智能化料仓格栅清堵机的制作方法
本技术涉及清堵机,具体为能清理格栅的清堵机。
背景技术:
1、公开号为cn210303988u的中国专利公开了一种适用于冷再生骨料仓的振动格栅,包括格栅板、振动电机安装架、振动电机、弹性元件、及减速装置;通过振动电机和减速装置驱动格栅板左端绕铰接位置旋转,右端在弹性元件的作用下产生上下摆幅,而从击碎细化物料,防止其产生粘结以保证下料的顺畅;在弹性元件的作用下使得格栅板右端在产生上下摆幅后通过弹簧作用逐步向弹性元件的轴向中间位置回位;
2、上述专利的用于冷再生骨料仓的振动格栅在实际使用过程中,通过振动电机和减速装置驱动格栅板左端绕铰接位置旋转,右端在弹性元件的作用下产生上下摆幅,而从击碎细化物料,实现下料,而部分料中含水,导致会在格栅上板结成拱状,而单单通过振动无法将成拱的物料抖下;很多料仓顶部格栅是无法振动的,也无法安装振动机构,由于料仓位置要么高地面很多,要么离地面很低,格栅间间隙往往很大,一旦格栅上积料很多,往往采用人工的方式进行清理,目前国内常用人工的方式进行清理,安全隐患很大,容易造成人身伤害,因此,不满足现有的需求,对此我们提出了智能化料仓格栅清堵机。
技术实现思路
1、本实用新型的目的在于提供智能化料仓格栅清堵机,通过激光雷达扫描系统,其扫描范围覆盖全部格栅,当格栅上堆积的物料的高度超过设定值,激光雷达扫描系统给驱动机构一个操作指令,通过螺旋和毛刷实现破拱和清理,解决了上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:智能化料仓格栅清堵机,包括横跨格栅的机架以及行走驱动组件和激光雷达扫描机构,机架的底部两侧设置有沿着格栅上部侧面轨道移动的左行走轮机构以及右行走轮机构,左行走轮机构以及右行走轮机构之间的机架底部还设置有清理机构;
3、行走驱动组件和激光雷达扫描机构设置于机架的顶面上,行走驱动组件与左行走轮机构和清理机构连接。
4、优选的,所述左行走轮机构和右行走轮机构的结构相同,左行走轮机构包括行走轮、传动轴和轮架,轮架固定于机架上,轮架之间的轴承内插入传动轴,传动轴的两端安装行走轮。
5、优选的,所述清理机构为螺旋清理机构、毛刷清理机构和刮板的一种或螺旋清理机构、毛刷清理机构和刮板组合的结构;
