用于码垛机器人上的箱袋两用抓手的制作方法
本技术属于机械手,涉及一种用于码垛机器人上的箱袋两用抓手。
背景技术:
1、自20世纪70年代末,日本将机器人技术用于码垛领域以来,码垛机器人的研究获得了迅速的发展,随着码垛机器人处理速度以及抓取重量的不断提高,能够同时处理多种物料和码垛多个料垛,得到了广大用户的青睐并迅速占领市场。而抓手机构是码垛机器人的一个核心机构,直接关系着码垛的效率。味精生产厂家生产的味精主要有食品级的小袋装和工业级的牛皮纸袋装,而食品级的味精大多数打包成箱。工厂在搬运成品味精时,一般是通过人工码垛的形式,人工码垛劳动强度大、工作效率低、存在安全隐患。
2、现有技术存在以下技术缺陷:
3、目前,用于码垛机器人的抓手大多只能满足一种类型的产品,即抓箱的抓手只能抓取箱式产品,抓袋的抓手只能抓取袋子。
技术实现思路
1、本实用新型要解决的技术问题是:克服现有技术的不足,提供一种用于码垛机器人上的箱袋两用抓手,实现一个抓手抓取两种类型的产品,满足码垛需求,降低设备成本。
2、本实用新型所述的用于码垛机器人上的箱袋两用抓手,包括横梁,横梁上固定连接有上固定板,横梁上固定连接有抓齿固定板,抓齿固定板的上表面设有抓取气缸座,抓取气缸座上铰接有抓取气缸,抓齿固定板下表面设有轴承座,轴承座内转动连接有转轴,转轴上固定连接有气缸连接件和齿臂,齿臂上固定连接有抓齿组件,气缸连接件与抓取气缸铰接,上固定板底部固定连接有箱体抓取机构。
3、工作过程或工作原理:
4、在工作时,当需要抓取袋装产品时,箱体抓取机构收缩,使其保证不与袋子干涉,抓取气缸通过收缩伸长气缸杆带动气缸连接件摆动,从而带动与之固定连接的转轴在轴承座内转动,进而通过齿臂带动抓齿组件摆动完成抓取动作,对袋装产品进行抓取码垛;在抓取箱式产品时,抓取气缸的气缸杆收缩,带动转轴旋转,使得抓齿组件处于打开状态,保证不与箱式产品干涉,然后通过箱体抓取机构下压并接触箱式产品进行抓取,实现对箱式产品的抓取和码垛。
5、所述的抓齿组件包括上抓齿固定杆和下抓齿固定杆,贯穿上抓齿固定杆和下抓齿固定杆固定连接有若干抓齿,上抓齿固定杆与齿臂固定连接。
6、所述的箱体抓取机构包括固定在横梁上的支撑梁,支撑梁上固定连接有下压气缸座,下压气缸座上固定连接有下压气缸,下压气缸上设有箱式产品吸附组件,当进行箱式产品抓取时,通过下压气缸带动箱式产品吸附组件下降接触箱式产品并进行吸附,从而实现箱式产品的抓取。
7、所述的箱式产品吸附组件包括固定在下压气缸上的若干海绵吸盘,通过海绵吸盘内嵌的真空发生器和节流阀,实现箱式产品的吸附。
8、所述的转轴与齿臂通过胀紧套相连,通过压力和摩擦力实现负载传送的一种无键联结装置,胀套在超载时,将失去联结作用,可以保护设备不受损害。
9、所述的上固定板与横梁之间连接有橡胶块,通过橡胶块垫高上固定板,防止使用过程中抓取气缸碰到上固定板。
