装载机的卸料控制方法、装置、电子设备及存储介质与流程
本公开涉及装载机控制,尤其是涉及一种装载机的卸料控制方法、装置、电子设备及存储介质。
背景技术:
1、装载机是一种广泛使用的移动运输设备,通常用于矿山或者建筑工地的拌合站等场景的物料运输。装载机的工作通常分为三个部分:铲料、移动和卸料。其中,卸料过程对铲斗的定位要求较高,以避免铲斗与料箱发生碰撞或物料未落入料箱内。
2、现有装载机控制技术中,通常采用3d(三维)激光雷达进行全局定位。该技术需要在部署阶段构建全局场景地图,再根据全局场景地图控制装载机的行使路线和卸料过程的铲斗定位。而装载机的使用场景中涉及到的对象较多,构建的全局场景地图精度不高,基于该全局场景地图进行的铲斗定位精度也会不高,进而影响铲斗的安全性。
技术实现思路
1、本公开的目的在于提供一种装载机的卸料控制方法、装置、电子设备及存储介质,以提升装载机卸料过程中铲斗定位的精度,保障铲斗的安全性。
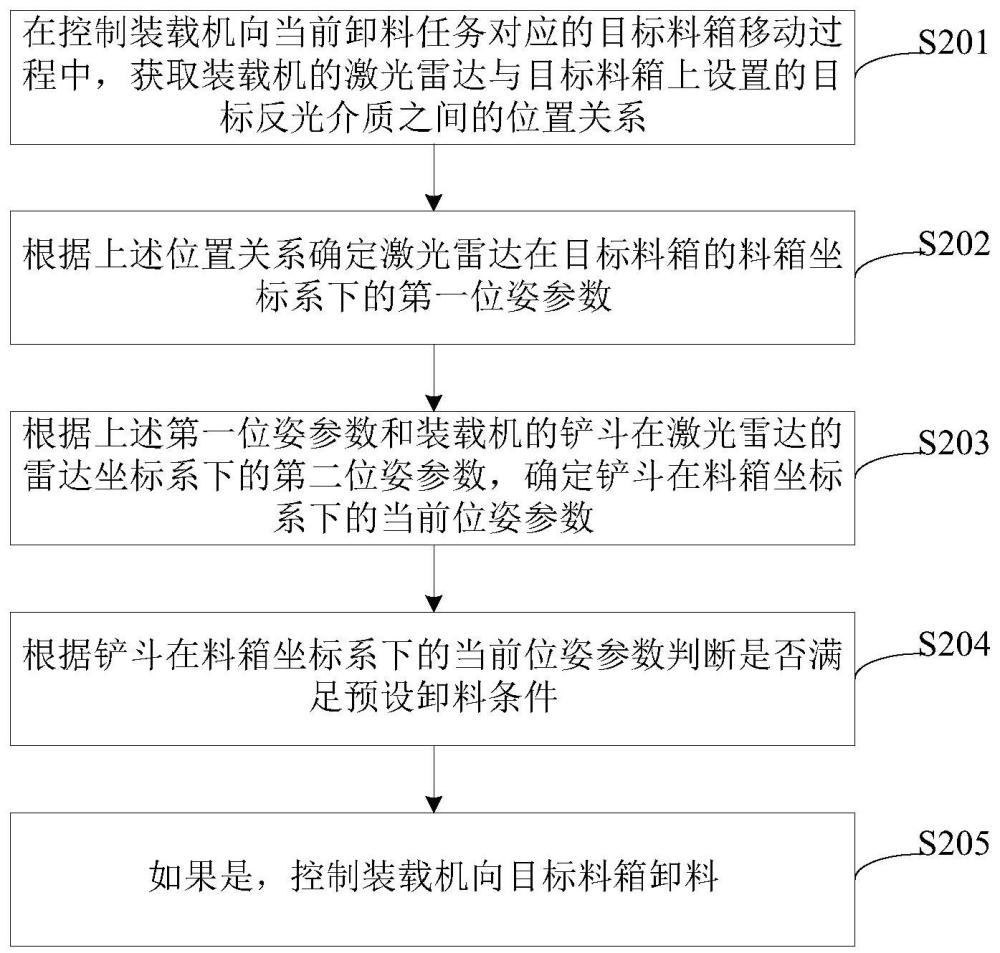
2、本公开实施例提供一种装载机的卸料控制方法,该方法包括:在控制所述装载机向当前卸料任务对应的目标料箱移动过程中,获取所述装载机的激光雷达与所述目标料箱上设置的目标反光介质之间的位置关系;根据所述位置关系确定所述激光雷达在所述目标料箱的料箱坐标系下的第一位姿参数;根据所述第一位姿参数和所述装载机的铲斗在所述激光雷达的雷达坐标系下的第二位姿参数,确定所述铲斗在所述料箱坐标系下的当前位姿参数;根据所述铲斗在所述料箱坐标系下的当前位姿参数判断是否满足预设卸料条件;如果是,控制所述装载机向所述目标料箱卸料。
3、第二方面,本公开实施例还提供一种装载机的卸料控制装置,所述装置包括:位置关系获取模块,用于在控制所述装载机向当前卸料任务对应的目标料箱移动过程中,获取所述装载机的激光雷达与所述目标料箱上设置的目标反光介质之间的位置关系;雷达位姿确定模块,用于根据所述位置关系确定所述激光雷达在所述目标料箱的料箱坐标系下的第一位姿参数;铲斗位姿确定模块,根据所述第一位姿参数和所述装载机的铲斗在所述激光雷达的雷达坐标系下的第二位姿参数,确定所述铲斗在所述料箱坐标系下的当前位姿参数;卸料判断模块,用于根据所述铲斗在所述料箱坐标系下的当前位姿参数判断是否满足预设卸料条件;卸料模块,用于在所述卸料判断模块的判断结果为是时,控制所述装载机向所述目标料箱卸料。
4、第三方面,本公开实施例还提供一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现上述装载机的卸料控制方法。
5、第四方面,本公开实施例还提供一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现上述装载机的卸料控制方法。
6、本公开实施例提供一种装载机的卸料控制方法、装置、电子设备及存储介质,通过在目标料箱上设置目标反光介质,可以在控制装载机向目标料箱移动过程中,获取装载机的激光雷达与目标料箱上设置的目标反光介质之间的位置关系,进而根据该位置关系确定激光雷达在目标料箱的料箱坐标系下的第一位姿参数,而装载机的铲斗在激光雷达的雷达坐标系下的第二位姿参数是已知信息(可以直接从激光雷达上读取),因此根据上述第一位姿参数和第二位姿参数可以确定出铲斗在料箱坐标系下的当前位姿参数,由当前位姿参数可以准确地定位出铲斗与目标料箱的相对位置关系,因此根据铲斗在料箱坐标系下的当前位姿参数可以判断当前时刻是否满足预设卸料条件,在满足卸料条件时,控制装载机向目标料箱卸料。该方式中仅涉及到了雷达坐标系和料箱坐标系两个局部坐标系,未涉及到在卸料场景的全局坐标系下定位铲斗的位姿,故实现上简单,可靠性更高,有效保障了铲斗卸料的安全性。
