一种码垛机器人的稳定装置的制作方法
本技术涉及码垛机器人的稳定装置,具体是一种码垛机器人的稳定装置。
背景技术:
1、在现如今工业化的快速发展中,常常需要进行大量的产品物料搬运工作,在搬运作业时,通常会用到码垛机械,其中,最常见的便是码垛机器人,通过利用码垛机器人进行物料的堆码,并搬运到指定的位置;
2、现有的码垛机器人通常由动力装置、托板、固定装置、升降装置等结构组成,在动力装置的作用下,码垛机器人运动到物料堆放的位置,并利用固定装置将其进行固定,而后将托板插入物料的下方,并通过升降装置将物料抬起,随后撤去固定装置的作用,利用动力装置将物料运送到指定的位置;
3、但是现有的码垛机器人在作用时,时常会因为其不够稳定,而出现所搬物料质量过重导致整体结构晃动的现象,使得搬运物掉落,严重影响物料搬运作业的质量,造成了物料稳定损坏,增加了生产成本;因此,针对上述问题提出一种码垛机器人的稳定装置。
技术实现思路
1、为了弥补现有技术的不足,解决了码垛机器人的稳定方面现存的一些问题,本实用新型提出一种码垛机器人的稳定装置。
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种码垛机器人的稳定装置,包括底座台;所述底座台的底部四角位置固接有支撑体;所述支撑体的底部外侧转角位置开设有安装槽;所述底座台上安装有稳定装置;所述稳定装置包括液压缸;所述安装槽的内壁顶部安装有液压缸;所述液压缸的底部安装有伸缩杆;所述伸缩杆的底部固接有固定块;
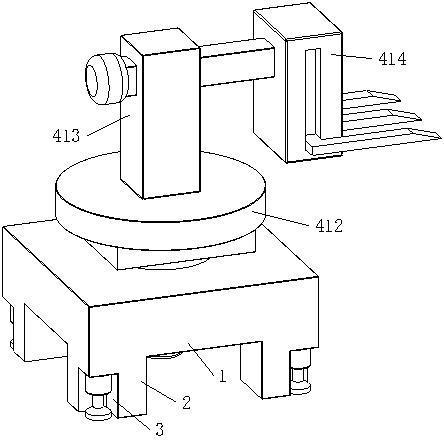
3、所述底座台的顶部中心位置开设有转动槽;所述转动槽的底部开设有转动孔;所述底座台的底部中心位置安装有马达;所述马达的输出轴的顶端固接有转动轴;所述转动轴的顶端穿过转动孔插入转动槽;所述转动轴的顶端固接有转动底板;所述转动底板的顶部固接有连接板;所述连接板的顶部安装有连接座;所述连接座的顶部安装有固定架;所述固定架上安装有码垛结构;实现了码垛机器人的稳定作用。
4、优选的,所述支撑体的底部偏心位置开设有转动腔;所述转动腔的开设位置距底座台中心点的长度,小于安装槽的开设位置距底座台中心点的长度;所述转动腔的内部通过销轴转动安装有小滚轮;实现了码垛机器人的运动效果。
5、优选的,所述固定块在未作用的状态下可完全收入安装槽;所述固定块作用时底部端面低于小滚轮的底部切面;可保证稳定装置的顺利作用。
6、优选的,所述连接板上安装有连接装置;所述连接装置包括卡孔;所述连接板的顶部开设有卡孔;所述连接板的内部开设有柱形结构腔;所述卡孔与结构腔贯通;实现了连接装置的安装。
7、优选的,所述结构腔的上下内壁中央位置安装有固定轴;所述固定轴的截面外部套设安装有转动杆;所述连接板的一侧转角位置开设有作用孔;所述作用孔与结构腔贯通;所述转动杆的一端穿过作用孔并伸出;使得转动杆能够顺利发挥作用。
8、优选的,所述连接板的底部固接有卡板;所述卡板上开设有卡槽;所述卡槽之间的开设位置呈轴对称状态;实现了对连接板的固定。
9、本实用新型的有益之处在于:
10、1.本实用新型通过稳定装置的结构设计,在小滚轮的运动下,码垛机器人运动到指定的位置,而后马达作用,转动轴带动转动底板在转动槽内转动,连接板带着连接座也随之运动,在固定架的配合下,码垛结构转动到合适的位置,随后,液压缸的作用,伸缩杆带动固定块向下运动,实现了对码垛机器人四角进行的固定,保证了码垛机器人的稳定效果,避免了由于搬运物料重量较重而发生晃动现象,也避免了掉落而造成物料的损坏。