10、与现有技术相比,本实用新型的有益效果是:
11、本实用新型满足高效率的生产能力,提高码垛速度,降低人工成本和设备成本,以减少生产操作人员以及抓手数量,实现成品味精的自动化快速码垛。
技术特征:
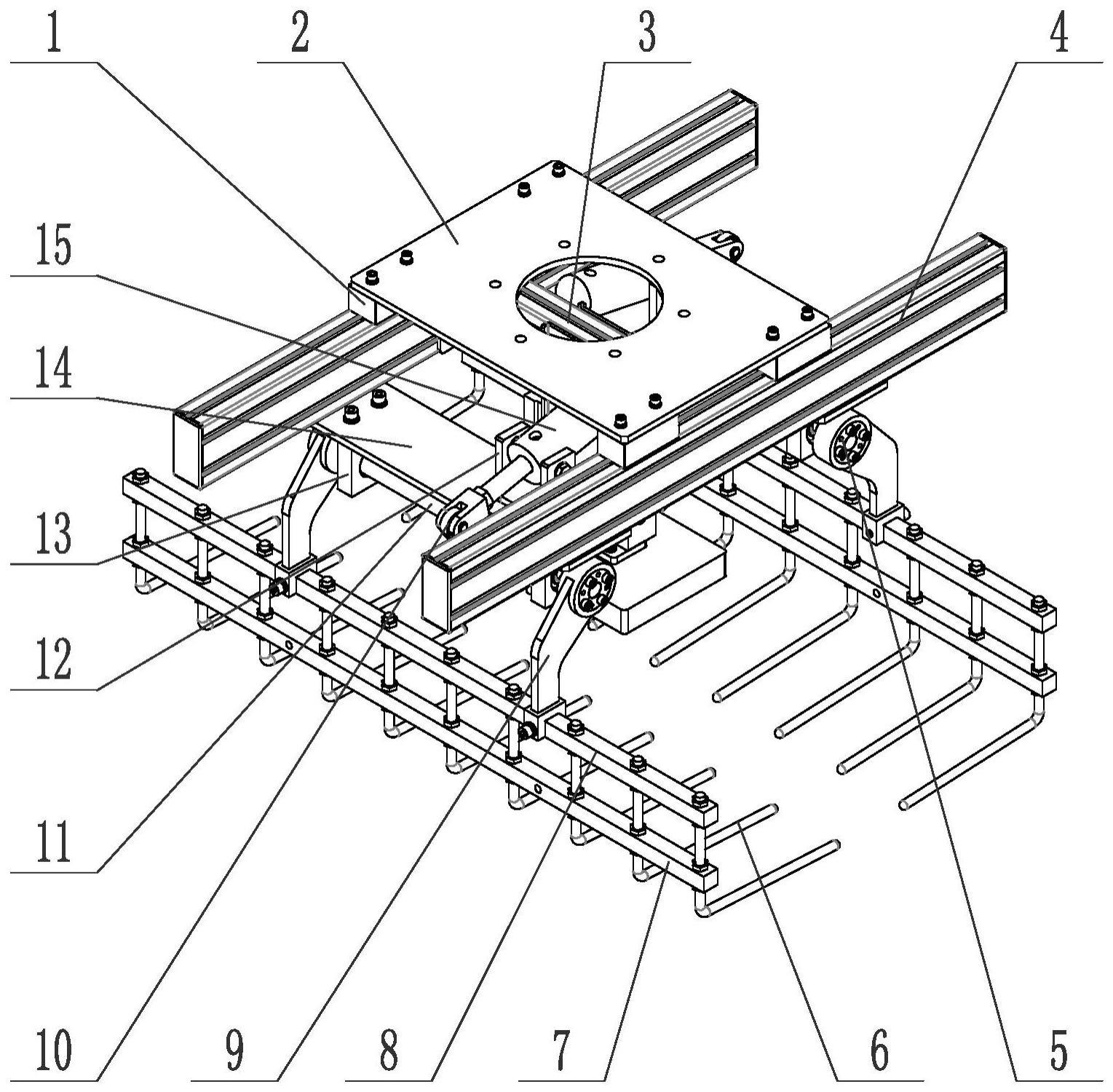
1.一种用于码垛机器人上的箱袋两用抓手,其特征在于:包括横梁(4),横梁(4)上固定连接有上固定板(2),横梁(4)上固定连接有抓齿固定板(14),抓齿固定板(14)的上表面设有抓取气缸座(12),抓取气缸座(12)上铰接有抓取气缸(15),抓齿固定板(14)下表面设有轴承座(13),轴承座(13)内转动连接有转轴(11),转轴(11)上固定连接有气缸连接件(10)和齿臂(9),齿臂(9)上固定连接有抓齿组件,气缸连接件(10)与抓取气缸(15)铰接,上固定板(2)底部固定连接有箱体抓取机构。
2.根据权利要求1所述的用于码垛机器人上的箱袋两用抓手,其特征在于:所述的抓齿组件包括上抓齿固定杆(8)和下抓齿固定杆(7),贯穿上抓齿固定杆(8)和下抓齿固定杆(7)固定连接有若干抓齿(6),上抓齿固定杆(8)与齿臂(9)固定连接。
3.根据权利要求1所述的用于码垛机器人上的箱袋两用抓手,其特征在于:所述的箱体抓取机构包括固定在横梁(4)上的支撑梁(3),支撑梁(3)上固定连接有下压气缸座(16),下压气缸座(16)上固定连接有下压气缸(17),下压气缸(17)上设有箱式产品吸附组件。
4.根据权利要求3所述的用于码垛机器人上的箱袋两用抓手,其特征在于:所述的箱式产品吸附组件包括固定在下压气缸(17)上的若干海绵吸盘(18)。
5.根据权利要求1-4任一所述的用于码垛机器人上的箱袋两用抓手,其特征在于:所述的转轴(11)与齿臂(9)通过胀紧套(5)相连。
6.根据权利要求5所述的用于码垛机器人上的箱袋两用抓手,其特征在于:所述的上固定板(2)与横梁(4)之间连接有橡胶块(1)。
技术总结
本技术属于机械手技术领域,涉及一种用于码垛机器人上的箱袋两用抓手,包括横梁,横梁上固定连接有上固定板,横梁上固定连接有抓齿固定板,抓齿固定板的上表面设有抓取气缸座,抓取气缸座上铰接有抓取气缸,抓齿固定板下表面设有轴承座,轴承座内转动连接有转轴,转轴上固定连接有气缸连接件和齿臂,齿臂上固定连接有抓齿组件,气缸连接件与抓取气缸铰接,上固定板底部固定连接有箱体抓取机构。本技术满足高效率的生产能力,提高码垛速度,降低人工成本和设备成本,以减少生产操作人员以及抓手数量,实现成品味精的自动化快速码垛。
技术研发人员:王顺敏,李继云,崔秀君,宁涔岑
受保护的技术使用者:青岛融合装备科技有限公司
技术研发日:20230320
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!