一种码垛机械手的制作方法
本技术涉及码垛机械手,具体是一种码垛机械手。
背景技术:
1、为充分利用托盘的面积和码堆物料的稳定性,机器人具有物料码垛顺序、排列设定器,利用码垛机械手能将不同外形尺寸的包装货物,整齐、自动地码在生产线上,码垛机械手的能力比普通机械式码垛、人力都还要高,结构非常简单、故障率低以及容易保养维修。
2、通过专门定制不同类型的机械手,以实现不同的抓取需求,通常来说机械手只针对特定的货物进行抓取,例如抓取箱垛或者纸箱,从而缺少同时满足抓取箱垛和纸箱的功能,导致机械手的抓取效率降低,另外一般的机械手抓取箱垛时,先下放机械手,随后再下放夹爪,而非同时进行,则会影响抓取速度,为此,需要一种码垛机械手来解决现有的不足。
技术实现思路
1、解决的技术问题
2、本实用新型的目的就是为了弥补现有技术的不足,提供了一种码垛机械手。
3、技术方案
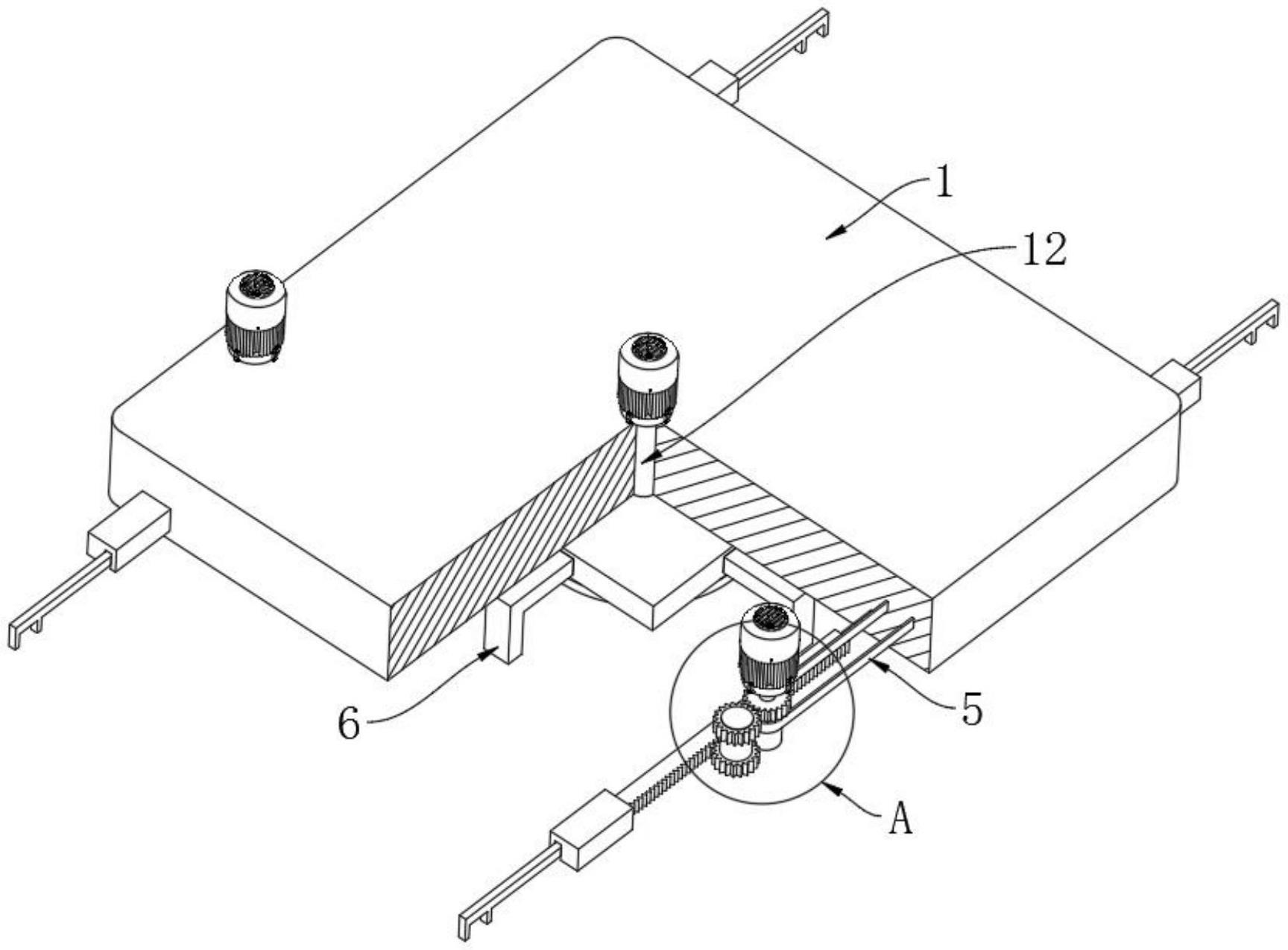
4、为实现上述目的,本实用新型提供如下技术方案:一种码垛机械手,包括安装板,所述安装板的内部活动连接有两组对称的齿条,所述齿条的相对侧活动连接有导杆,所述齿条的另一端活动连接有夹块,且夹块呈f字形,所述夹块位于安装板的外侧,所述安装板的内部活动连接有一组对称的伸展机构,且伸展机构分别与齿条活动连接,所述安装板的底端设置有夹箱机构。
5、上述的,所述伸展机构包括齿轮一、齿轮二、齿轮三、齿轮四和同步带,所述齿轮一的顶端通过连接轴固定连接于齿轮二的底端,所述齿轮三和齿轮四均通过转轴活动连接于安装板的内部,所述同步带套设于齿轮三的转轴和齿轮四的转轴外侧,且同步带、齿轮三和齿轮四构成皮带传动结构。
6、上述的,所述齿轮一和齿轮四位于同一水平位置,且齿轮二和齿轮三位于同一水平位置,所述齿轮一与齿条相啮合,且齿轮四与另一齿条相啮合。
7、上述的,所述安装板的顶端固定连接有伺服电机一,所述伺服电机一的输出端与齿轮三的转轴固定连接,且齿轮二与齿轮三相啮合。
8、上述的,所述齿条远离导杆的一端均固定连接有安装块,且安装块的内部固定连接有伺服电机二,所述夹块的一端通过转轴活动连接于安装块的内侧,且伺服电机二的输出端与夹块的转轴固定连接。
9、上述的,所述夹箱机构包括导向板、夹紧块、驱动盘和驱动柱,所述夹紧块的数量为四个且夹紧块均呈l字形,相邻所述夹紧块之间相垂直,且夹紧块的相对侧均活动连接于导向板的内部,所述夹紧块的底端均固定连接有驱动柱,且驱动柱的另一端均与驱动盘活动连接。
10、上述的,所述导向板的底端固定连接于安装板的底端,且导向板和驱动盘的相对侧具有间隙,所述驱动盘的表面开设有数个驱动槽,且驱动槽均呈弧形,所述驱动柱分别与驱动槽活动连接。
