一种标准节安装参数确定方法及系统与流程
本说明书涉及塔吊领域,尤其涉及一种标准节安装参数确定方法及系统。
背景技术:
1、塔吊是建筑工程作业中常用的起重吊装设备,塔吊的塔身主体部分是由多节标准节叠加组成。然而,塔吊安装过程中若主要的标准节出现变形或破损等情况,则很容易造成严重的作业事故。
2、针对如何安装塔吊,cn115818458a公开了一种标准节组装和拆卸系统及操作方法,该现有技术在地面组装好上套架、下套架、引进系统后,通过引进系统引进标准节至下套架内的预定位置将预置标准节与引进标准节利用穿销装置连接。然而,标准节组装过程中存在多种风险,例如,塔吊安装的越高,越难发现标准节中的变形和裂纹等缺陷。又例如,塔吊安装的越高,其可能受到环境等多种因素影响导致倾斜,造成安全事故。该现有技术并未考虑到标准节组装过程中的风险情况。
3、因此,提供一种标准节安装参数确定方法及系统,有助于在安装标准节的过程中,实时监测各种风险并及时预警。
技术实现思路
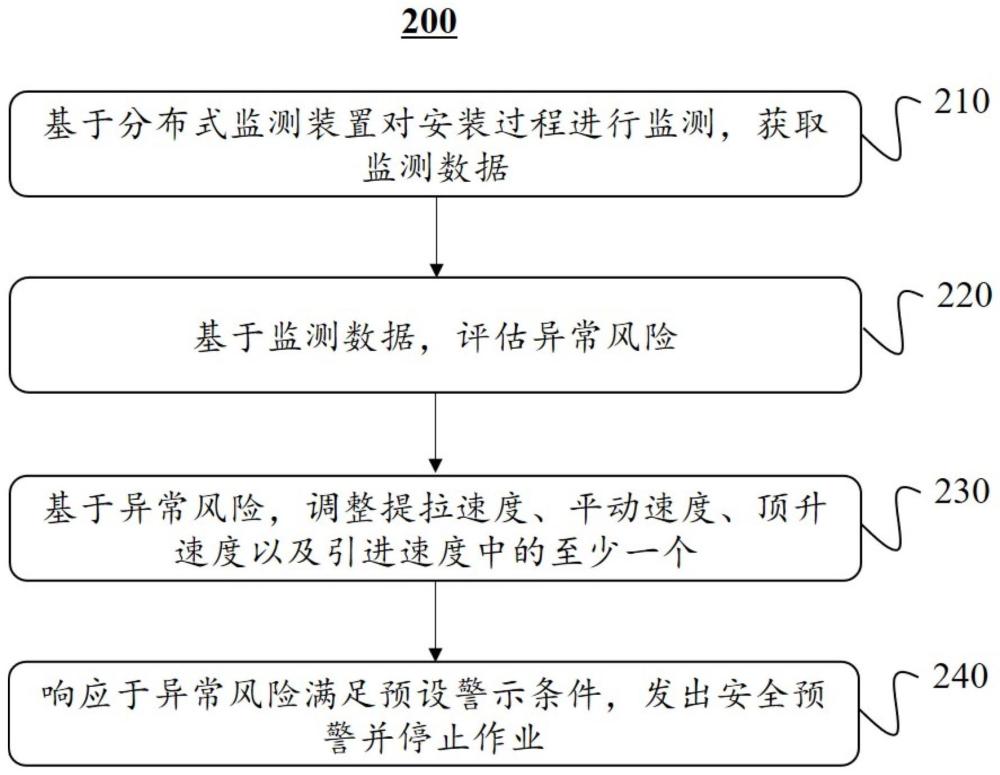
1、本说明书实施例之一提供一种标准节安装参数确定方法,所述方法由处理器执行,包括:通过预检测装置,对顶部结构中至少一个机构进行预检测,所述至少一个机构至少包括顶升机构、变幅机构以及引进机构中至少一个;响应于所述预检测的第一检测结果为合格且从控制台接收到安装启动指令,基于提拉速度、平动速度、顶升参数和引进速度执行至少一个待安装标准节的安装任务,所述顶升参数包括顶升速度、顶升高度;其中,对于所述至少一个待安装标准节中任意一个待安装标准节,执行对应的子安装任务;在所述子安装任务的执行过程中,基于分布式监测装置对安装过程进行监测,获取监测数据;所述分布式监测装置包括无人机监测单元、部署于一个或多个预设点位的监测数据采集单元;所述无人机监测单元由至少一个无人机构成;所述监测数据采集单元包括图像监测单元和超声监测单元;所述监测数据包括由所述至少一个无人机以目标巡航路线采集的数据、所述超声监测单元采集的超声数据以及所述图像监测单元采集的图像数据;基于所述监测数据,评估异常风险;基于所述异常风险,调整所述提拉速度、所述平动速度、所述顶升速度以及所述引进速度中的至少一个;其中,所述目标巡航路线基于至少一个高风险异常点和至少一个常规点确定,所述高风险异常点是标准节上历史发生故障次数大于预设次数的单元结构;所述至少一个高风险异常点用于确定所述至少一个无人机中每个无人机的候选巡航路线,构成多个候选巡航路线组合;所述至少一个常规点用于确定各个所述候选巡航路线组合的优选值,所述优选值相关于所述候选巡航路线中的常规点覆盖度,所述优选值用于从所述多个候选巡航路线组合中确定所述目标巡航路线组合,得到所述每个无人机的所述目标巡航路线。
