一种堆垛行车自动控制管理系统的制作方法
本技术涉及行车控制,特别涉及一种堆垛行车自动控制管理系统。
背景技术:
1、焙烧炭块库堆垛行车工作模式是行车工在驾驶室操作手柄控制行车,手柄接入plc控制系统,手柄下发指令后,plc接受到命令,通过逻辑判断输出行车运行,垛的位置通过人工进行判断,装车通过人工进行装车。
2、焙烧炭块库堆垛行车工长时间工作,造成视觉疲劳,对堆垛行车操作精度达不到,炭块装车时,阳极炭块堆放位置仅通过肉眼操作行车,造成摆放位置不准确,存在较大的安全隐患。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种堆垛行车自动控制管理系统,还系统提高了行车运行和炭块堆放的精度,解决了人工操作带来的安全隐患问题。
2、本实用新型通过以下技术方案实现:
3、一种堆垛行车自动控制管理系统,包括用于定位大车的第一定位单元、用于定位小车的第二定位单元、车载控制单元、中控单元和料车定位单元,所述第一定位单元和第二定位单元均与所述车载控制单元连接,所述中控单元和所述车载控制单元无线连接用于监视和控制大车和小车的位置,所述料车定位单元和所述中控单元无线连接。
4、进一步的,所述第一定位单元包括第一地址编码器、第一天线箱、第一地址解码器、第一格雷姆线以及分别连接在所述第一格雷姆线首尾端的第一始端箱和第一终端箱,所述第一地址编码器和所述第一始端箱连接,所述第一地址解码器和所述第一天线箱连接。
5、进一步的,所述第二定位单元包括第二地址编码器、第二天线箱、第二地址解码器、第二格雷姆线以及分别连接在所述第二格雷姆线首尾端的第二始端箱和第二终端箱,所述第二地址编码器和所述第二始端箱连接,所述第二地址解码器和所述第二天线箱连接。
6、进一步的,所述车载控制单元包括车载plc和车载无线ap,所述车载plc同时和所述第一地址编码器和第二地址编码器连接,所述车载无线ap和所述车载plc连接。
7、进一步的,所述堆垛行车自动控制管理系统还包括地面无线ap,所述车载无线ap和地面无线ap无线连接,所述地面无线ap和所述中控单元连接。
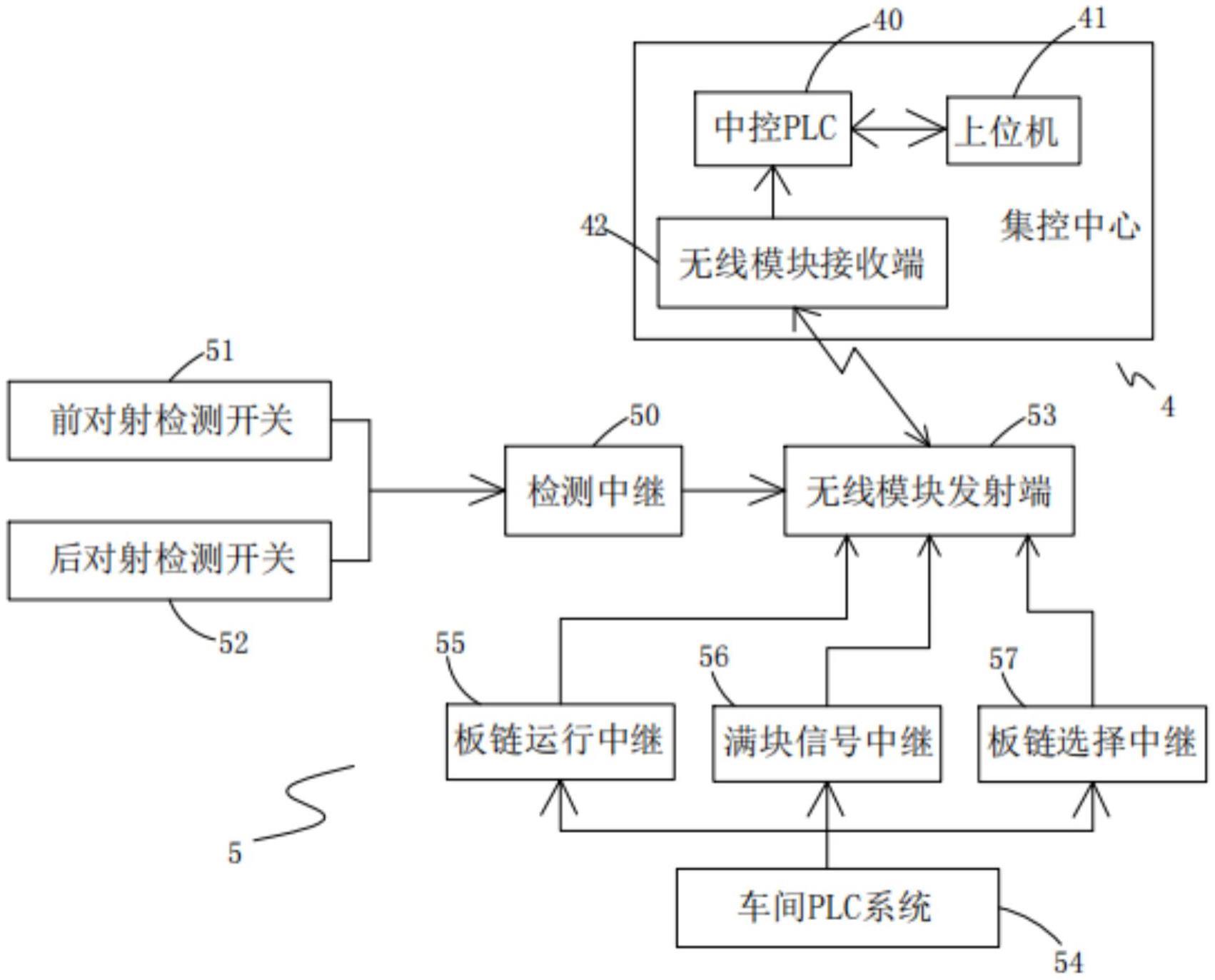
8、进一步的,所述中控单元包括中控plc以及和所述中控plc连接的上位机和无线模块接收端,所述控plc和地面无线ap连接。
9、进一步的,所述料车定位单元包括检测中继以及与所述检测中继连接的前对射检测开关、后对射检测开关和无线模块发射端,所述无线模块发射端和无线模块接收端无线连接。
10、进一步的,所述料车定位单元还包括车间plc系统以及和所述车间plc系统连接的板链运行中继、满块信息中继和板链选择中继,所述板链运行中继、满块信息中继和板链选择中继均与所述无线模块发射端连接。
11、进一步的,所述堆垛行车自动控制管理系统还包括阳极旋转编码器,所述阳极旋转编码器和所述车载plc连接。
12、相比于现有技术,本实用新型的优点在于:
13、该堆垛行车自动控制管理系统通过格雷母线定位系统提高了行车运行的精度,并且通过前对射检测开关和后对射检测开关对料车的位置进行精确定位,提高了行车与料车之间的配合度,进而提高了炭块装车的堆放精度,解决了人工操作带来的安全隐患问题。
技术特征:
1.一种堆垛行车自动控制管理系统,其特征在于,包括用于定位大车的第一定位单元(1)、用于定位小车的第二定位单元(2)、车载控制单元(3)、中控单元(4)和料车定位单元(5),所述第一定位单元(1)和第二定位单元(2)均与所述车载控制单元(3)连接,所述中控单元(4)和所述车载控制单元(3)无线连接用于监视和控制大车和小车的位置,所述料车定位单元(5)和所述中控单元(4)无线连接。
