽,张亮升,关思源,吕杨,陈天垠
受保护的技术使用者:海南金域医学检验中心有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!