一种全自动对接生熟料升降料仓的制作方法
本技术涉及工业设备,尤其涉及一种全自动对接生熟料升降料仓。
背景技术:
1、数码产品的零件在生产的过程中,一般都需要经过切割、打磨、抛光等多道加工工序,在不同的加工工位之间,工件需要通过机械手来进行上下料,即需要机械手将工件从一个加工位上抓取并移送至另一个加工位,待加工完成,机械手再次将工件抓取并移走,自此完成一组工件的加工作业,这样的结构需要机械手对工件有抓取、上料、再次抓取、下料的动作,上下料时花费的时间比较多,当工件较多时,一定程度上会影响加工效率,申请人专门针对这个问题进行了改进,进而研发出一种全自动对接生熟料升降料仓,减少工件的搬运时间,一定程度上提高加工效率。
技术实现思路
1、本实用新型的目的在于减少工件的搬运时间,一定程度上提高加工效率。
2、为了实现上述目的,本实用新型所采取的技术方案如下:
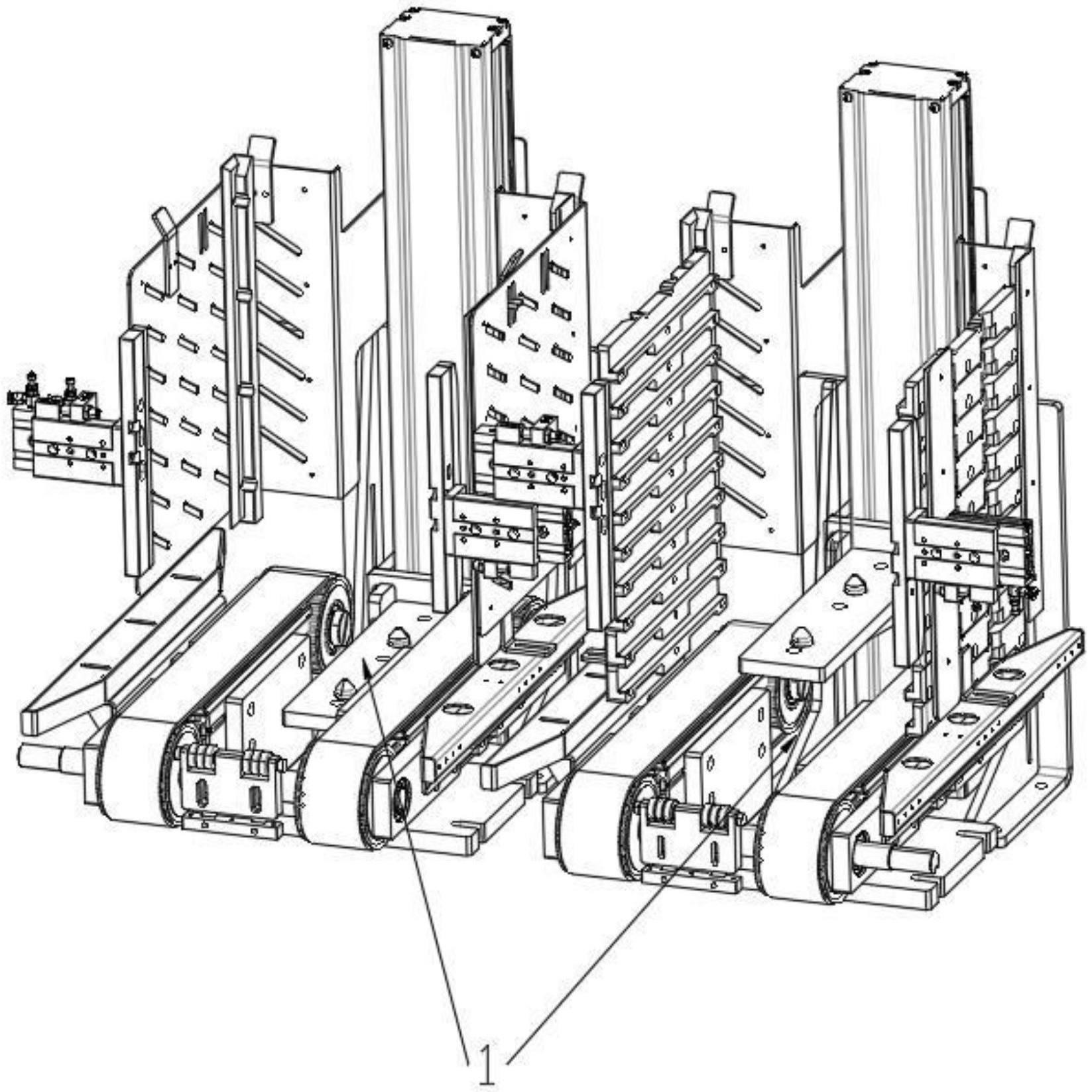
3、一种全自动对接生熟料升降料仓,包括两组并排设置的升降模组,
4、所述升降模组包括料仓、输送机构、底盘、顶升模组和两组定位模组,所述料仓的前侧、上端和下端呈开口状,所述输送机构包括支撑架、驱动电机、两条输送带和四组枢接轮,所述支撑架固定设置在在料仓的底端,所述枢接轮枢接在支撑架上,每条输送带绕设在两组枢接轮上,且两条输送带均平行于y轴方向设置,所述驱动电机驱动枢接轮转动,所述底盘位于料仓内,所述顶升模组驱动底盘在料仓内垂直升降,两组定位模组分别对称设置在料仓的两侧壁上。
5、进一步地,所述料仓的侧壁上开设有观察孔。
6、进一步地,所述底盘上固定设置有定位销。
7、进一步地,所述顶升模组为z轴气缸。
8、进一步地,所述定位模组包括定位气缸、定位板,所述定位气缸固定设置在料仓侧面的开口处,且定位气缸驱动定位板沿x轴方向往返移动。
9、进一步地,所述定位板靠近料仓的内侧面上开设有倒角。
10、进一步地,所述料仓的上端固定设置有导向条。
11、进一步地,所述升降模组还包括辅助轮,所述辅助轮枢接在料仓的侧面开口处,且辅助轮位于两组输送带之间。
12、本实用新型的有益效果为:本实用新型通过在设置两组升降模组,并将两组升降模组并排设置,堆叠成垛的托盘承载着工件被输送至输送机构处时,驱动电机驱动枢接轮转动,进而带动输送带转动,将承载着工件的托盘传送至料仓内,顶升模组驱动底盘移动,底盘从托盘的最低端将托盘托住,并垂直上升,利于其它加工机构直接对最顶层的工件进行加工,加工完成后,