仓储机器人及仓储系统的制作方法
本申请涉及仓储物流,尤其涉及一种仓储机器人及仓储系统。
背景技术:
1、仓储机器人是指在物流仓储和生产仓库等室内环境中,用于货物出入库搬运、分拣、拣选等操作的机器人,是智能物流的核心设备之一。
2、相关技术中,仓储机器人能沿着货架纵向爬升,以搬运货架上存放于不同高度的货物,为了实现纵向爬升,仓储机器人通常具有链轮或齿轮,相应地,货架上设有与链轮或齿轮相匹配的链条或齿条,驱动链轮或齿轮转动实现仓储机器人沿纵向爬升。
3、然而,通过链轮或齿轮驱动的方式对配合精度要求较高,在仓储机器人与货架刚开始对接时,容易发生不同链轮或齿轮与对应的链条或齿条不是同时啮合的情况,导致链轮或齿轮与链条或齿条啮合时发生错位。
技术实现思路
1、本申请的目的在于提供一种仓储机器人及仓储系统,解决仓储机器人与货架爬升对接时链轮或齿轮与链条或齿条啮合容易发生错位的问题。
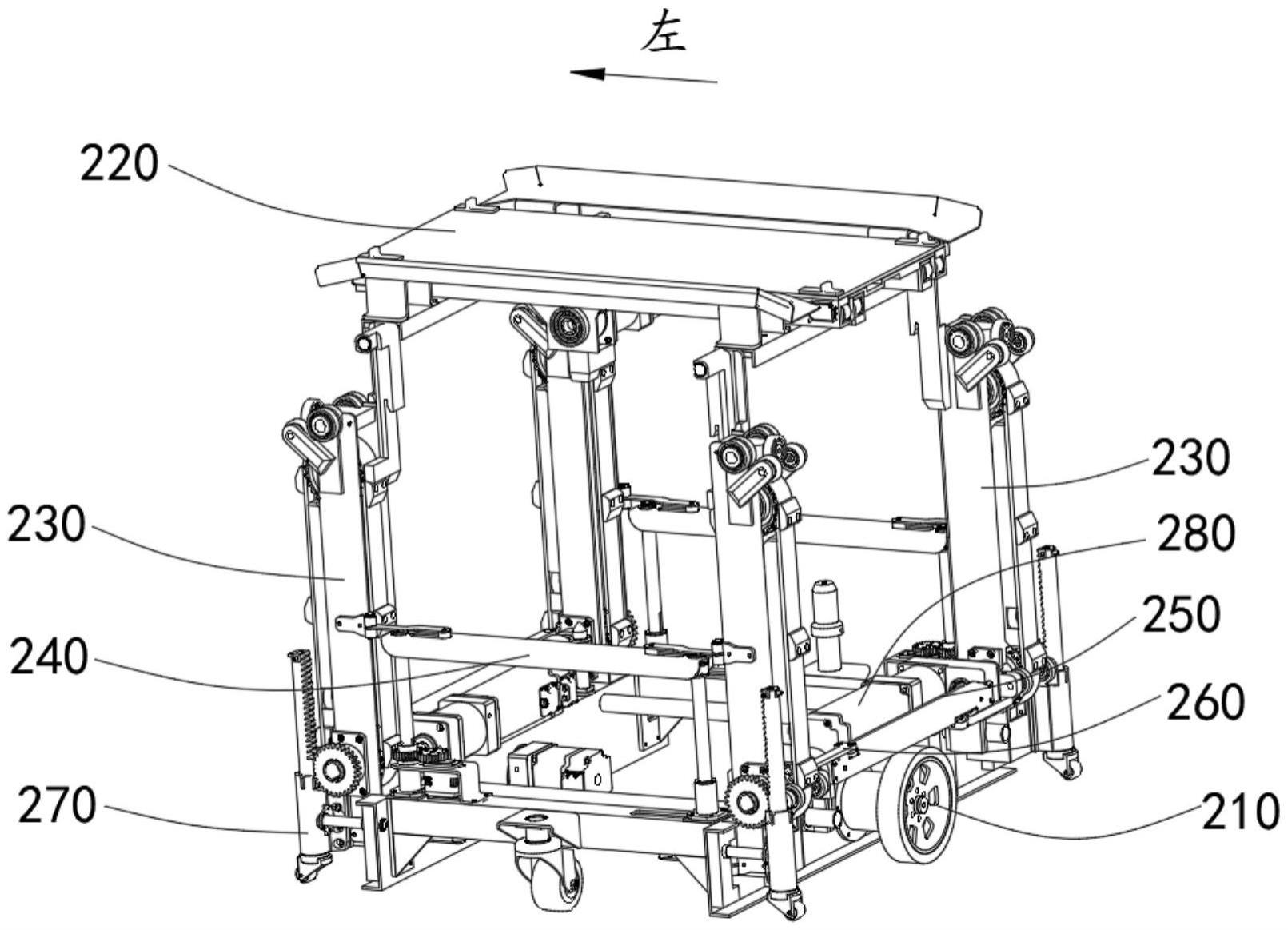
2、本申请第一方面提供一种仓储机器人,包括
3、可移动基座,用于驱动所述仓储机器人在支撑面上运动;
4、搬运装置,用于从货架单元的目标货位上获取存放对象或将存放对象放置在货架单元的目标货位上;以及
5、爬升组件,包括爬升模块和爬升驱动装置,所述爬升模块包括立架和第一同步带,所述立架设于所述可移动基座上,所述第一同步带设于所述立架上并可相对所述立架转动,所述爬升驱动装置用于驱动所述第一同步带转动,所述第一同步带上设有多个凸块,多个所述凸块沿所述第一同步带的外周间隔设置;所述凸块能够与所述货架单元抵接,以在所述第一同步带沿着所述货架单元的高度方向转动时带动所述仓储机器人升降。
6、本申请第二方面提供一种仓储系统,包括
7、多个货架单元,所述多个货架单元间隔分布,相邻货架单元之间的间隔区域形成巷道,所述货架单元包括沿所述巷道的长度方向间隔分布的多个立柱,所述立柱具有沿所述立柱高度方向排布的多个槽位;以及,
8、如上所述的仓储机器人,所述仓储机器人的多个凸块用于在第一同步带沿着所述货架单元的高度方向转动时与所述多个槽位抵接,使得所述仓储机器人沿着所述立柱升降。
9、本申请提供的技术方案可以包括以下有益效果:
10、本申请实施例的仓储机器人,爬升组件通过第一同步带上的凸块与货架单元抵接,第一同步带沿着货架单元的高度方向转动时可带动仓储机器人升降,因此无需采用链轮或齿轮对仓储机器人进行爬升驱动,而采用同步带驱动爬升的方式对精度要求较低,兼容性更好,避免了仓储机器人与货架对接时,不同链轮或齿轮不是同时啮合,从而产生高度错位的问题。