6、其中,螺旋清理机构包括螺旋叶片、螺旋轴和螺旋架,螺旋架设置在机架上,螺旋轴的两端插入螺旋架的轴承内,螺旋叶片设置在螺旋轴上。
7、优选的,所述毛刷清理机构包括清理轴、清理架和毛刷,清理架安装在机架上,清理轴与清理架活动连接,毛刷沿径向分布在清理轴的周面上。
8、优选的,所述行走驱动组件包括移动驱动减速电机、链轮、传动链,移动驱动减速电机、螺旋减速电机和毛刷减速电机通过螺栓安装在机架上;
9、所述传动轴、螺旋轴和清理轴上设置链轮,移动驱动减速电机通过传动链连接传动轴上的链轮,螺旋减速电机通过联轴器连接螺旋轴,毛刷减速电机通过联轴器连接毛刷。
10、优选的,所述激光雷达扫描机构包括激光雷达、控制箱和旋转底座,控制箱和旋转底座设置在机架的顶部上,旋转底座上设置激光雷达,激光雷达通过导线与控制箱内的电路板连接,电路板上分布的导线分别与旋转底座和移动驱动减速电机、螺旋减速电机和毛刷减速电机连接。
11、电路板上设置有处理器、移动模块、清扫模块和旋转模块,处理器的输出端分别与激光雷达、移动模块、清扫模块和旋转模块电性连接,处理器的输入端与激光雷达相接。
12、与现有技术相比,本实用新型的有益效果是:
13、1、本实用新型通过螺旋叶片边旋转边移动实现破拱和物料位移,将格栅上堆积的物料推至格栅的孔洞中,毛刷将格栅上堆积的物料推至格栅的孔洞中,避免了格栅大量堆料的问题,毛刷同时将螺旋叶片上的物料清理干净,由于清堵机能够横跨格栅,则清堵机只需要移动一个行程即可将格栅上的物料都推下,其工作效率相较于人工清理提升幅度较大。
14、2、本实用新型通过激光发射器启动检测格栅上物料堆积的厚度,当格栅上堆积的物料的高度超过设定值,处理器发送给移动模块和清扫模块一个操作指令,驱动机构驱动整个设备进行清理工作,清理过程增加智能操作,完全实现自动和远程操控。
技术特征:
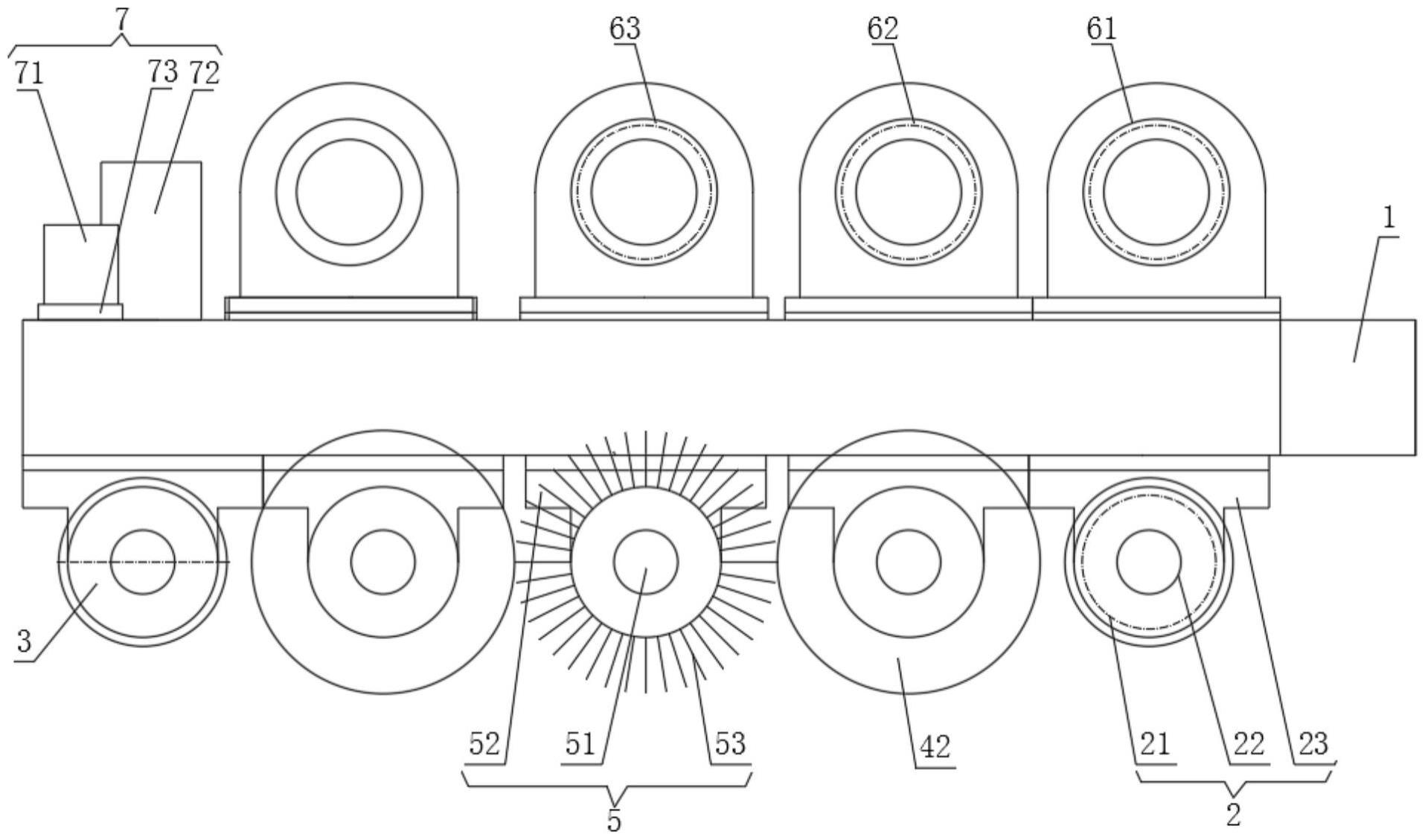
1.智能化料仓格栅清堵机,包括横跨格栅的机架(1)以及行走驱动组件(6)和激光雷达扫描机构(7),其特征在于;机架(1)的底部两侧设置有沿着格栅上部侧面轨道移动的左行走轮机构(2)以及右行走轮机构(3),左行走轮机构(2)以及右行走轮机构(3)之间的机架(1)底部还设置有清理机构(4);