通过机械手将最顶层的托盘抓取并移送至另一组料仓内的底盘上,随着托盘的逐渐叠加,另一组顶升模组驱动底盘下移,最后成垛的托盘承载着加工完成的工件通过另一组输送机构从料仓内传送走,与传统技术中,需要机械手将工件抓取、上料、再次抓取、下料相比,本方案只需要机械手将加工完成的工件从其中一组料仓抓取、转移至另一组料仓内即可,从而节省了抓取、上料的工序,在工件的搬运上节约了时间,一定程度上提高了加工效率。
技术特征:
1.一种全自动对接生熟料升降料仓,其特征在于:包括两组并排设置的升降模组,
2.根据权利要求1所述的一种全自动对接生熟料升降料仓,其特征在于:所述料仓的侧壁上开设有观察孔。
3.根据权利要求1所述的一种全自动对接生熟料升降料仓,其特征在于:所述底盘上固定设置有定位销。
4.根据权利要求1所述的一种全自动对接生熟料升降料仓,其特征在于:所述顶升模组为z轴气缸。
5.根据权利要求1所述的一种全自动对接生熟料升降料仓,其特征在于:所述定位模组包括定位气缸、定位板,所述定位气缸固定设置在料仓侧面的开口处,且定位气缸驱动定位板沿x轴方向往返移动。
6.根据权利要求5所述的一种全自动对接生熟料升降料仓,其特征在于:所述定位板靠近料仓的内侧面上开设有倒角。
7.根据权利要求1所述的一种全自动对接生熟料升降料仓,其特征在于:所述料仓的上端固定设置有导向条。
8.根据权利要求1-7任意一项所述的一种全自动对接生熟料升降料仓,其特征在于:所述升降模组还包括辅助轮,所述辅助轮枢接在料仓的侧面开口处,且辅助轮位于两组输送带之间。
技术总结
本技术公开了一种全自动对接生熟料升降料仓,涉及工业设备技术领域,该方案包括两组并排设置的升降模组,所述升降模组包括料仓、输送机构、底盘、顶升模组和两组定位模组,所述料仓的前侧、上端和下端呈开口状,所述输送机构包括支撑架、驱动电机、两条输送带和四组枢接轮,所述支撑架固定设置在在料仓的底端,所述枢接轮枢接在支撑架上,每条输送带绕设在两组枢接轮上,且两条输送带均平行于Y轴方向设置,所述驱动电机驱动枢接轮转动,所述底盘位于料仓内,所述顶升模组驱动底盘在料仓内垂直升降,两组定位模组分别对称设置在料仓的两侧壁上;本技术减少了工件的搬运时间,一定程度上提高了加工效率。
技术研发人员:贺喜,袁仲强,鲁同双
受保护的技术使用者:广东爱吉尔机器人科技有限公司
技术研发日:20230201
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!