11、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种仓储机器人,其特征在于,包括:
2.根据权利要求1所述的仓储机器人,其特征在于:
3.根据权利要求2所述的仓储机器人,其特征在于:
4.根据权利要求1所述的仓储机器人,其特征在于:
5.根据权利要求4所述的仓储机器人,其特征在于:
6.根据权利要求5所述的仓储机器人,其特征在于:
7.根据权利要求5所述的仓储机器人,其特征在于:
8.根据权利要求1所述的仓储机器人,其特征在于:
9.根据权利要求8所述的仓储机器人,其特征在于:
10.根据权利要求1所述的仓储机器人,其特征在于:
11.根据权利要求10所述的仓储机器人,其特征在于:
12.根据权利要求1所述的仓储机器人,其特征在于:
13.根据权利要求12所述的仓储机器人,其特征在于:
14.根据权利要求13所述的仓储机器人,其特征在于:
15.根据权利要求13所述的仓储机器人,其特征在于:
16.根据权利要求1所述的仓储机器人,其特征在于:
17.一种仓储系统,其特征在于,包括:
18.根据权利要求17所述的仓储系统,其特征在于,
19.根据权利要求17所述的仓储系统,其特征在于,
技术总结
本申请涉及一种仓储机器人及仓储系统。该仓储机器人包括:可移动基座,用于驱动仓储机器人在支撑面上运动;搬运装置,用于从货架单元的目标货位上获取存放对象或将存放对象放置在目标货位上;以及爬升组件,包括爬升模块和爬升驱动装置,爬升模块包括立架和第一同步带,立架设于可移动基座上,第一同步带设于立架上并可相对立架转动,爬升驱动装置用于驱动第一同步带转动,第一同步带上设有多个凸块,多个凸块沿第一同步带的外周间隔设置;凸块能够与货架单元抵接,以在第一同步带沿着货架单元的高度方向转动时带动仓储机器人升降。本申请提供的方案,能够解决仓储机器人与货架爬升对接时链轮或齿轮与链条或齿条啮合容易发生错位的问题。
技术研发人员:高鹏
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:20230307
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!