11、上述的,所述安装板的顶端固定连接有伺服电机三,所述伺服电机三的输出端固定连接有旋转杆,所述旋转杆依次贯穿安装板和导向板,且旋转杆均通过轴承与安装板和导向板活动连接,所述旋转杆的底端固定连接于驱动盘的顶端。
12、有益效果:
13、与现有技术相比,该一种码垛机械手具备如下有益效果:
14、一、本实用新型通过设置的伸展机构,启动伺服电机一,使齿轮一和齿轮四转速相同且方向相反,从而使两个齿条相互远离,同时启动伺服电机二,带动夹块向下转动,直至夹块底端与箱垛的边缘相互卡合,即可将箱垛进行固定,随后利用机械臂将箱垛进行转移,方便使夹块之间的宽度与箱垛的宽度相适配,从而方便将不同尺寸的箱垛进行夹持。
15、二、本实用新型通过设置的夹箱机构,另外需要转移纸箱时,启动伺服电机三,在旋转杆的作用下,带动驱动盘进行转动,从而弧形驱动槽发生转动,以此使驱动柱发生移动,从而带动夹紧块沿着导向板的内部相互靠近,直至将纸箱的四周夹紧,从而实现箱垛和纸箱的多功能夹持,提高了机械手的使用效率。
16、本实用新型的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本实用新型的实践中得到教导。
技术特征:
1.一种码垛机械手,包括安装板(1),其特征在于:所述安装板(1)的内部活动连接有两组对称的齿条(2),所述齿条(2)的相对侧活动连接有导杆(3),所述齿条(2)的另一端活动连接有夹块(4),且夹块(4)呈f字形,所述夹块(4)位于安装板(1)的外侧,所述安装板(1)的内部活动连接有一组对称的伸展机构(5),且伸展机构(5)分别与齿条(2)活动连接,所述安装板(1)的底端设置有夹箱机构(6)。
2.根据权利要求1所述的一种码垛机械手,其特征在于:所述伸展机构(5)包括齿轮一(501)、齿轮二(502)、齿轮三(503)、齿轮四(504)和同步带(505),所述齿轮一(501)的顶端通过连接轴固定连接于齿轮二(502)的底端,所述齿轮三(503)和齿轮四(504)均通过转轴活动连接于安装板(1)的内部,所述同步带(505)套设于齿轮三(503)的转轴和齿轮四(504)的转轴外侧,且同步带(505)、齿轮三(503)和齿轮四(504)构成皮带传动结构。
3.根据权利要求2所述的一种码垛机械手,其特征在于:所述齿轮一(501)和齿轮四(504)位于同一水平位置,且齿轮二(502)和齿轮三(503)位于同一水平位置,所述齿轮一(501)与齿条(2)相啮合,且齿轮四(504)与另一齿条(2)相啮合。
