一种AGV取货机器人的制作方法
本申请涉及仓储运输,具体涉及一种agv取货机器人。
背景技术:
1、在工业及物流领域中,通常在工厂或仓库中使用agv叉车进行货物的存取和搬运。但是现有的agv叉车对地面平整度要求较高,当agv叉车行驶在非平整地面上时,将造成货叉与货物的存放面非平行,使得agv叉车无法正常进出货叉,导致无法完成货物的存取和搬运。
技术实现思路
1、本申请的目的在于提供一种agv取货机器人,解决现有agv叉车无法在非平整地面完成货物的存取和搬运的问题。
2、本申请解决其技术问题所采用的技术方案是:一种agv取货机器人,包括agv车,所述agv车上设置有门架,所述门架上设置有货叉座,所述货叉座与所述门架之间设置有驱动所述货叉座升降的升降机构,所述货叉座上铰接有货叉,所述货叉与所述货叉座之间设置有驱动所述货叉绕其与所述货叉座的铰接位置上下转动的第一驱动机构。
3、进一步的,所述货叉上设置有货叉倾角传感器,所述货叉倾角传感器、所述升降机构和所述第一驱动机构分别与所述agv车的控制系统连接。
4、进一步的,所述agv车上设置有门架座,所述门架的下端与所述门架座铰接,所述门架与所述门架座之间设置有驱动所述门架绕其与所述门架座的铰接位置转动的第二驱动机构。
5、进一步的,所述门架上设置有门架倾角传感器,所述门架倾角传感器和所述第二驱动机构分别与所述agv车的控制系统连接。
6、进一步的,所述门架座滑动安装在所述agv车上,所述门架座与所述agv车之间设置有驱动所述门架座在所述agv车上移动的平移机构。
7、进一步的,所述门架座在所述agv车上的移动方向与所述agv车的行走方向相一致。
8、进一步的,所述agv车上设置有车身倾斜传感器,所述车身倾斜传感器与所述agv车的控制系统连接。
9、进一步的,所述货叉座上朝向所述货叉的一侧设置有货物位置识别装置,所述货物位置识别装置与所述agv车的控制系统连接。
10、进一步的,所述agv车上设置有激光扫描头,所述激光扫描头与所述agv车的控制系统连接。
11、进一步的,所述agv车上设置有向上延伸的加长杆,所述激光扫描头设置在所述加长杆的上端。
12、本申请的有益效果:
13、本申请实施例提供的agv取货机器人,可利用第一驱动机构调节货叉的倾斜角度,使货叉的倾斜角度与货物存放面的倾斜角度相一致,确保agv取货机器人可在非平整地面正常进出货叉,完成货物的存取和搬运工作;与现有技术相比,本申请摆脱了传统agv叉车对地面平整度的依赖。
技术特征:
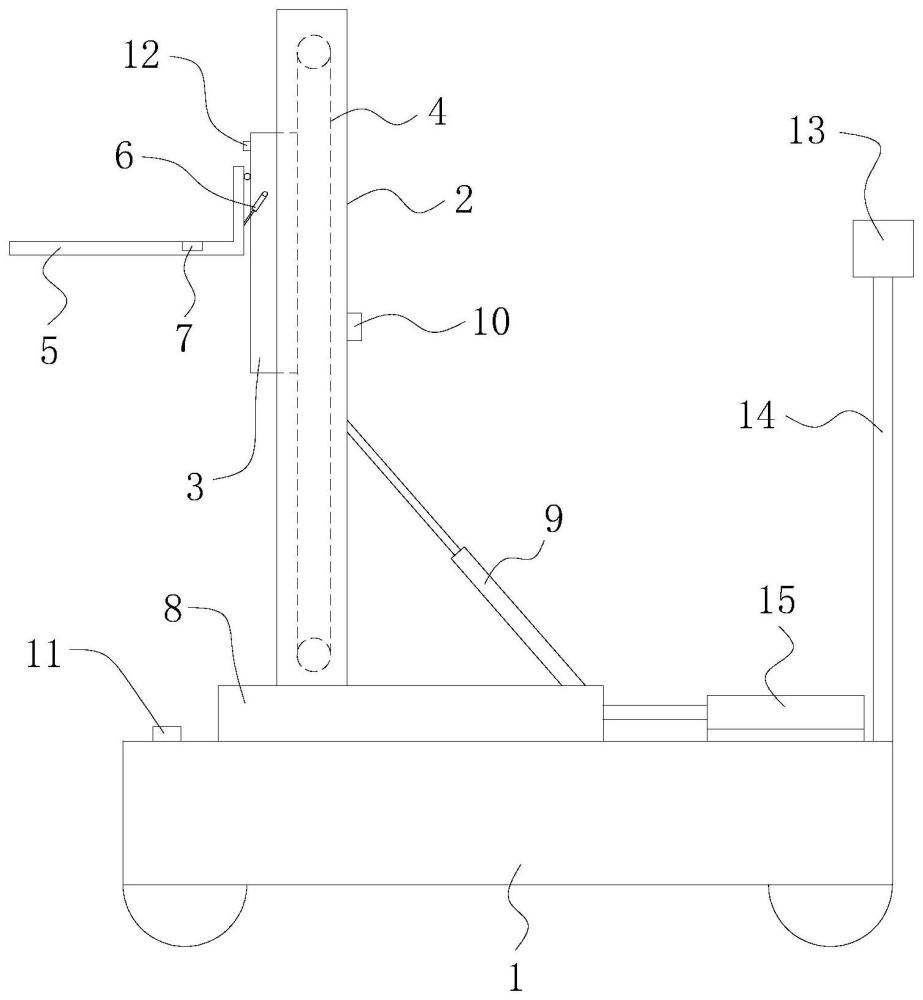
1.一种agv取货机器人,其特征在于,包括agv车(1),所述agv车(1)上设置有门架(2),所述门架(2)上设置有货叉座(3),所述货叉座(3)与所述门架(2)之间设置有驱动所述货叉座(3)升降的升降机构(4),所述货叉座(3)上铰接有货叉(5),所述货叉(5)与所述货叉座(3)之间设置有驱动所述货叉(5)绕其与所述货叉座(3)的铰接位置上下转动的第一驱动机构(6)。
