一种自动跟随式抓取翅片下件装置的制作方法
本技术涉及一种空调生产技术,尤其是一种翅片u形铜管焊接后从输送带上抓取下线的自动化设备,具体地说是一种自动跟随式抓取翅片下件装置。
背景技术:
1、目前,翅片铜管穿好后需要对连接相连铜管的u形弯头进行自动焊接,焊接后的翅片需要从输送带上取下,如果人工取垛则效率低下,且易产生安全事故,因此急需设计一种自动蹑随式翅片下线的自动化抓取装置,以提高空调的生产效率和质量。
技术实现思路
1、本实用新型的目的是针对现有的翅片堆垛u形接头焊接后缺少相应的自动下料机构而影响生产效率的问题,设计一种自动化程度较高的自动跟随式抓取翅片下件装置。
2、本实用新型的技术方案是:
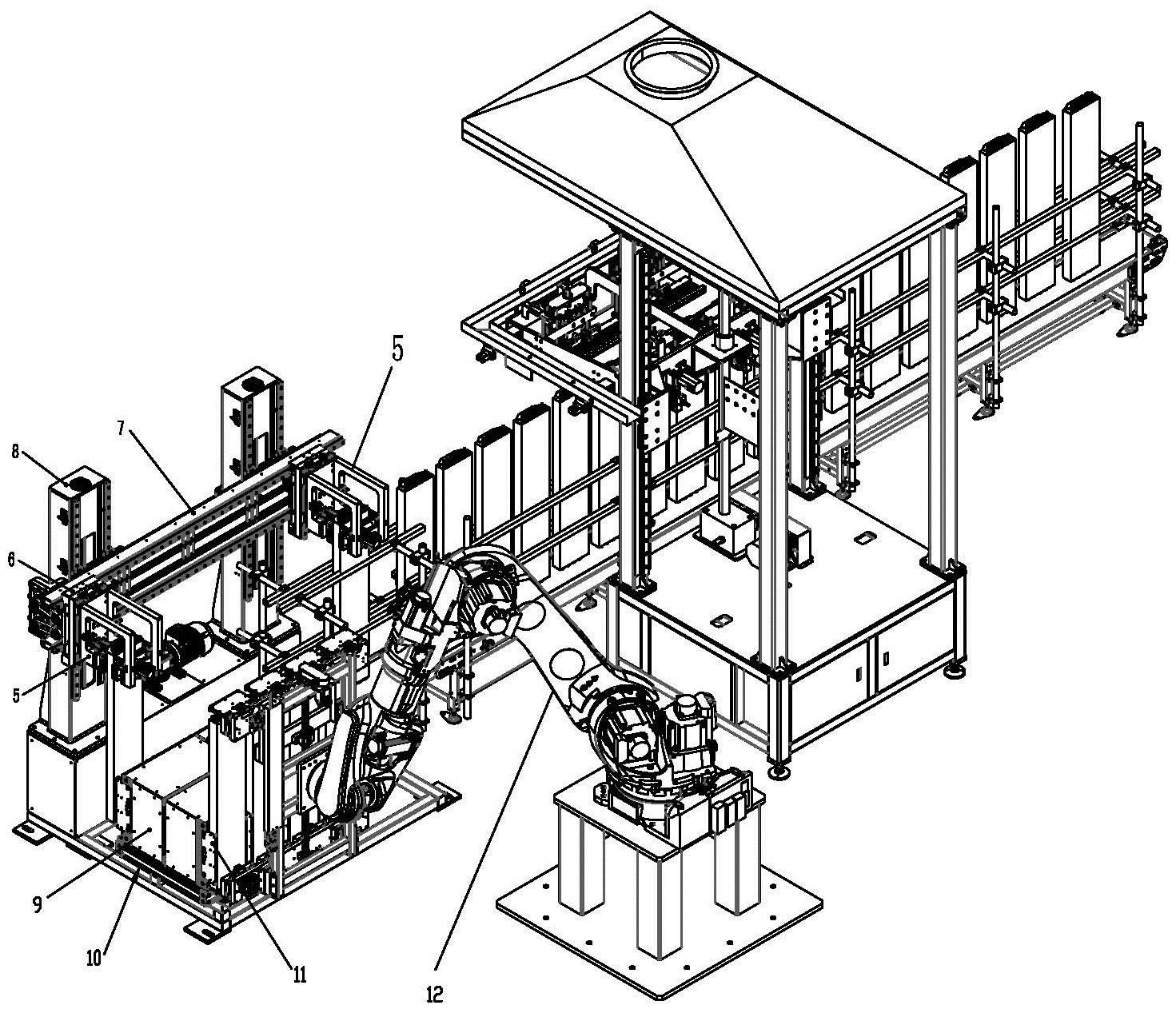
3、一种自动跟随式抓取翅片下件装置,包括翅片输送线1,翅片输送线1穿过焊接炉2并带动翅片堆垛3均速运行,其特征是:所述的翅片输送线1的出口端连接有一加速输送线4以便将翅片堆垛3之间的距离拉开,便于后道跟随抓取传感器能识别来料,进行抓取,加速输送线4上安装有线速度传感器,能测量加速输送线的即时线速度;在加速输送线一侧安装有两个抓取夹具5,每个抓取夹具5从翅片堆垛的前后两侧夹紧翅片堆垛;抓取夹具5安装在升降轨道6上,以使抓取翅片堆垛后将其提离加速输送线,升降轨道6安装在水平滑轨7上,在升降轨道6远离加速输送线的一端安装有四个旋转换向夹取模块9,所述的旋转换向夹取模块9安装在带动其作180度回转的旋转换向底座10上,所述的旋转换向夹取模块9两个一组同时从翅片堆垛的左右两侧夹取两个抓取夹具5送来的四个翅片堆垛后转向,旋转换向夹取模块9抓取翅片堆垛时两个一组同时沿旋转换向底座10伸出设定的距离,以便使翅片堆垛紧贴旋转换向夹取模块9表面,安装在每个旋转换向夹取模块9上的四个夹板11同时收拢从翅片堆垛左右两侧夹紧两个翅片堆块;在旋转换向夹取模块9的一侧安装有下件机器人12,下件机器人12从翅片堆垛上下两侧夹住翅片堆垛后,夹板11松开,下件机器人将翅片堆垛送到输送小车实现翅片堆垛的快速下件;翅片堆垛3移动到加速输送线4后,左侧的抓取夹具5同步移动将第一个翅片堆垛抓取并经升降轨道6提升离后加速输送线,升降轨道6带动抓取夹具5沿水平滑轨7快速移动至左端,此时,第二个翅片堆垛进行第二个抓取夹具5中,与第一个抓取夹具一样将第二个翅片堆垛快速移送至水平导轨的左端,此时,旋转换向夹取模块9前移设定的距离使翅片堆垛的前各地没给你旋转换向夹取模块9的表面相贴,夹板动作将两个翅片堆垛夹紧,抓取夹具松开翅片堆垛,快速返回至加速输送线准备抓取下一组翅片堆垛,与此同时,旋转换向夹取模块9作180度回转,将另一组两个旋转换向夹取模块9送至接料工位,夹有翅片堆垛的两个旋转换向夹取模块9面对下件机器人12,当下件机器人的夹爪从上下夹住翅片堆垛后,夹片松开,下件机器人将翅片堆垛送至周转车上驶离焊接现场实现下件作业。
4、所述的水平滑轨7安装在跟随抓取高度调节滑轨8上以便适应不同高度规格翅片堆垛的跟随抓取。
5、所述的夹板11由各自的气缸驱动或通过一个气缸带动四连杆机构同步松夹。