4.根据权利要求3所述的一种码垛机械手,其特征在于:所述安装板(1)的顶端固定连接有伺服电机一(7),所述伺服电机一(7)的输出端与齿轮三(503)的转轴固定连接,且齿轮二(502)与齿轮三(503)相啮合。
5.根据权利要求4所述的一种码垛机械手,其特征在于:所述齿条(2)远离导杆(3)的一端均固定连接有安装块(8),且安装块(8)的内部固定连接有伺服电机二(9),所述夹块(4)的一端通过转轴活动连接于安装块(8)的内侧,且伺服电机二(9)的输出端与夹块(4)的转轴固定连接。
6.根据权利要求1所述的一种码垛机械手,其特征在于:所述夹箱机构(6)包括导向板(601)、夹紧块(602)、驱动盘(603)和驱动柱(604),所述夹紧块(602)的数量为四个且夹紧块(602)均呈l字形,相邻所述夹紧块(602)之间相垂直,且夹紧块(602)的相对侧均活动连接于导向板(601)的内部,所述夹紧块(602)的底端均固定连接有驱动柱(604),且驱动柱(604)的另一端均与驱动盘(603)活动连接。
7.根据权利要求6所述的一种码垛机械手,其特征在于:所述导向板(601)的底端固定连接于安装板(1)的底端,且导向板(601)和驱动盘(603)的相对侧具有间隙,所述驱动盘(603)的表面开设有数个驱动槽(10),且驱动槽(10)均呈弧形,所述驱动柱(604)分别与驱动槽(10)活动连接。
8.根据权利要求7所述的一种码垛机械手,其特征在于:所述安装板(1)的顶端固定连接有伺服电机三(11),所述伺服电机三(11)的输出端固定连接有旋转杆(12),所述旋转杆(12)依次贯穿安装板(1)和导向板(601),且旋转杆(12)均通过轴承与安装板(1)和导向板(601)活动连接,所述旋转杆(12)的底端固定连接于驱动盘(603)的顶端。
技术总结
本技术公开了一种码垛机械手,涉及码垛机械手技术领域,包括安装板,所述安装板的内部活动连接有两组对称的齿条,所述齿条的相对侧活动连接有导杆,所述齿条的另一端活动连接有夹块,且夹块呈F字形,所述夹块位于安装板的外侧,所述安装板的内部活动连接有一组对称的伸展机构,且伸展机构分别与齿条活动连接,所述安装板的底端设置有夹箱机构。本技术通过设置的夹箱机构,另外需要转移纸箱时,启动伺服电机三,在旋转杆的作用下,带动驱动盘进行转动,从而弧形驱动槽发生转动,以此使驱动柱发生移动,从而带动夹紧块沿着导向板的内部相互靠近,直至将纸箱的四周夹紧,从而实现箱垛和纸箱的多功能夹持,提高了机械手的使用效率。
技术研发人员:蒋继海,蒋近飞,林超
受保护的技术使用者:安徽庞度环保科技有限公司
技术研发日:20230203
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!