一种四向穿梭式搬运机器人的制作方法
本申请涉及一种四向穿梭式搬运机器人,属于自动化仓储物流。
背景技术:
1、随着土地成本和人工成本的上涨,密集仓储这一概念越来越受到物流公司和电商公司的关注。自动化立体仓库由于具有很高的空间利用率、很强的出入库能力,已成为企业物流和生产管理不可缺少的仓储技术,在汽车、化工、电子、烟草等行业的应用逐年增长。未来几年,自动化立体仓储系统的技术发展趋势之一表现为高速度、高效率、高密度。
2、为适应密集存储托盘货物,提高单位空间的存储货物的数量,就需要一款四向穿梭式搬运机器人来完成托盘货物的转运。市场上的四向穿梭式搬运机器人存在很多局限:如专利号为cn 212447846 u,名称为一种四向行走搬运车,通过设置两条传动轴驱动两个方向上的行走轮进行行走,实现搬运车的四向运动,每条传动轴驱动一侧的行走轮进行行走,构成单侧驱动行走方式。但此类搬运车在实际使用时,两条交叉的传动轴由于需要进行升降进行行走换向和顶升货物。由于四向搬运车为了在存储空间小的仓储系统内进行承重搬运,搬运车多设计为车架高度小,车架距离地面高度小的结构构造。由此会导致两条传动轴在升降过程中,会发生空间冲突,而为了避免传动轴发生冲突,现有的搬运车的升降行程较小,使用效果差。
3、另外此类搬运车由于采用的是单侧驱动行走方式,在仓储使用中,车架距离地面距离小,当地面出现高度变化时,搬运车的车架会出现单侧悬空,此时主动轮侧的车架由于悬空,而无法将动力传递至从动轮而导致机器人卡住不能移动的情况。并且现有的搬运车多采用八套螺杆升降机实现双向升降,成本较高,在实际案例中存在局限性,因此亟需一种搬运机器人来解决现有搬运机器人因空间限制导致使用效果差,制造成本高的问题。
技术实现思路
1、对现有技术中存在的问题与不足,本申请提供一种四向穿梭式搬运机器人,通过在机架行走方向的两侧行走轮之间设置连接组件,实现两侧行走轮同步转动行走,以解决机器人单侧悬空时,未悬空侧的行走轮能继续转动,进而带动机架继续行走。通过在两条交叉的传动轴的一条传动轴的两端设置传动副轴,以实现两条传动轴在升降过程中不会发生空间冲突,提高机架的升降行程,提高搬运机器人的使用范围。
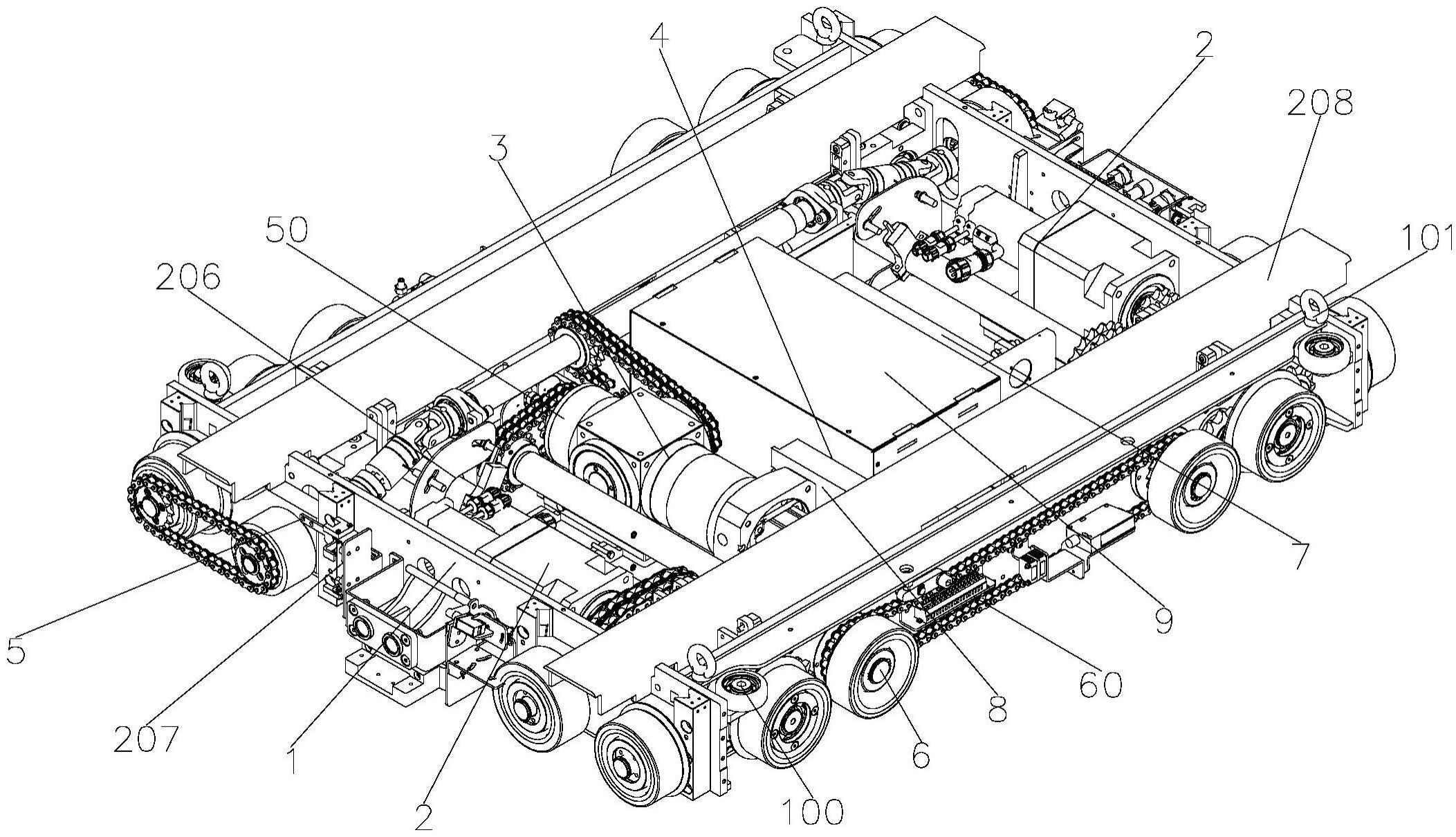
2、为实现上述目的,本申请提供如下技术方案:一种四向穿梭式搬运机器人,包括机架以及设置在机架内的升降机构、行走机构和动力机构,升降机构和行走机构由动力机构控制运转,机架的四周安装行走轮;行走轮根据安装于机架不同方向分为主通道行走轮和副通道行走轮,行走机构包括传动组件、驱动组件和连接组件;主通道行走轮对称设置在机架在主通道运行方向的两侧,副通道行走轮对称设置在机架在副通道运行方向的两侧;主通道行走轮和副通道行走轮通过传动组件与动力机构连接;在机架至少一个运动方向上的两侧的行走轮之间连接有连接组件,用于该运动方向上的行走轮经动力机构动力驱动进行同步转动行走;