6、本实用新型的有益效果:
7、本实用新型使空调生产线的自动化程度得到提高,并实现不停机生产。整个动作,输送线不停止。整条线较为智能,输送线线速度变化,跟随抓取不用人工干预,自动匹配线速度。整体效率较高,较之前产线,效率提升30%。
技术特征:
1.一种自动跟随式抓取翅片下件装置,包括翅片输送线(1),翅片输送线(1)穿过焊接炉(2)并带动翅片堆垛(3)均速运行,其特征是:所述的翅片输送线(1)的出口端连接有一加速输送线(4)以便将翅片堆垛(3)之间的距离拉开,便于后道跟随抓取传感器能识别来料,进行抓取,加速输送线(4)上安装有线速度传感器,能测量加速输送线的即时线速度;在加速输送线一侧安装有两个抓取夹具(5),每个抓取夹具(5)从翅片堆垛的前后两侧夹紧翅片堆垛;抓取夹具(5)安装在升降轨道(6)上,以使抓取翅片堆垛后将其提离加速输送线,升降轨道(6)安装在水平滑轨(7)上,在升降轨道(6)远离加速输送线的一端安装有四个旋转换向夹取模块(9),所述的旋转换向夹取模块(9)安装在带动其作180度回转的旋转换向底座(10)上,所述的旋转换向夹取模块(9)两个一组同时从翅片堆垛的左右两侧夹取两个抓取夹具(5)送来的四个翅片堆垛,旋转换向夹取模块(9)抓取翅片堆垛时两个一组分别沿旋转换向底座(10)伸出设定的距离,以便使翅片堆垛紧贴旋转换向夹取模块(9)表面,安装在每个旋转换向夹取模块(9)上的四个夹板(11)同时收拢从翅片堆垛左右两侧夹紧四个翅片堆块;在旋转换向夹取模块(9)的一侧安装有下件机器人(12),下件机器人(12)从翅片堆垛上下两侧夹住四个翅片堆垛后,所有夹板(11)松开,下件机器人将翅片堆垛送到输送小车实现翅片堆垛的快速下件。
2.根据权利要求1所述的自动跟随式抓取翅片下件装置,其特征是:所述的水平滑轨(7)安装在跟随抓取高度调节滑轨(8)上以便适应不同高度规格翅片堆垛的跟随抓取。
3.根据权利要求1所述的自动跟随式抓取翅片下件装置,其特征是:所述的夹板(11)由各自的气缸驱动或通过一个气缸带动四连杆机构同步松夹。
技术总结
一种自动跟随式抓取翅片下件装置,包括翅片输送线(1),翅片输送线(1)穿过焊接炉(2)并带动翅片堆垛(3)均速运行,其特征是:所述的翅片输送线(1)的出口端连接有一加速输送线(4),加速输送线(4)上安装有线速度传感器;在加速输送线一侧安装有两个抓取夹具(5),每个抓取夹具(5)从翅片堆垛的前后两侧夹紧翅片堆垛;抓取夹具(5)安装在升降轨道(6)上,升降轨道(6)安装在水平滑轨(7)上,在升降轨道(6)远离加速输送线的一端安装有四个旋转换向夹取模块(9),所述的旋转换向夹取模块(9)安装在带动其作180度回转的旋转换向底座(10)上;在旋转换向夹取模块(9)的一侧安装有下件机器人(12)。本发明自动化程度高,效率高。
技术研发人员:伍文超,陈龙,杜鹏飞,徐成友
受保护的技术使用者:南京国佑智能化系统有限公司
技术研发日:20230324
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!