机器人底盘顶升机构的制作方法
本技术涉及机器人,具体为机器人底盘顶升机构。
背景技术:
1、机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械,在当代工业中,机器人也指能自动执行任务的人造机器装置,用以取代或协助人类工作,而目前市场上的机器人中,所采用底盘顶升机构主要包括丝杠结合直线导轨机构和连杆升降机构,其中,丝杠结合直线导轨机构要求直线导轨机构和丝杠高精度配合,组装比较麻烦,在机器人底盘悬停时,往往需要依靠直线导轨机构和丝杠摩擦力进行限位,这种方式在机器人底盘长时间悬停时,会对其结构之间造成不可逆的磨损,为此,我们提出机器人底盘顶升机构。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供机器人底盘顶升机构,确保机器人底盘能够在所需的高度进行悬停,避免电动推杆长时间处长承重负荷而导致对电动推杆造成不可逆的磨损,从而降低了机器人底盘顶升机构的故障概率,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:机器人底盘顶升机构,包括底板和顶升单元;
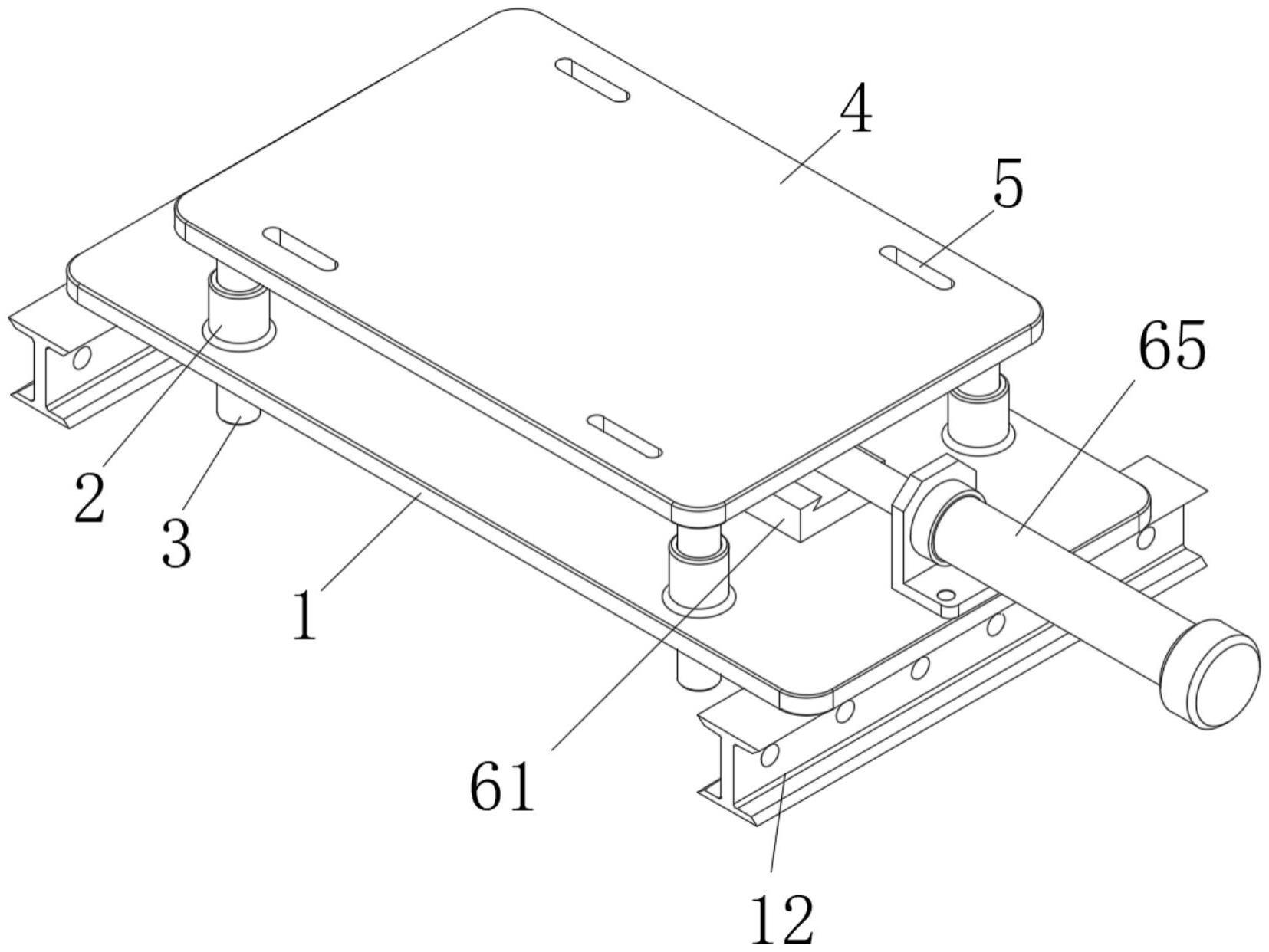
3、底板:其上表面四角对称设置的开孔内均设有固定筒,固定筒的内部均竖向滑动连接有滑动杆,滑动杆的上端均与顶板的下表面固定连接;
4、顶升单元:包括导轨板、滑动板、t型板和凸柱,所述导轨板设置于底板的上表面中部,导轨板的内部横向滑动连接有滑动板,顶板的下表面中部设有横向对称分布的t型板,t型板的前表面下端均设有凸柱,凸柱分别与滑动板上一一对应设置的斜型滑口滑动连接,确保机器人底盘能够在所需的高度进行悬停,避免电动推杆长时间处长承重负荷而导致对电动推杆造成不可逆的磨损,从而降低了机器人底盘顶升机构的故障概率。
5、进一步的,所述顶升单元还包括电动推杆,所述电动推杆通过安装座设置于底板的上表面右侧,电动推杆的伸缩端左端与滑动板的右表面固定连接,电动推杆的输入端电连接机器人内部单片机的输出端,起到高效驱动的作用。
6、进一步的,所述滑动板的前表面左侧通过转轴转动连接有棘爪,底板的上表面前端左侧设有棘齿板,棘齿板与棘爪配合设置,确保机器人底盘能够在所需的高度进行悬停。
7、进一步的,所述滑动板的前表面中部上端设有弹片,弹片的下端与棘爪的外弧面配合设置,起到自动复位的作用。
8、进一步的,所述棘爪的外弧面左侧设有拨板,滑动板的前表面左侧上端通过装配座设有推拉式电磁铁,推拉式电磁铁的推拉杆与拨板配合设置,推拉式电磁铁的输入端电连接机器人内部单片机的输出端,起到快速驱动的作用。
9、进一步的,所述底板的下表面设有横向对称设置的工字钢,对底板及其附属机构起到固定支撑的作用。
10、进一步的,所述顶板的上表面四角设有对称分布的安装口,方便工作人员进行固定。
11、与现有技术相比,本实用新型的有益效果是:本机器人底盘顶升机构,具有以下好处:
