桁架式抓取机器人的制作方法
本技术涉及一种桁架式抓取机器人。
背景技术:
1、目前在工业生产流水线上,会涉及到工件在两个流水线之间进行转移,有些公司使用移动搬运机器人,比如公开号为cn105459095a、授权公告日为2016年04月06日的专利文献。
2、有些公司使用种智能运输机器人,比如公开号为cn109590977a、授权公告日为2019年04月09日的专利文献。
3、但是,这些设备都不方便对桶状工件进行抓取。
技术实现思路
1、本实用新型要解决的技术问题:如何设计出一种桁架式抓取机器人,能够对桶状工件进行抓取,来适应桶状工件在两个流水线之间进行转移。
2、本实用新型的技术方案具体为:
3、一种桁架式抓取机器人,包括桁架式机架,桁架式机架设有两个x轴轨道,两个x轴轨道之间设有能够沿其滑动的x轴滑块,x轴滑块上设有y轴轨道,y轴轨道上设有能够沿其滑动的y轴滑块,y轴滑块固定伸缩机构的固定部,伸缩机构的移动部的下端固定抓取机构,伸缩机构沿z轴设置,抓取机构包括旋转机构,旋转机构的固定部固定在伸缩机构的移动部的下端,旋转机构的旋转部固定抓取梁,抓取梁的下部设有一对电动夹手,电动夹手能沿抓取梁滑动。
4、抓取梁上固定摄像头传感器。
5、电动夹手与抓取梁之间设有减震装置。
6、电动夹手上设有红外传感器。
7、相对于现有技术,本实用新型的技术效果为,本实用新型设有一对电动夹手,方便对桶状工件进行抓取,再利用三维运动机构进行转移,方便桶状工件在两个流水线之间进行转移。
技术特征:
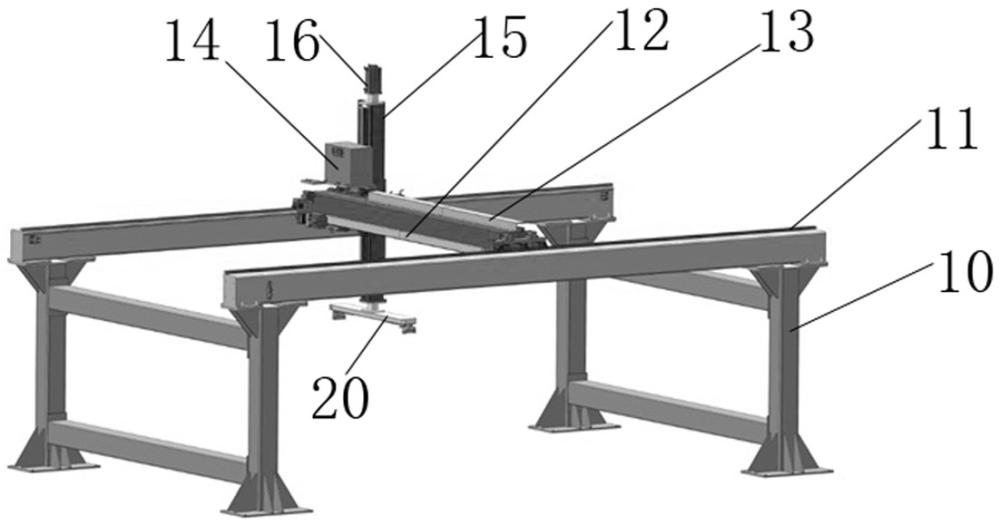
1.一种桁架式抓取机器人,包括桁架式机架(10),桁架式机架(10)设有两个x轴轨道(11),两个x轴轨道(11)之间设有能够沿其滑动的x轴滑块(12),x轴滑块(12)上设有y轴轨道(13),y轴轨道(13)上设有能够沿其滑动的y轴滑块(14),y轴滑块(14)固定伸缩机构的固定部(15),伸缩机构的移动部(16)的下端固定抓取机构(20),伸缩机构沿z轴设置,其特征在于:
2.如权利要求1所述的桁架式抓取机器人,其特征在于:抓取梁(22)上固定摄像头传感器(25)。
3.如权利要求2所述的桁架式抓取机器人,其特征在于:电动夹手(23)与抓取梁(22)之间设有减震装置(26)。
4.如权利要求3所述的桁架式抓取机器人,其特征在于:电动夹手(23)上设有红外传感器(24)。
技术总结
一种桁架式抓取机器人,包括桁架式机架,桁架式机架设有两个X轴轨道,两个X轴轨道之间设有能够沿其滑动的X轴滑块,X轴滑块上设有Y轴轨道,Y轴轨道上设有能够沿其滑动的Y轴滑块,Y轴滑块固定伸缩机构的固定部,伸缩机构的移动部的下端固定抓取机构,伸缩机构沿Z轴设置,抓取机构包括旋转机构,旋转机构的固定部固定在伸缩机构的移动部的下端动。相对于现有技术,本技术的技术效果为,本技术设有一对电动夹手,方便对桶状工件进行抓取,再利用三维运动机构进行转移,方便桶状工件在两个流水线之间进行转移。
技术研发人员:傅裕,张嫚,柳帅蒙,王旭超,张贝贝,杨增阳,赵红波,郭海钦,步向辉
受保护的技术使用者:清研自动化技术(洛阳)有限公司
技术研发日:20230308
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!