2.根据权利要求1所述的堆垛行车自动控制管理系统,其特征在于,所述第一定位单元(1)包括第一地址编码器(10)、第一天线箱(11)、第一地址解码器(12)、第一格雷姆线(13)以及分别连接在所述第一格雷姆线(13)首尾端的第一始端箱(14)和第一终端箱(15),所述第一地址编码器(10)和所述第一始端箱(14)连接,所述第一地址解码器(12)和所述第一天线箱(11)连接。
3.根据权利要求2所述的堆垛行车自动控制管理系统,其特征在于,所述第二定位单元(2)包括第二地址编码器(20)、第二天线箱(21)、第二地址解码器(22)、第二格雷姆线(23)以及分别连接在所述第二格雷姆线(23)首尾端的第二始端箱(24)和第二终端箱(25),所述第二地址编码器(20)和所述第二始端箱(24)连接,所述第二地址解码器(22)和所述第二天线箱(21)连接。
4.根据权利要求3所述的堆垛行车自动控制管理系统,其特征在于,所述车载控制单元(3)包括车载plc(30)和车载无线ap(31),所述车载plc(30)同时和所述第一地址编码器(10)和第二地址编码器(20)连接,所述车载无线ap(31)和所述车载plc(30)连接。
5.根据权利要求4所述的堆垛行车自动控制管理系统,其特征在于,所述堆垛行车自动控制管理系统还包括地面无线ap(6),所述车载无线ap(31)和地面无线ap(6)无线连接,所述地面无线ap(6)和所述中控单元(4)连接。
6.根据权利要求5所述的堆垛行车自动控制管理系统,其特征在于,所述中控单元(4)包括中控plc(40)以及和所述中控plc(40)连接的上位机(41)和无线模块接收端(42),所述控plc(40)和地面无线ap(6)连接。
7.根据权利要求6所述的堆垛行车自动控制管理系统,其特征在于,所述料车定位单元(5)包括检测中继(50)以及与所述检测中继(50)连接的前对射检测开关(51)、后对射检测开关(52)和无线模块发射端(53),所述无线模块发射端(53)和无线模块接收端(42)无线连接。
8.根据权利要求7所述的堆垛行车自动控制管理系统,其特征在于,所述料车定位单元(5)还包括车间plc系统(54)以及和所述车间plc系统(54)连接的板链运行中继(55)、满块信息中继(56)和板链选择中继(57),所述板链运行中继(55)、满块信息中继(56)和板链选择中继(57)均与所述无线模块发射端(53)连接。
9.根据权利要求4所述的堆垛行车自动控制管理系统,其特征在于,所述堆垛行车自动控制管理系统还包括阳极旋转编码器(7),所述阳极旋转编码器(7)和所述车载plc(30)连接。
技术总结
本技术公开了一种堆垛行车自动控制管理系统,包括用于定位大车的第一定位单元、用于定位小车的第二定位单元、车载控制单元、中控单元和料车定位单元,所述第一定位单元和第二定位单元均与所述车载控制单元连接,所述中控单元和所述车载控制单元无线连接用于监视和控制大车和小车的位置,所述料车定位单元和所述中控单元无线连接。本技术提高了行车运行和炭块堆放的精度,解决了人工操作带来的安全隐患问题。
技术研发人员:王冉,韩栋,包永斌,王兴涛,张聪,李琳
受保护的技术使用者:新疆农六师碳素有限公司
技术研发日:20230110
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!