一种用于自动搬运电池装载小车的超重载堆垛机的制作方法
本技术涉及锂电池设备生产,具体涉及一种用于自动搬运电池装载小车的超重载堆垛机。
背景技术:
1、随着我国科技的不断发展,动力电池所应用范围的越来越广泛,体积大,容量大的方型动力电池正被可充电池生产厂家所研制生产,同时也越来越多地受到使用者的认可。而由于动力电池的生产过程和工艺复杂,各个工序的设备多,而且动力电池体积大,重量重,人工搬运和上料极其困难,也存在极大的安全隐患。故用于动力电池自动搬运的堆垛机装置被广泛使用。而随着动力电池的重量逐渐增加,常规堆垛机已逐渐无法满足正常工作需求,工作效率较低。这些不足之处严重限制了动力电池产量的提高和新产品的问世。
技术实现思路
1、本实用新型的目的是提供一种用于自动搬运电池装载小车的超重载堆垛机,以解决现有技术中的上述不足之处。
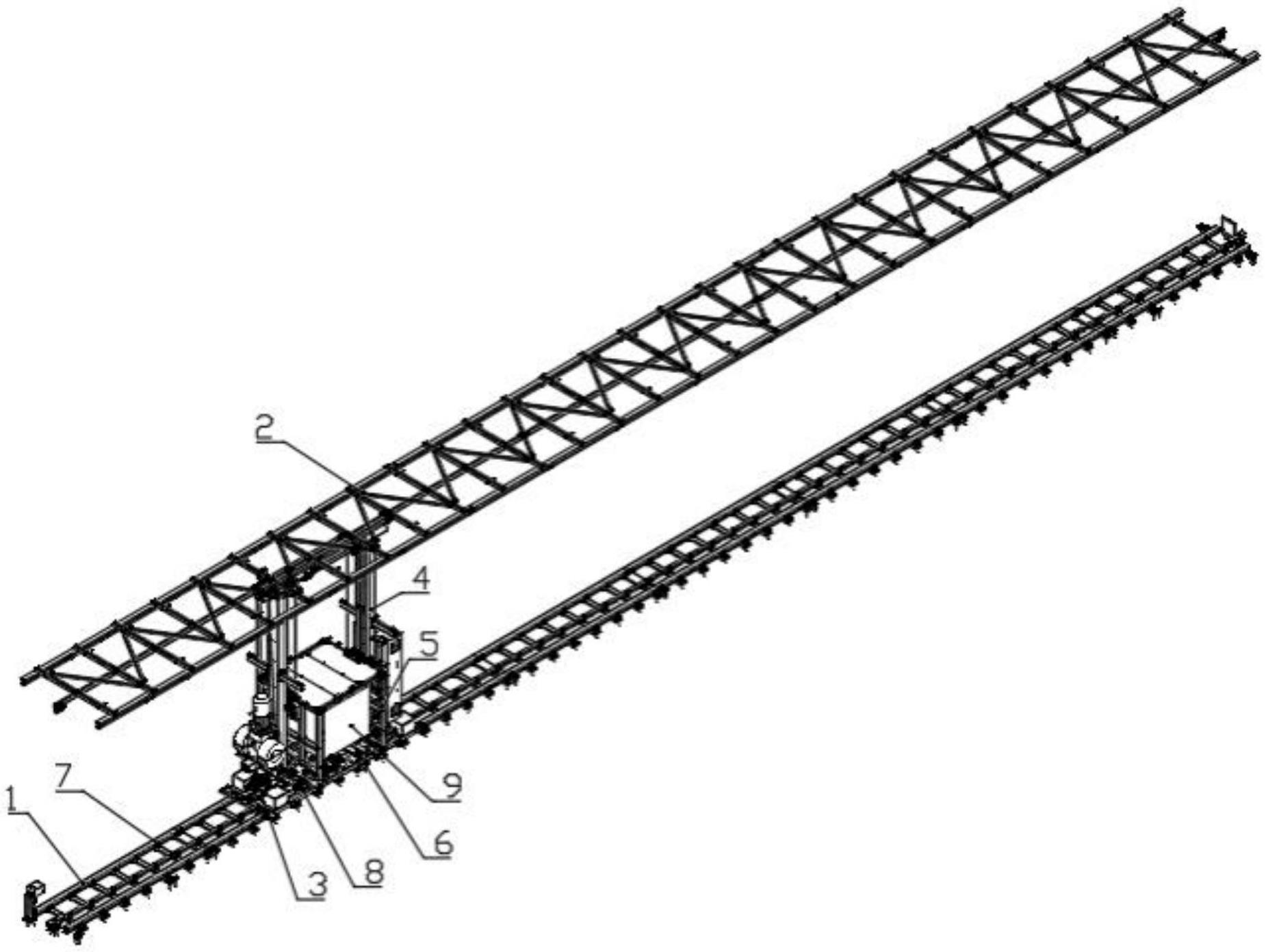
2、本实用新型提供如下技术方案:一种用于自动搬运电池装载小车的超重载堆垛机,包括双轨地轨组件、天轨组件和立柱组件,立柱组件上通过升降载货台安装有叉取货叉,立柱组件的底部设有双轨行走地车,立柱组件与天轨组件滑动配合,双轨行走地车在双轨地轨组件上滑动,双轨地轨组件上设有为双轨行走地车供电的滑触线组件,立柱组件及升降载货台设置有定位支撑组件,升降载货台设置有电池装载小车。
3、优选的,双轨地轨组件包括分列左右两侧的轨道,以及连接左右两侧轨道的小枕条组件和大枕条组件,轨道的前端设置有第一光通讯模板,轨道的后端设置有反光板组件,且轨道的前后两端均设置有缓冲器组件。
4、优选的,双轨行走地车包括行走地车底座以及安装在行走地车底座前后两端的防撞装置,行走地车底座由钢件焊接加工而成的,行走地车底座的一端顶部安装有行走地车驱动电机,行走地车底座的前后两端均安装有导向轮组,行走地车底座的一端设置有从动行走轮,另一端设置有与行走地车驱动电机输出轴连接的主动行走轮。
5、优选的,双轨行走地车上配备有升降激光测距系统、第二光通讯模板以及行走激光测距系统。
6、优选的,立柱组件包括上横梁组件以及和上横梁组件下方连接的左立柱和右立柱,左立柱和右立柱下方与行走地车底座固定安装,左立柱和右立柱顶部均安装有滑轮组,左立柱上装有升降驱动电机,升降驱动电机的输出轴上装有钢绳卷筒,钢绳卷筒通过升降钢绳与滑轮组连接,上横梁组件上安装有过载松绳调紧装置。
7、优选的,升降载货台包括框架组件、防脱绳组件及安全钳,框架组件左右侧壁分别安装水平导向轮和垂直导向轮,水平导向轮与左立柱和右立柱的两侧滚动配合,垂直导向轮与左立柱和右立柱的内侧壁滚动配合。
8、优选的,框架组件上安装有限位组件、库位检查组件和反射传感器。