3、传动组件包括两条在空间上交叉的第一传动轴和第二传动轴,第一传动轴和第二传动轴通过驱动组件分别与动力机构连接,用于驱动机架四周的行走轮;第一传动轴和第二传动轴中至少一条传动轴的两端设有与该传动轴轴线不相同的传动副轴,传动副轴与行走轮相连,且传动副轴以及与之相连的行走轮由升降机构带动升降。
4、具体的,主通道行走轮与第一传动轴驱动连接,副通道行走轮与第二传动轴驱动连接;第一传动轴的两端设有与第一传动轴轴线不相同的传动副轴。
5、具体的,主通道行走轮包括一对主动主通道轮和一对从动主通道轮,主动主通道轮和从动主通道轮相对设置于机架的两侧;一对主动主通道轮通过传动副轴与第一传动轴相连,主通道行走轮以及传动副轴由升降机构带动升降。
6、具体的,传动副轴的一端穿出机架侧壁上的腰形孔,并与主动主通道轮相连,相邻主动主通道轮之间通过第三链轮副相连,传动副轴的另一端与第一传动轴连接,且传动副轴的两端分别设有万向轴连接器,传动副轴通过万向轴连接器分别与第一传动轴和其中一个主动主通道轮相连。
7、具体的,副通道行走轮包括两个主动副通道轮和两个从动副通道轮,两个主动副通道轮相对设置在单侧机架的两边,两个从动副通道轮分别转动安装于主动副通道轮侧面的机架;机架两侧的主动副通道轮构成相对的两组主动副通道轮,第二传动轴的两端与其中一组主动副通道轮连接;机架同侧的两个主动副通道轮之间连接有连接组件。
8、具体的,连接组件包括两个驱动齿、传动链条和链条涨紧齿轮;两个驱动齿分别固定套设于两个主动副通道轮的转轴外侧,传动链条套设于两个驱动齿外侧,且其通过链条涨紧齿轮调节传动链条的涨紧度。
9、具体的,升降机构由两组分别安装在机架内的链条升降单元构成,每组链条升降单元控制一侧的主通道行走轮升降;每组链条升降单元包括两个升降减速电机、升降传动轴、刚性链条传动副和两个链条升降机,安装在机架同侧的两个链条升降机通过升降传动轴相连,升降传动轴由刚性链条传动副与升降减速电机连接驱动;链条升降机的顶部输出轴驱动顶升板托举货物,顶升板一端沿水平方向朝机架外侧延伸,形成一延伸端;延伸端的底部固定安装有滑动块;滑动块沿径向滑动安装于机架,且主通道轮转动安装于滑动块。
10、具体的,驱动组件包括行走电机和双出轴减速机,双出轴减速机的两组输出轴分别通过第一链轮副和第二链轮副与第一传动轴和第二传动轴相连。
11、具体的,升降传动轴的侧边安装三挡升降位置高度传感器;滑动块的侧边安装有位置传感器;升降位置高度传感器和位置传感器分别与动力机构相连。