技术特征:
1.一种装载机的卸料控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预设卸料条件包括所述铲斗与所述目标料箱间的距离小于第一预设值,和/或所述铲斗与所述目标料箱的料箱外壁间的距离大于第二预设值,以使所述铲斗与所述目标料箱不发生碰撞。
3.根据权利要求1所述的方法,其特征在于,获取所述装载机的激光雷达与所述目标料箱的目标反光介质之间的位置关系包括:
4.根据权利要求3所述的方法,其特征在于,所述目标反光介质为多个;根据接收到的所述反射激光束确定所述激光雷达与所述目标反光介质间的位置关系包括:
5.根据权利要求4所述的方法,其特征在于,根据各个反射激光束组中的光束连续性确定多个待定反光介质包括:
6.根据权利要求5所述的方法,其特征在于,根据最近一次所述激光雷达到所述目标料箱的距离,确定第一动态阈值和第二动态阈值包括:
7.根据权利要求5所述的方法,其特征在于,根据所述第一动态阈值和所述第二动态阈值确定各个反射激光束组的光束是否连续有效包括:
8.根据权利要求4所述的方法,其特征在于,确定多个所述待定反光介质间的第二距离信息包括:
9.根据权利要求4所述的方法,其特征在于,所述目标反光介质为两个;根据多个所述目标反光介质间的第一距离信息,以及多个所述待定反光介质间的第二距离信息,确定多个所述目标反光介质对应的多个目标反射激光束组包括:
10.根据权利要求3所述的方法,其特征在于,所述目标反光介质为两个;根据接收到的所述反射激光束确定所述激光雷达与所述目标反光介质间的位置关系包括:
11.根据权利要求1所述的方法,其特征在于,所述目标反光介质为两个;根据所述位置关系确定所述激光雷达在所述目标料箱的料箱坐标系下的第一位姿参数包括:
12.根据权利要求11所述的方法,其特征在于,根据所述位置关系和两个所述目标反光介质间的第一距离信息,确定所述激光雷达在所述目标料箱的料箱坐标系下的第一位姿参数包括:
13.根据权利要求12所述的方法,其特征在于,根据所述第一位姿参数和所述装载机的铲斗在所述激光雷达的雷达坐标系下的第二位姿参数,确定所述铲斗在所述料箱坐标系下的当前位姿参数包括:
14.根据权利要求1至13中任意一项所述的方法,其特征在于,所述激光雷达设置于所述装载机的车头,且所述激光雷达位于所述铲斗的下方。
15.一种装载机的卸料控制装置,其特征在于,所述装置包括:
16.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至14中任一项所述方法。
17.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现权利要求1至14中任一项所述的方法。
技术总结
本公开提供了一种装载机的卸料控制方法、装置、电子设备及存储介质。其中,该方法包括:在控制装载机向当前卸料任务对应的目标料箱移动过程中,获取装载机的激光雷达与目标料箱上设置的目标反光介质之间的位置关系;根据位置关系确定激光雷达在目标料箱的料箱坐标系下的第一位姿参数;根据第一位姿参数和装载机的铲斗在激光雷达的雷达坐标系下的第二位姿参数,确定铲斗在料箱坐标系下的当前位姿参数;根据铲斗在料箱坐标系下的当前位姿参数判断是否满足预设卸料条件;如果是,控制装载机向目标料箱卸料。通过本公开的技术,可以提升装载机卸料过程中铲斗定位的精度,保障铲斗的安全性。
技术研发人员:张志文,陈广大,姚舜一,陈赢峰,杨新伟,范长杰,胡志鹏
受保护的技术使用者:网易(杭州)网络有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!