12、1、当机器人底盘需要进行顶升时,机器人内部单片机调控电动推杆运作,电动推杆伸缩端伸出顶动滑动板沿导轨板向左移动,滑动板向左移动时,凸柱会沿滑动板设置的斜型滑口带动t型板、顶板和滑动杆同步上移,以此实现对机器人底盘的顶升。
13、2、在滑动板向左移动过程中会带动棘爪同步移动,而棘齿板则会将向左移动中的棘爪不断顶起,使得棘爪克服弹片的弹力翘起,同时随着棘爪不断向左移动,棘爪又在弹片回弹力的作用不断复位与棘齿板上对应的棘齿槽不断卡接,此过程在滑动板向左移动的过程中不断重复,直至机器人底盘移动到所需的高度后,此时的棘爪则最终在弹片回弹力的作用下卡入棘齿板对应的棘齿槽内,从而确保机器人底盘能够在所需的高度进行悬停,避免电动推杆长时间处长承重负荷而导致对电动推杆造成不可逆的磨损,从而降低了机器人底盘顶升机构的故障概率。
技术特征:
1.机器人底盘顶升机构,其特征在于:包括底板(1)和顶升单元(6);
2.根据权利要求1所述的机器人底盘顶升机构,其特征在于:所述顶升单元(6)还包括电动推杆(65),所述电动推杆(65)通过安装座设置于底板(1)的上表面右侧,电动推杆(65)的伸缩端左端与滑动板(62)的右表面固定连接,电动推杆(65)的输入端电连接机器人内部单片机的输出端。
3.根据权利要求1所述的机器人底盘顶升机构,其特征在于:所述滑动板(62)的前表面左侧通过转轴转动连接有棘爪(7),底板(1)的上表面前端左侧设有棘齿板(8),棘齿板(8)与棘爪(7)配合设置。
4.根据权利要求3所述的机器人底盘顶升机构,其特征在于:所述滑动板(62)的前表面中部上端设有弹片(9),弹片(9)的下端与棘爪(7)的外弧面配合设置。
5.根据权利要求3所述的机器人底盘顶升机构,其特征在于:所述棘爪(7)的外弧面左侧设有拨板(10),滑动板(62)的前表面左侧上端通过装配座设有推拉式电磁铁(11),推拉式电磁铁(11)的推拉杆与拨板(10)配合设置,推拉式电磁铁(11)的输入端电连接机器人内部单片机的输出端。
6.根据权利要求1所述的机器人底盘顶升机构,其特征在于:所述底板(1)的下表面设有横向对称设置的工字钢(12)。
7.根据权利要求1所述的机器人底盘顶升机构,其特征在于:所述顶板(4)的上表面四角设有对称分布的安装口(5)。
技术总结
本技术公开了机器人底盘顶升机构,包括底板和顶升单元;底板:其上表面四角对称设置的开孔内均设有固定筒,固定筒的内部均竖向滑动连接有滑动杆,滑动杆的上端均与顶板的下表面固定连接;顶升单元:包括导轨板、滑动板、T型板和凸柱,所述导轨板设置于底板的上表面中部,导轨板的内部横向滑动连接有滑动板,顶板的下表面中部设有横向对称分布的T型板,T型板的前表面下端均设有凸柱,凸柱分别与滑动板上一一对应设置的斜型滑口滑动连接,该机器人底盘顶升机构,确保机器人底盘能够在所需的高度进行悬停,避免电动推杆长时间处长承重负荷而导致对电动推杆造成不可逆的磨损,从而降低了机器人底盘顶升机构的故障概率。
技术研发人员:梁午昶
受保护的技术使用者:安翼机器人(江苏)有限公司
技术研发日:20230322
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!