11、2.本实用新型通过连接装置的结构设计,通过将连接板底部的卡板经由卡孔,插入结构腔,随后向转动杆施加作用力,转动杆沿作用孔转动,使得其能被卡入卡槽内部,实现了将稳定装置与码垛机器人进行连接,以便后续码垛工作的顺利进行,
技术特征:
1.一种码垛机器人的稳定装置,包括底座台(1);所述底座台(1)的底部四角位置固接有支撑体(2);所述支撑体(2)的底部外侧转角位置开设有安装槽(3);所述底座台(1)上安装有稳定装置;其特征在于:所述稳定装置包括液压缸(401);所述安装槽(3)的内壁顶部安装有液压缸(401);所述液压缸(401)的底部安装有伸缩杆(402);所述伸缩杆(402)的底部固接有固定块(403);
2.根据权利要求1所述的一种码垛机器人的稳定装置,其特征在于:所述支撑体(2)的底部偏心位置开设有转动腔(404);所述转动腔(404)的开设位置距底座台(1)中心点的长度,小于安装槽(3)的开设位置距底座台(1)中心点的长度;所述转动腔(404)的内部通过销轴转动安装有小滚轮(405)。
3.根据权利要求2所述的一种码垛机器人的稳定装置,其特征在于:所述固定块(403)在未作用的状态下可完全收入安装槽(3);所述固定块(403)作用时底部端面低于小滚轮(405)的底部切面。
4.根据权利要求3所述的一种码垛机器人的稳定装置,其特征在于:所述连接板(411)上安装有连接装置;所述连接装置包括卡孔(501);所述连接板(411)的顶部开设有卡孔(501);所述连接板(411)的内部开设有柱形结构腔(502);所述卡孔(501)与结构腔(502)贯通。
5.根据权利要求4所述的一种码垛机器人的稳定装置,其特征在于:所述结构腔(502)的上下内壁中央位置安装有固定轴(503);所述固定轴(503)的截面外部套设安装有转动杆(504);所述连接板(411)的一侧转角位置开设有作用孔(505);所述作用孔(505)与结构腔(502)贯通;所述转动杆(504)的一端穿过作用孔(505)并伸出。
6.根据权利要求5所述的一种码垛机器人的稳定装置,其特征在于:所述连接板(411)的底部固接有卡板(506);所述卡板(506)上开设有卡槽(507);所述卡槽(507)之间的开设位置呈轴对称状态。
技术总结
本技术属于码垛机器人的稳定装置技术领域,具体的说是一种码垛机器人的稳定装置,包括底座台;所述底座台上安装有稳定装置;所述液压缸的底部安装有伸缩杆;所述伸缩杆的底部固接有固定块;所述底座台的底部中心位置安装有马达;所述转动轴的顶端固接有转动底板;所述连接板的顶部安装有连接座;所述连接座的顶部安装有固定架;所述固定架上安装有码垛结构;所述连接板上安装有连接装置;所述连接板的顶部开设有卡孔;所述连接板的内部开设有柱形结构腔;所述连接板的底部固接有卡板;通过稳定装置与连接装置的共同作用,实现了对码垛机器人四角进行的固定,保证了码垛机器人的稳定效果。
技术研发人员:朱国栋,朱云
受保护的技术使用者:常州久特智能科技有限公司
技术研发日:20230315
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!