一种装箱机的制作方法
本技术涉及装箱,具体而言,涉及一种装箱机。
背景技术:
1、对于许多物品来说,需要经过装箱打包后,才能便于运输和储存,例如随着农业现代化的发展,采用机械设备进行果蔬装箱,相对于人工装箱来说,效率更高,成本更低。
2、现有技术中,用于果蔬装箱的装箱机,在作业过程中,装箱机的作用区域仅能一个平面内进行上下方向的调整,存在作业范围小的问题。
技术实现思路
1、本实用新型提供了一种装箱机,其能够扩大装箱的作业范围。
2、本实用新型的实施例可以这样实现:
3、本实用新型的实施例提供了一种装箱机,其包括:
4、架体;
5、输送机构,所述输送机构可转动地连接于所述架体,所述输送机构用于输送装箱物品;
6、伸缩驱动件,所述伸缩驱动件和所述输送机构驱动连接,所述伸缩驱动件用于驱动所述输送机构相对于所述架体转动,以使所述输送机构在第一平面内转动;以及
7、旋转驱动件,所述旋转驱动件和所述架体驱动连接,所述旋转驱动件用于驱动所述架体在第二平面内转动;
8、其中,所述第一平面和所述第二平面呈夹角分布。
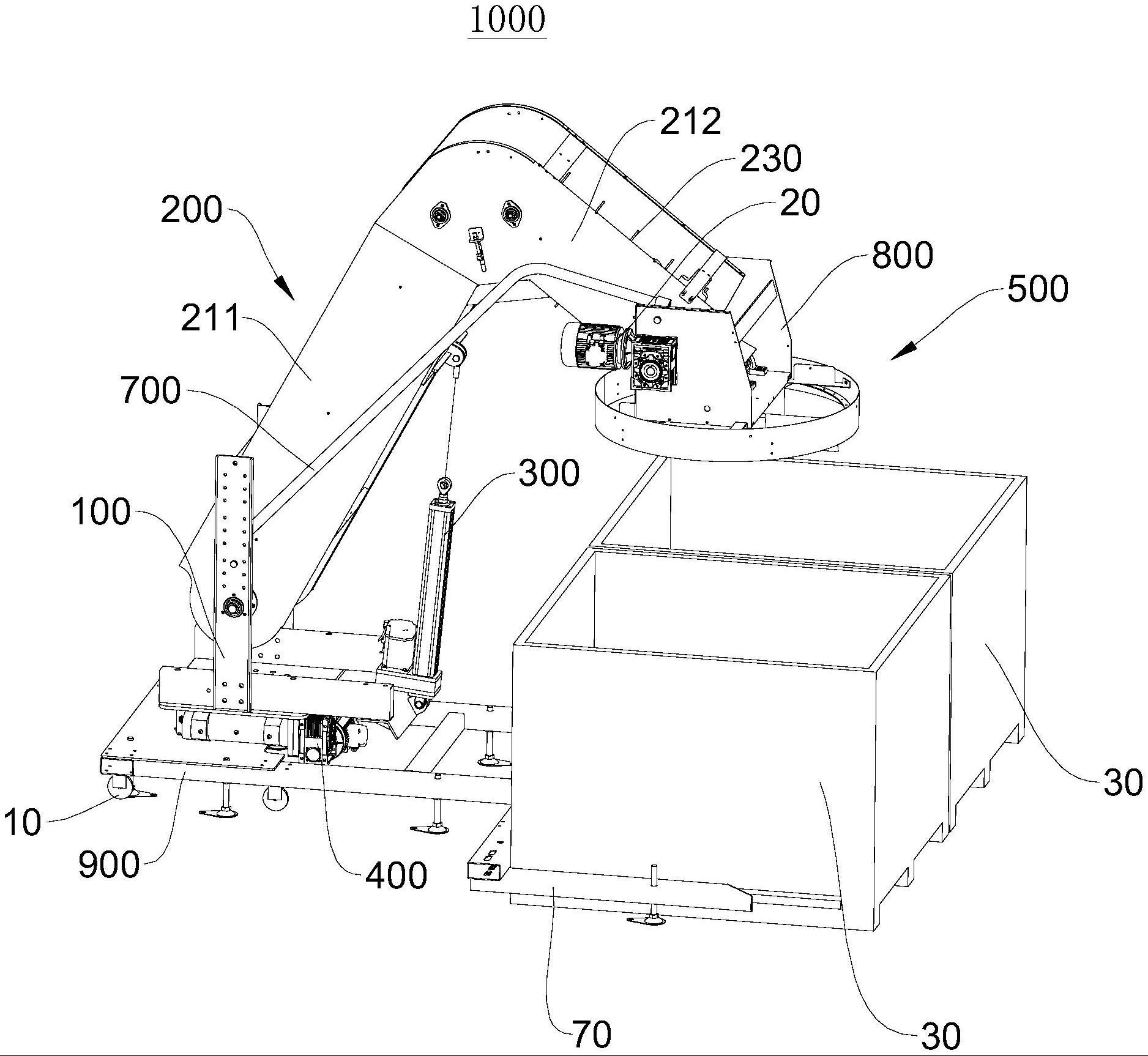
9、上述技术方案中,该装箱机包括架体、输送机构、伸缩驱动件以及旋转驱动件,输送机构可转动地连接于架体,输送机构用于输送装箱物品,伸缩驱动件和输送机构驱动连接,伸缩驱动件用于驱动输送机构相对于架体转动,以使输送机构在第一平面内转动,旋转驱动件和架体驱动连接,旋转驱动件用于驱动架体在第二平面内转动,其中,第一平面和第二平面呈夹角分布,由于旋转驱动件可以驱动架体在第二平面内转动,同时,输送机构可以在第一平面内转动,即,使输送机构可以在第二平面和第一平面内的不同区域作业,扩大了装箱的作业范围。
10、可选地,所述输送机构包括输送臂、传送带以及隔板,所述输送臂可转动地连接于所述架体,所述伸缩驱动件和所述输送臂驱动连接,所述伸缩驱动件用于驱动所述输送臂相对于所述架体转动,所述传送带可转动地绕设于所述输送臂上,所述隔板设置在所述传送带上,所述隔板用于抵接所述装箱物品,以输送装箱物品。
11、上述技术方案中,通过隔板来阻挡装箱物品向后掉落,避免装箱物品掉落损坏。
12、可选地,所述隔板的数目为多个,多个所述隔板间隔设置在所述传送带上。
13、上述技术方案中,通过在传送带上设置多个隔板,提高装箱物品的输送效率。
14、可选地,所述输送臂包括第一臂体和第二臂体,所述第一臂体和所述第二臂体呈夹角连接,所述传送带可转动地绕设于所述第一臂体和所述第二臂体上,所述第一臂体可转动地连接于所述架体,所述伸缩驱动件和所述第一臂体驱动连接。
