压动式通用自动手爪机构
本发明属于重载机械领域,特别是一种压动式通用的自动手爪机构。
背景技术:
1、手爪机构作为折臂吊与负载的连接机构,是折臂吊的重要组成部分之一。压动式自动手爪可以广泛用于大型机械设备并提高其自动化程度。由于折臂吊大部分使用在重载场景,现有手爪机构往往采用两边夹的方式连接负载,手爪和负载相连或者分离时需要人工控制,其缺点是连接相对不可靠,不能用于大负载或者自动化程度较低。现有大负载自动手爪大多采用舵机或者电机与负载相连或者分离,造价较高,结构相对复杂。
技术实现思路
1、本发明的目的在于提供一种压动式通用的自动手爪机构,无需额外提供驱动力。
2、实现本发明目的的技术解决方案为:
3、一种压动式通用自动手爪机构,包括:内套筒,与内套筒套接的外套筒,与内套筒螺旋配合的棘轮驱动柱,与棘轮驱动柱连接的棘轮座,与棘轮驱动柱转动连接的凸轮,对称设置在外套筒内并与凸轮表面接触的球头伸出销;
4、所述外套筒能够相对内套筒上下运动,无法相对转动;通过按压外套筒实现棘轮驱动柱相对内套筒的螺旋向上运动;
5、所述棘轮驱动柱能够相对内套筒实现90°旋转升降,并与内套筒之间设有能够为棘轮驱动柱向下旋转复位提供动力的第一复位模块;
6、所述棘轮座内沿周向均匀设有四个棘爪;棘爪与棘轮座转动连接,且与棘轮座之间设有能够使棘爪向下运动以与回转凸轮配合的第二复位模块;
7、所述回转凸轮为椭圆凸轮,均布有四个梯形台阶,用于棘爪实现单向间歇运动,完成对球头伸出销的伸出与缩回动作;
8、所述伸出销与外套筒之间设有第三复位模块,具有驱动伸出销回缩的势能;
9、所述回转凸轮与外套筒之间设有锁止结构,用于球头伸出销与负载连接或分离到位时对回转凸轮的锁止。
10、本发明与现有技术相比,其显著优点是:
11、本发明实现了手爪与负载的自动连接与分离,无需额外提供驱动力,结构简单,无需任何传感器,通用性好,可以承受较大质量负载;同时提供了两种与负载的连接方式,适用于不同形态负载。
技术特征:
1.一种压动式通用自动手爪机构,其特征在于,包括:内套筒,与内套筒套接的外套筒,与内套筒螺旋配合的棘轮驱动柱,与棘轮驱动柱连接的棘轮座,与棘轮驱动柱转动连接的凸轮,对称设置在外套筒内并与凸轮表面接触的球头伸出销;
2.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述内套筒下端设有对称两个定位螺栓,棘轮驱动柱上设有螺旋轨道;定位螺栓与棘轮驱动柱螺旋轨道配合,控制棘轮驱动柱相对内套筒向上旋转运动的同时回转90°。