2、本说明书实施例之一提供一种标准节安装参数确定系统,所述系统包括预检测模块、安装模块和风险确定模块:所述预检测模块,被配置为通过预检测装置,对顶部结构中至少一个机构进行预检测,所述至少一个机构至少包括顶升机构、变幅机构以及引进机构中至少一个;所述安装模块,被配置为响应于所述预检测的第一检测结果为合格且从控制台接收到安装启动指令,基于提拉速度、平动速度、顶升参数和引进速度执行至少一个待安装标准节的安装任务,所述顶升参数包括顶升速度、顶升高度;其中,对于所述至少一个待安装标准节中任意一个待安装标准节,执行对应的子安装任务;所述风险确定模块被配置为在所述子安装任务的执行过程中:基于分布式监测装置对安装过程进行监测,获取监测数据;所述分布式监测装置包括无人机监测单元、部署于一个或多个预设点位的监测数据采集单元;所述无人机监测单元由至少一个无人机构成;所述监测数据采集单元包括图像监测单元和超声监测单元;所述监测数据包括由所述至少一个无人机以目标巡航路线采集的数据、所述超声监测单元采集的超声数据以及所述图像监测单元采集的图像数据;基于所述监测数据,评估异常风险;基于所述异常风险,调整所述提拉速度、所述平动速度、所述顶升速度以及所述引进速度中的至少一个;其中,所述目标巡航路线基于至少一个高风险异常点和至少一个常规点确定,所述高风险异常点是标准节上历史发生故障次数大于预设次数的单元结构;所述至少一个高风险异常点用于确定所述至少一个无人机中每个无人机的候选巡航路线,构成多个候选巡航路线组合;所述至少一个常规点用于确定各个所述候选巡航路线组合的优选值,所述优选值相关于所述候选巡航路线中的常规点覆盖度,所述优选值用于从所述多个候选巡航路线组合中确定所述目标巡航路线组合,得到所述每个无人机的所述目标巡航路线。
技术特征:
1.一种标准节安装参数确定方法,其特征在于,所述方法由处理器执行,包括:
2.如权利要求1所述的方法,其特征在于,所述对于所述至少一个待安装标准节中任意一个待安装标准节,执行对应的子安装任务包括:
3.如权利要求2所述的方法,其特征在于,所述方法还包括:在所述子安装任务的执行过程中,
4.如权利要求1所述的方法,其特征在于,所述方法还包括:
5.如权利要求1所述的方法,其特征在于,所述方法还包括:在所述子安装任务的执行过程中,
6.一种标准节安装参数确定系统,其特征在于,所述系统包括预检测模块、安装模块和风险确定模块:
7.如权利要求6所述的系统,其特征在于,所述安装模块进一步被配置为:
8.如权利要求7所述的系统,其特征在于,所述安装模块进一步被配置为:在所述子安装任务的执行过程中,
9.如权利要求6所述的系统,其特征在于,所述安装模块还被配置为:
10.如权利要求6所述的系统,其特征在于,所述风险确定模块还被配置为:在所述子安装任务的执行过程中,
技术总结
本说明书实施例提供一种标准节安装参数确定方法及系统,该方法包括通过预检测装置,对顶部结构中的顶升机构、变幅机构及引进机构中至少一个进行预检测;响应于预检测结果合格且接收到安装启动指令,执行每个待安装标准节的子安装任务;该过程中,通过分布式监测装置获取监测数据;分布式监测装置包括无人机监测单元、多个预设点位的监测数据采集单元;监测数据采集单元包括图像监测单元和超声监测单元;监测数据包括无人机以目标巡航路线采集的数据、超声监测单元采集的超声数据及图像监测单元采集的图像数据;基于监测数据评估异常风险;基于异常风险调整提拉速度、平动速度、顶升速度及引进速度中的至少一个。
技术研发人员:金晓春,王魏,陆彩虹,董国,黄亚南,黄春勇
受保护的技术使用者:江苏久和机械有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!