一种双向取货机构及分拣装置的制作方法
本技术涉及分拣装置,特别是涉及一种双向取货机构及分拣装置。
背景技术:
1、申请人的在先专利cn217295851u中提供了一种仓储物流系统的工作站,其包括货架停靠位、工作台、取货机与缓存货架,其中,取货机能够在工作台的接驳位、缓存货架以及货架停靠位处的货架三者之间转运货物,取货机能够双向输送货物以实现上述功能,该专利中未公开取货单元的结构,现有技术中的取货装置难以达到稳定双向取货、出货的目的,特别是对于较重的货物,将货物移入移出较为困难,因此,需要设计一种能够稳定地双向取货出货、且结构紧凑的取货机构。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本实用新型提供一种能够稳定地双向取货出货、且结构紧凑的双向取货机构及分拣装置。
2、技术方案:为实现上述目的,本实用新型的双向取货机构,其包括座体,所述座体上安装有支撑传送装置;
3、所述座体上安装有两组抓取机构,两者分别用于从所述传送装置的两端移送分拣对象至所述传送装置;
4、所述抓取机构包括执行手爪与驱动机构;所述驱动机构能够使所述执行手爪在作业状态与避让状态之间切换,两种状态下,所述执行手爪的位置分别高于以及低于所述传送装置的上端;且在所述作业状态下,所述执行手爪能够带着分拣对象移动。
5、进一步地,所述抓取机构还包括导向轨道,所述执行手爪具备沿着所述导向轨道运动的导引部;所述导向轨道具有平直导向部与倾斜导向部,所述导引部沿着所述平直导向部运动时,所述执行手爪处于作业状态,所述导引部沿着倾斜导向部运动时,所述执行手爪处于避让状态。
6、进一步地,所述执行手爪通过两组滑动组件连接所述座体,两组所述滑动组件的导滑方向相互垂直。
7、进一步地,两组滑动组件分别为第一滑动组件与第二滑动组件,所述第一滑动组件包括相对于所述座体固定安装的第一滑轨以及沿所述第一滑轨滑动的第一滑块,所述第二滑动组件包括相对于所述第一滑块固定的第二滑块以及与所述第二滑块滑动配合的第二滑轨;所述执行手爪固定在所述第二滑轨上。
8、进一步地,所述驱动机构包括同步带、同步轮以及驱动所述同步轮转动的驱动电机;所述第一滑块连接所述同步带。
9、进一步地,所述执行手爪包括至少一个吸盘。
10、进一步地,所述支撑传送装置包括两组传送单元,两组所述传送单元之间留有供所述执行手爪运动的空隙。
11、进一步地,所述传送单元为传送带,两个所述传送单元被同一电动辊轴驱动运转。
12、进一步地,所述座体上还安装有居中机构,所述居中机构具有能够作用于分拣对象两侧的两个推挤单元。
13、一种分拣装置,其包括固定座,所述固定座上安装有双轴驱动机构,所述双轴驱动机构的末端安装有上述的双向取货机构。
14、有益效果:本实用新型的双向取货机构及分拣装置,通过设置支撑传送装置以及两组能够在工作状态与避让状态之间切换的抓取机构,使得取货机构能够双向取货、出货,取货过程中,执行手爪将分拣对象拖拽出货位并使其与支撑传送装置至少局部接触,后续由支撑传送装置继续传送,如此可解决较重的分拣对象的取货、出货难题。
技术特征:
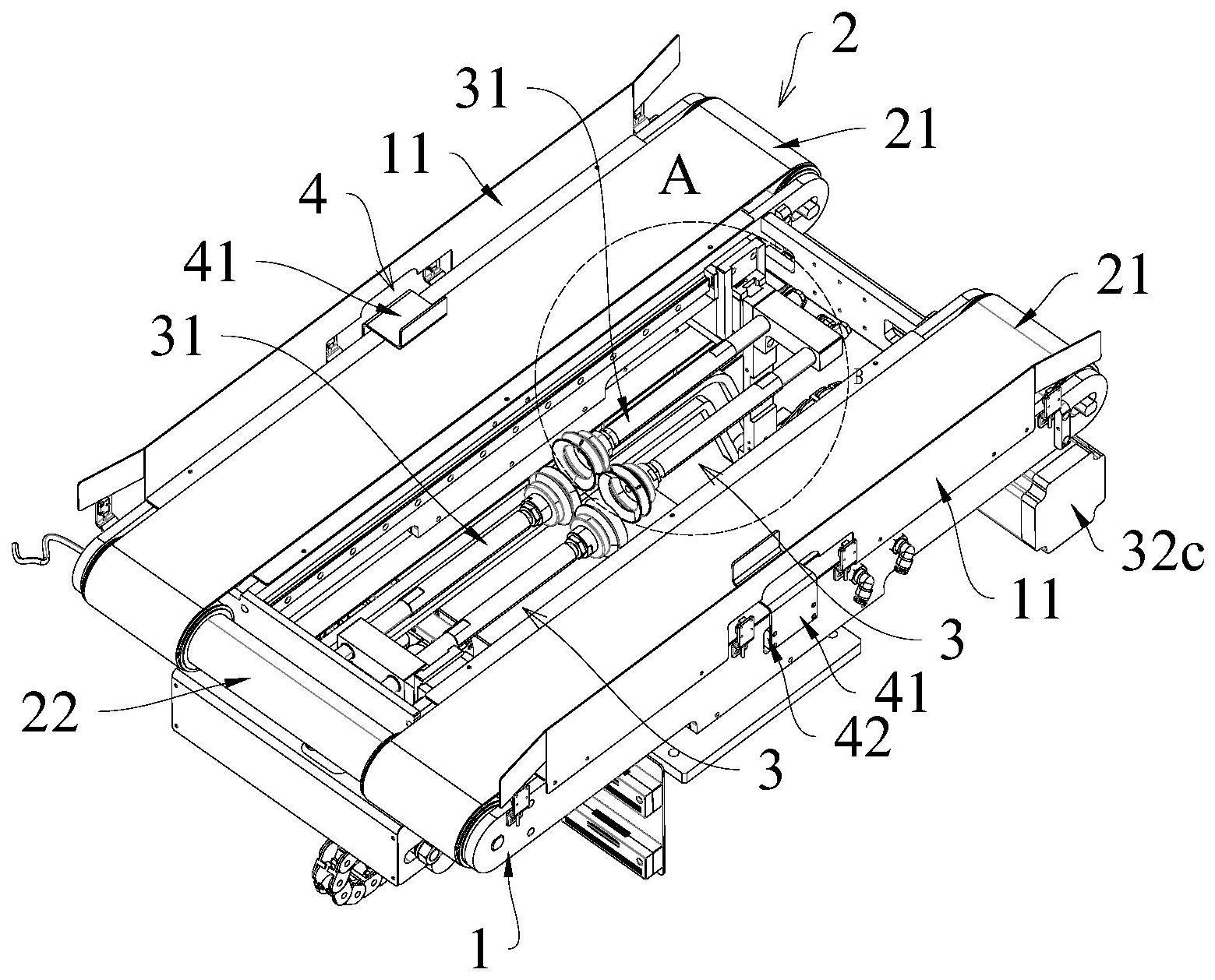
1.一种双向取货机构,其包括座体(1),所述座体(1)上安装有支撑传送装置(2);其特征在于:
2.根据权利要求1所述的双向取货机构,其特征在于,所述抓取机构(3)还包括导向轨道(33),所述执行手爪(31)具备沿着所述导向轨道(33)运动的导引部(311);所述导向轨道(33)具有平直导向部(33a)与倾斜导向部(33b),所述导引部(311)沿着所述平直导向部(33a)运动时,所述执行手爪(31)处于作业状态,所述导引部(311)沿着倾斜导向部(33b)运动时,所述执行手爪(31)处于避让状态。
3.根据权利要求1所述的双向取货机构,其特征在于,所述执行手爪(31)通过两组滑动组件连接所述座体(1),两组所述滑动组件的导滑方向相互垂直。
4.根据权利要求3所述的双向取货机构,其特征在于,两组滑动组件分别为第一滑动组件(34)与第二滑动组件(35),所述第一滑动组件(34)包括相对于所述座体(1)固定安装的第一滑轨(34a)以及沿所述第一滑轨(34a)滑动的第一滑块(34b),所述第二滑动组件(35)包括相对于所述第一滑块(34b)固定的第二滑块(35a)以及与所述第二滑块(35a)滑动配合的第二滑轨(35b);所述执行手爪(31)固定在所述第二滑轨(35b)上。
5.根据权利要求4所述的双向取货机构,其特征在于,所述驱动机构(32)包括同步带(32a)、同步轮(32b)以及驱动所述同步轮(32b)转动的驱动电机(32c);所述第一滑块(34b)连接所述同步带(32a)。
6.根据权利要求1所述的双向取货机构,其特征在于,所述执行手爪(31)包括至少一个吸盘(31a)。
7.根据权利要求1所述的双向取货机构,其特征在于,所述支撑传送装置(2)包括两组传送单元(21),两组所述传送单元(21)之间留有供所述执行手爪(31)运动的空隙。
8.根据权利要求7所述的双向取货机构,其特征在于,所述传送单元(21)为传送带,两个所述传送单元(21)被同一电动辊轴(22)驱动运转。
9.根据权利要求1所述的双向取货机构,其特征在于,所述座体(1)上还安装有居中机构(4),所述居中机构(4)具有能够作用于分拣对象两侧的两个推挤单元(41)。
10.一种分拣装置,其特征在于,其包括固定座(5),所述固定座(5)上安装有双轴驱动机构(6),所述双轴驱动机构(6)的末端安装有权利要求1-9任一项所述的双向取货机构。
技术总结
本技术公开了一种双向取货机构,其包括座体,座体上安装有支撑传送装置;座体上安装有两组抓取机构,两者分别用于从传送装置的两端移送分拣对象至传送装置;抓取机构包括执行手爪与驱动机构;驱动机构能够使执行手爪在作业状态与避让状态之间切换,两种状态下,执行手爪的位置分别高于以及低于传送装置的上端;且在作业状态下,执行手爪能够带着分拣对象移动。本技术通过设置支撑传送装置以及两组能够在工作状态与避让状态之间切换的抓取机构,使得取货机构能够双向取货、出货,取货过程中,执行手爪将分拣对象拖拽出货位并使其与支撑传送装置至少局部接触,后续由支撑传送装置继续传送,如此可解决较重的分拣对象的取货、出货难题。
技术研发人员:李学志,钟芳明
受保护的技术使用者:牧星机器人(江苏)有限公司
技术研发日:20230201
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!