2.根据权利要求1所述的agv取货机器人,其特征在于,所述货叉(5)上设置有货叉倾角传感器(7),所述货叉倾角传感器(7)、所述升降机构(4)和所述第一驱动机构(6)分别与所述agv车(1)的控制系统连接。
3.根据权利要求1所述的agv取货机器人,其特征在于,所述agv车(1)上设置有门架座(8),所述门架(2)的下端与所述门架座(8)铰接,所述门架(2)与所述门架座(8)之间设置有驱动所述门架(2)绕其与所述门架座(8)的铰接位置转动的第二驱动机构(9)。
4.根据权利要求3所述的agv取货机器人,其特征在于,所述门架(2)上设置有门架倾角传感器(10),所述门架倾角传感器(10)和所述第二驱动机构(9)分别与所述agv车(1)的控制系统连接。
5.根据权利要求3或4所述的agv取货机器人,其特征在于,所述门架座(8)滑动安装在所述agv车(1)上,所述门架座(8)与所述agv车(1)之间设置有驱动所述门架座(8)在所述agv车(1)上移动的平移机构(15)。
6.根据权利要求5所述的agv取货机器人,其特征在于,所述门架座(8)在所述agv车(1)上的移动方向与所述agv车(1)的行走方向相一致。
7.根据权利要求1所述的agv取货机器人,其特征在于,所述agv车(1)上设置有车身倾斜传感器(11),所述车身倾斜传感器(11)与所述agv车(1)的控制系统连接。
8.根据权利要求1所述的agv取货机器人,其特征在于,所述货叉座(3)上朝向所述货叉(5)的一侧设置有货物位置识别装置(12),所述货物位置识别装置(12)与所述agv车(1)的控制系统连接。
9.根据权利要求1所述的agv取货机器人,其特征在于,所述agv车(1)上设置有激光扫描头(13),所述激光扫描头(13)与所述agv车(1)的控制系统连接。
10.根据权利要求9所述的agv取货机器人,其特征在于,所述agv车(1)上设置有向上延伸的加长杆(14),所述激光扫描头(13)设置在所述加长杆(14)的上端。
技术总结
本申请公开了一种AGV取货机器人,涉及仓储运输技术领域。该AGV取货机器人,包括AGV车,所述AGV车上设置有门架,所述门架上设置有货叉座,所述货叉座与所述门架之间设置有驱动所述货叉座升降的升降机构,所述货叉座上铰接有货叉,所述货叉与所述货叉座之间设置有驱动所述货叉绕其与所述货叉座的铰接位置上下转动的第一驱动机构。本申请实施例提供的AGV取货机器人,可利用第一驱动机构调节货叉的倾斜角度,使货叉的倾斜角度与货物存放面的倾斜角度相一致,确保AGV取货机器人可在非平整地面正常进出货叉,完成货物的存取和搬运工作;与现有技术相比,本申请摆脱了传统AGV叉车对地面平整度的依赖。
技术研发人员:时吕,刘彭飞,李志涛,寇少波,杨金英,何奇毅,易黄懿
受保护的技术使用者:云南昆船智能装备有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!