9、优选的,定位支撑组件包括固定安装在左立柱和右立柱上的支撑座组件,以及框架组件两侧的防坠器组件。
10、在上述技术方案中,本实用新型提供的技术效果和优点:
11、本实用新型立柱组件上配备有定位支撑组件,由于电池装载小车重量较重,钢绳从空载到满载会有一个伸长量,从而使载货台在空载和负载时会有一个高度差,导致叉取电池装载小车不顺畅;而本实用新型的载货台通过防坠器支撑在定位支撑组件上,使载货台空载和负载时在同一基准平面,保证载货台上的货叉正常叉取电池装载小车;
12、本实用新型采用双地轨四轮承载结构,堆垛机重心比单轨更加平稳,堆垛机的重量由四个轮子承载,降低了每个行走轮的承载力,提高了堆垛机的稳定性和行走轮的使用寿命。
13、本实用新型用于自动搬运电池装载小车的超重载堆垛机的设计,将电池放入电池装载小车内,其可承载的动力电池重量大幅度提高,且稳定性和兼容性大大提高,为生产和装配电池提供了很大的便利,提高了工作效率。
技术特征:
1.一种用于自动搬运电池装载小车的超重载堆垛机,包括双轨地轨组件(1)、天轨组件(2)和立柱组件(4),其特征在于:所述立柱组件(4)上通过升降载货台(5)安装有叉取货叉(6),所述立柱组件(4)的底部设有双轨行走地车(3),所述立柱组件(4)与天轨组件(2)滑动配合,所述双轨行走地车(3)在双轨地轨组件(1)上滑动,所述双轨地轨组件(1)上设有为双轨行走地车(3)供电的滑触线组件(7),立柱组件(4)及升降载货台(5)设置有定位支撑组件(8),升降载货台(5)设置有电池装载小车(9)。
2.根据权利要求1所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述双轨地轨组件(1)包括分列左右两侧的轨道(12),以及连接左右两侧轨道(12)的小枕条组件(13)和大枕条组件(14),所述轨道(12)的前端设置有第一光通讯模板(11),所述轨道(12)的后端设置有反光板组件(16),且所述轨道(12)的前后两端均设置有缓冲器组件(15)。
3.根据权利要求2所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述双轨行走地车(3)包括行走地车底座(21)以及安装在行走地车底座(21)前后两端的防撞装置(24),所述行走地车底座(21)的一端顶部安装有行走地车驱动电机(22),所述行走地车底座(21)的前后两端均安装有导向轮组(23),所述行走地车底座(21)的一端设置有从动行走轮(25),另一端设置有与行走地车驱动电机(22)输出轴连接的主动行走轮(26)。
4.根据权利要求3所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述双轨行走地车(3)上配备有升降激光测距系统(27)、第二光通讯模板(28)以及行走激光测距系统(29)。