15、上述技术方案中,第一臂体和第二臂体呈夹角连接,能够扩大装箱作业范围,便于将装箱物品掉落至箱体内。
16、可选地,所述装箱机还包括落果装置,所述落果装置包括环形转盘、安装架以及柔性缓冲板,所述柔性缓冲板安装在所述安装架上,所述安装架连接于所述环形转盘内,且所述安装架上限定出掉落通道;
17、其中,所述柔性缓冲板用于在所述装箱物品经过掉落通道的情况下,接触所述装箱物品。
18、上述技术方案中,由于柔性缓冲板可以在装箱物品经过掉落通道的情况下,接触装箱物品,可以对装箱物品在掉落过程中提供一个缓冲力,减少装箱物品在掉落至箱体内的过程中,出现的损坏情况。
19、可选地,所述安装架可转动地连接于所述输送臂的端部。
20、上述技术方案中,通过安装架转动,进而可以带动柔性缓冲板旋转,以对箱体内的装箱物品进行扫动,使箱体内的装箱物品更加平整。
21、可选地,所述落果装置还包括传感器,所述传感器安装在所述落果装置上,所述传感器同时和所述伸缩驱动件以及所述旋转驱动件电连接,所述传感器用于获取箱体内装箱物品的堆积状态。
22、上述技术方案中,通过传感器获取箱体内装箱物品的堆积状态,并将信号可以反馈给伸缩驱动件以及旋转驱动件,方便变换装箱物品掉落位置。
23、可选地,所述装箱机还包括连接杆以及转盘安装架,所述转盘安装架安装在所述输送臂的一端,所述安装架可转动地连接于所述转盘安装架;
24、其中,所述连接杆的一端同时可转动地连接于所述架体以及所述输送臂的一端,所述连接杆的另一端可转动地连接于所述架体或所述输送臂的另一端。
25、上述技术方案中,通过连接杆连接转盘安装架,同时连接杆也连接在输送臂以及架体上,可以提高转盘安装架的安装牢固程度,进而保持落果装置的安装架的牢固程度,避免安装架的晃动。
26、可选地,所述装箱机还包括底座以及移动轮,所述旋转驱动件安装在所述底座上,所述移动轮安装在所述底座。
27、上述技术方案中,通过在底座上设置移动轮,便于整个装箱机的移动。
28、可选地,所述装箱机还包括箱体夹,所述箱体夹和所述底座固定连接,所述箱体夹用于夹持箱体。
29、上述技术方案中,箱体架可以夹持箱体,避免在装箱过程中,箱体偏离预定的装箱位置。
技术特征:
1.一种装箱机,其特征在于,包括:
2.根据权利要求1所述的装箱机,其特征在于,所述输送机构(200)包括输送臂(210)、传送带(220)以及隔板(230),所述输送臂(210)可转动地连接于所述架体(100);
3.根据权利要求2所述的装箱机,其特征在于,所述隔板(230)的数目为多个,多个所述隔板(230)间隔设置在所述传送带(220)上。