3.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述第一复位模块为设置在内套筒与棘轮驱动柱二者内部之间的第一弹簧。
4.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述外套筒上设有定位槽,定位槽的长度方向平行于外套筒轴向,内套筒上设有内筒行程定位轴,内筒行程定位轴,与定位槽滑动配合,实现内套筒相对外套筒的活塞式运动。
5.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述第二复位模块包括第二弹簧和滚珠;第二弹簧设置棘轮座上,滚珠在第二弹簧作用下与棘爪接触,使棘爪向下弹出。
6.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述锁止结构包括底部弹簧和钢珠;回转凸轮底部设有四个底部弹簧和四个钢珠使四个钢珠在凸轮回转到位时顶入外套筒四个半球形底部开槽中,对回转凸轮进行定位锁止。
7.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述第三复位模块为设置在球头伸出销的凸台与外套筒之间的第三弹簧。
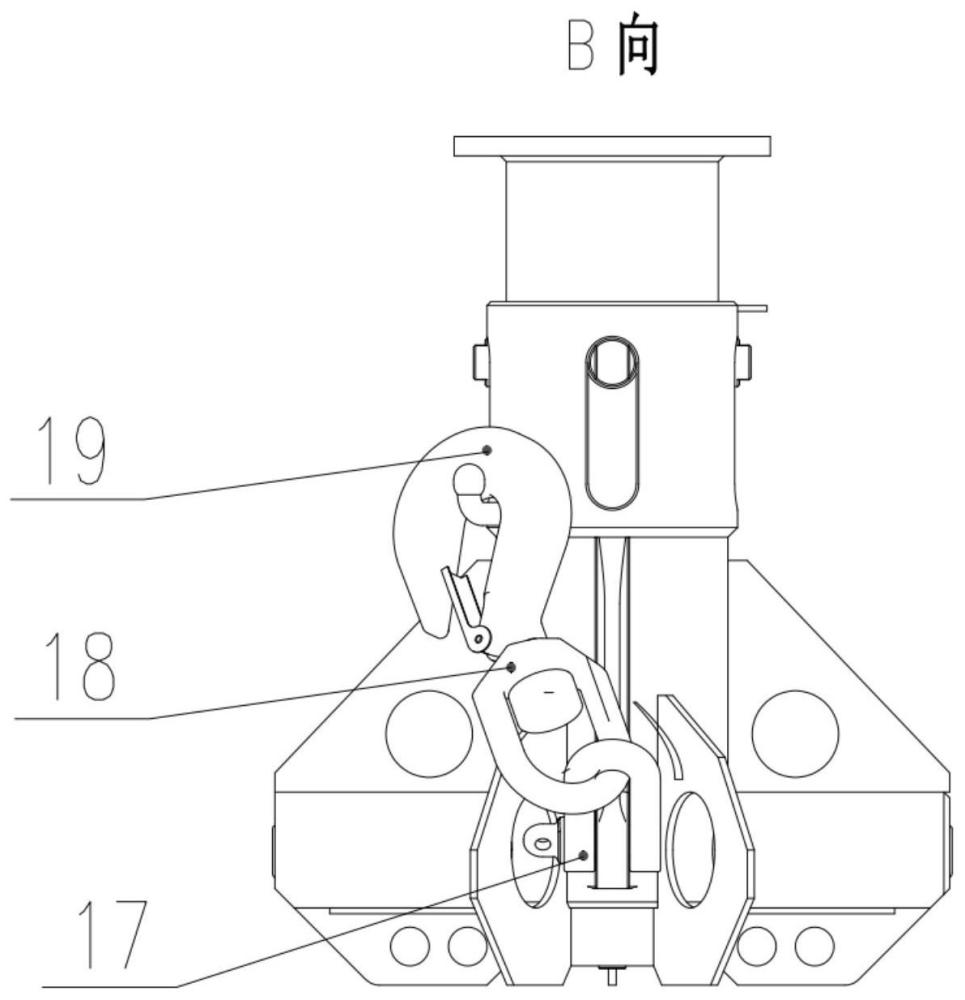
8.根据权利要求1所述的压动式通用自动手爪机构,其特征在于,所述外套筒1上还连接有挂钩。
技术总结
本发明公开一种压动式通用自动手爪机构,包括导向模块、棘轮模块、锁止模块、连接模块;导向模块包括内套筒、外套筒、棘轮驱动柱、第一弹簧、轴承;棘轮模块棘轮座、第二弹簧、滚珠、棘爪、棘爪安装轴;锁止模块包括回转凸轮、底部弹簧、钢珠;连接模块包括球头伸出销、挂钩、第三弹簧。所述内套筒和外套筒通过内筒行程定位轴连接在一个槽中,实现相互活塞运动并带动棘轮驱动柱驱动棘轮并带动回转凸轮间歇运动,通过回转凸轮的转动驱动球头伸出销弹出或者缩回,球头伸出销上悬挂负载;也可以通过外套筒上安装挂钩直接悬挂负载。实现通过上压外套筒控制球头伸出销伸出或者收回,并且可以使用挂钩进行悬挂负载。
技术研发人员:徐亚栋,王浩瑞,邹权,陈光宋
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!