12、具体的,动力机构包括电池、驱动器和plc控制器;plc控制器一端与驱动器连接,另一端与电池连接;行走电机和升降减速电机分别与驱动器电性连接,升降位置高度传感器和位置传感器分别与plc控制器电性连接。
13、与现有技术相比,本申请的有益效果在于:
14、本申请的四向穿梭式搬运机器人,通过在第一传动轴的两端分别设置与第一传动轴轴线不相同的传动副轴,之间通过万向轴连接器进行连接。通过万向轴连接器实现动力传递的同时,又可实现搬运机器人在升降换向或顶升货物时,传动副轴与第二传动轴不会发生空间冲突,可减小搬运机器人的高度,且升级机的升降行程大,实现提高搬运机器人使用范围。
15、在前述的基础上,本申请通过在两个主动副通道轮之间的设置连接组件,使得两个主动副通道轮运动同步,实现搬运机器人在移动时,避免机架因路面平整度发生变化时,机器人的机架发生卡滞,导致无法移动的情况,提高搬运机器人的运载能力。使用者亦可根据实际使用环境,将主通道行走轮之间设置为相同的连接组件,使得机架在主通道运行方向实现行走轮的同步转动,进而避免机架在主通道运行方向上避免机架卡滞。
16、在前述基础上,本申请采用四套全新设计链条升降机构实现车辆主通道轮组件的双向顶升和对货物的举升,节约了搬运机器人的整体空间,降低设备的造价。
技术特征:
1.一种四向穿梭式搬运机器人,包括机架以及设置在所述机架内的升降机构、行走机构和动力机构,所述升降机构和行走机构由所述动力机构控制运转,所述机架的四周安装行走轮;其特征在于:
2.根据权利要求1所述的一种四向穿梭式搬运机器人,其特征在于:所述主通道行走轮与所述第一传动轴驱动连接,所述副通道行走轮与所述第二传动轴驱动连接;所述第一传动轴的两端设有与第一传动轴轴线不相同的传动副轴。
3.根据权利要求2所述的一种四向穿梭式搬运机器人,其特征在于:所述主通道行走轮包括一对主动主通道轮和一对从动主通道轮,所述主动主通道轮和从动主通道轮相对设置于机架的两侧;一对主动主通道轮通过传动副轴与第一传动轴相连,所述主通道行走轮以及所述传动副轴由升降机构带动升降。
4.根据权利要求3所述的一种四向穿梭式搬运机器人,其特征在于:所述传动副轴的一端穿出所述机架侧壁上的腰形孔,并与所述主动主通道轮相连,相邻主动主通道轮之间通过第三链轮副相连,传动副轴的另一端与所述第一传动轴连接,且传动副轴的两端分别设有万向轴连接器,传动副轴通过万向轴连接器分别与第一传动轴和其中一个主动主通道轮相连。
5.根据权利要求2所述的一种四向穿梭式搬运机器人,其特征在于:所述副通道行走轮包括两个主动副通道轮和两个从动副通道轮,两个所述主动副通道轮相对设置在单侧机架的两边,两个从动副通道轮分别转动安装于主动副通道轮侧面的机架;机架两侧的主动副通道轮构成相对的两组主动副通道轮,所述第二传动轴的两端与其中一组主动副通道轮连接;机架同侧的两个主动副通道轮之间连接有所述连接组件。