4.根据权利要求2所述的装箱机,其特征在于,所述输送臂(210)包括第一臂体(211)和第二臂体(212),所述第一臂体(211)和所述第二臂体(212)呈夹角连接,所述传送带(220)可转动地绕设于所述第一臂体(211)和所述第二臂体(212)上,所述第一臂体(211)可转动地连接于所述架体(100),所述伸缩驱动件(300)和所述第一臂体(211)驱动连接。
5.根据权利要求2所述的装箱机,其特征在于,所述装箱机还包括落果装置(500),所述落果装置(500)包括环形转盘(510)、安装架(520)以及柔性缓冲板(530),所述柔性缓冲板(530)安装在所述安装架(520)上,所述安装架(520)连接于所述环形转盘(510)内,且所述安装架(520)上限定出掉落通道(501);
6.根据权利要求5所述的装箱机,其特征在于,所述安装架(520)可转动地连接于所述输送臂(210)的端部。
7.根据权利要求5所述的装箱机,其特征在于,所述落果装置(500)还包括传感器,所述传感器安装在所述落果装置(500)上,所述传感器同时和所述伸缩驱动件(300)以及所述旋转驱动件(400)电连接,所述传感器用于获取箱体(30)内装箱物品(60)的堆积状态。
8.根据权利要求6所述的装箱机,其特征在于,所述装箱机还包括连接杆(700)以及转盘安装架(800),所述转盘安装架(800)安装在所述输送臂(210)的一端,所述安装架(520)可转动地连接于所述转盘安装架(800);
9.根据权利要求1所述的装箱机,其特征在于,所述装箱机还包括底座(900)以及移动轮(10),所述旋转驱动件(400)安装在所述底座(900)上,所述移动轮(10)安装在所述底座(900)。
10.根据权利要求9所述的装箱机,其特征在于,所述装箱机还包括箱体夹(70),所述箱体夹(70)和所述底座(900)固定连接,所述箱体夹(70)用于夹持箱体(30)。
技术总结
本技术的实施例提供了一种装箱机,涉及装箱技术领域。该装箱机包括架体、输送机构、伸缩驱动件以及旋转驱动件,输送机构可转动地连接于架体,输送机构用于输送装箱物品,伸缩驱动件和输送机构驱动连接,伸缩驱动件用于驱动输送机构相对于架体转动,以使输送机构在第一平面内转动,旋转驱动件和架体驱动连接,旋转驱动件用于驱动架体在第二平面内转动,其中,第一平面和第二平面呈夹角分布,由于旋转驱动件可以驱动架体在第二平面内转动,同时,输送机构可以在第一平面内转动,即,使输送机构可以在第二平面和第一平面内的不同区域作业,扩大了装箱的作业范围。
技术研发人员:朱二,朱壹
受保护的技术使用者:江西绿萌科技控股有限公司
技术研发日:20230207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!