5.根据权利要求3所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述立柱组件(4)包括上横梁组件(31)以及和上横梁组件(31)下方连接的左立柱(34)和右立柱(33),左立柱(34)和右立柱(33)下方与行走地车底座(21)固定安装,所述左立柱(34)和右立柱(33)顶部均安装有滑轮组(39),所述左立柱(34)上装有升降驱动电机(32),所述升降驱动电机(32)的输出轴上装有钢绳卷筒(35),所述钢绳卷筒(35)通过升降钢绳(37)与滑轮组(39)连接,所述上横梁组件(31)上安装有过载松绳调紧装置(36)。
6.根据权利要求5所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述升降载货台(5)包括框架组件(51)、防脱绳组件(52)及安全钳(55),所述框架组件(51)左右侧壁分别安装水平导向轮(56)和垂直导向轮(57),所述水平导向轮(56)与左立柱(34)和右立柱(33)的两侧滚动配合,所述垂直导向轮(57)与左立柱(34)和右立柱(33)的内侧壁滚动配合。
7.根据权利要求6所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述框架组件(51)上安装有限位组件(53)、库位检查组件(58)和反射传感器(59)。
8.根据权利要求6所述的一种用于自动搬运电池装载小车的超重载堆垛机,其特征在于:所述定位支撑组件(8)包括固定安装在左立柱(34)和右立柱(33)上的支撑座组件(38),以及框架组件(51)两侧的卡位防坠组件(54)。
技术总结
本技术公开了一种用于自动搬运电池装载小车的超重载堆垛机,涉及锂电池设备生产技术领域,包括双轨地轨组件、天轨组件和立柱组件,立柱组件上通过升降载货台安装有叉取货叉,立柱组件的底部设有双轨行走地车,立柱组件与天轨组件滑动配合,双轨行走地车在双轨地轨组件上滑动,双轨地轨组件上设有为双轨行走地车供电的滑触线组件,立柱组件及升降载货台设置有定位支撑组件,升降载货台设置有电池装载小车。本技术的载货台通过防坠器支撑在定位支撑组件上,使载货台空载和负载时在同一基准平面,保证载货台上的货叉正常叉取电池装载小车,采用双地轨四轮承载结构,堆垛机重心比单轨更加平稳。
技术研发人员:黄剑波,毛南旺,陈石亮
受保护的技术使用者:湖北精实机电科技有限公司
技术研发日:20230310
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!