6.根据权利要求5所述的一种四向穿梭式搬运机器人,其特征在于:所述连接组件包括两个驱动齿、传动链条和链条涨紧齿轮;两个所述驱动齿分别固定套设于两个主动副通道轮的转轴外侧,所述传动链条套设于两个驱动齿外侧,且其通过链条涨紧齿轮调节传动链条的涨紧度。
7.根据权利要求6所述的一种四向穿梭式搬运机器人,其特征在于:所述升降机构由两组分别安装在所述机架内的链条升降单元构成,每组链条升降单元控制一侧的所述主通道行走轮升降;每组所述链条升降单元包括两个升降减速电机、升降传动轴、刚性链条传动副和两个链条升降机,安装在所述机架同侧的两个链条升降机通过所述升降传动轴相连,所述升降传动轴由所述刚性链条传动副与升降减速电机连接驱动;所述链条升降机的顶部输出轴驱动顶升板托举货物,所述顶升板一端沿水平方向朝机架外侧延伸,形成一延伸端;所述延伸端的底部固定安装有滑动块;所述滑动块沿径向滑动安装于机架,且主通道轮转动安装于滑动块。
8.根据权利要求7所述的一种四向穿梭式搬运机器人,其特征在于:所述驱动组件包括行走电机和双出轴减速机,所述双出轴减速机的两组输出轴分别通过第一链轮副和第二链轮副与所述第一传动轴和第二传动轴相连。
9. 根据权利要求8所述的一种四向穿梭式搬运机器人,其特征在于: 所述升降传动轴的侧边安装三挡升降位置高度传感器;所述滑动块的侧边安装有位置传感器;所述升降位置高度传感器和位置传感器分别与所述动力机构相连。
10.根据权利要求9所述的一种四向穿梭式搬运机器人,其特征在于:所述动力机构包括电池、驱动器和plc控制器;所述plc控制器一端与驱动器连接,另一端与电池连接;所述行走电机和升降减速电机分别与所述驱动器电性连接,所述升降位置高度传感器和位置传感器分别与plc控制器电性连接。
技术总结
本技术涉及一种四向穿梭式搬运机器人,属于自动化仓储物流技术领域。为解决现有四向搬运机器人受空间限制导致使用效果差,制造成本高的问题。本申请包括机架、升降机构、行走机构和动力机构,机架的四周安装有行走轮,行走轮包括主通道行走轮和副通道行走轮,行走机构包括传动组件、驱动组件和连接组件;传动组件设有两条交叉的传动轴,两条传动轴通过驱动组件分别与动力机构连接,用于驱动机架四周的行走轮,至少一条传动轴上设有传动副轴,避免行走轮在升降过程中与另一条传动轴发生冲突,提高机架的升降行程。在一侧的行走轮之间设置连接组件,实现行走轮经动力机构动力驱动进行同步转动行走,提高搬运机器人的使用范围。
技术研发人员:周义术,姚刚
受保护的技术使用者:南京华德仓储设备制造有限公司
技术研发日:20230308
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!