2.根据权利要求1所述的智能化料仓格栅清堵机,其特征在于:所述左行走轮机构(2)和右行走轮机构(3)的结构相同,左行走轮机构(2)包括行走轮(21)、传动轴(22)和轮架(23),轮架(23)固定于机架(1)上,轮架(23)之间的轴承内插入传动轴(22),传动轴(22)的两端安装行走轮(21)。
3.根据权利要求2所述的智能化料仓格栅清堵机,其特征在于:所述清理机构(4)为螺旋清理机构、毛刷清理机构和刮板的一种或螺旋清理机构、毛刷清理机构和刮板组合的结构;
4.根据权利要求3所述的智能化料仓格栅清堵机,其特征在于:所述毛刷清理机构包括清理轴(51)、清理架(52)和毛刷(53),清理架(52)安装在机架(1)上,清理轴(51)与清理架(52)活动连接,毛刷(53)沿径向分布在清理轴(51)的周面上。
5.根据权利要求4所述的智能化料仓格栅清堵机,其特征在于:所述行走驱动组件(6)包括移动驱动减速电机(61)、链轮(64)、传动链(65),移动驱动减速电机(61)、螺旋减速电机(62)和毛刷减速电机(63)通过螺栓安装在机架(1)上;
6.根据权利要求5所述的智能化料仓格栅清堵机,其特征在于:所述激光雷达扫描机构(7)包括激光雷达(71)、控制箱(72)和旋转底座(73),控制箱(72)和旋转底座(73)设置在机架(1)的顶部上,旋转底座(73)上设置激光雷达(71),激光雷达(71)通过导线与控制箱(72)内的电路板(8)连接,电路板(8)上分布的导线分别与旋转底座(73)和移动驱动减速电机(61)、螺旋减速电机(62)和毛刷减速电机(63)连接;
技术总结
本技术公开了智能化料仓格栅清堵机,属于清堵机技术领域。本技术的智能化料仓格栅清堵机,包括横跨格栅的机架,左行走轮机构以及右行走轮机构之间的机架底部还设置有清理机构,还包括行走驱动组件和激光雷达扫描机构,激光雷达扫描机构用于检测格栅上的物料高度,高度超过设定的高度阈值后发送驱动信号至行走驱动组件,用于清堵机沿着轨道移动并启动清理机构清扫格栅上堆积的物料。现有的格栅上往往堆积物料的问题,由于很多物料中含水率较高,时间一长,容易板结成拱状,人工清理工作量大,且具有较大的危险性,而单单通过振动无法将成拱的物料抖下;因此,可以有效解决堆积物料人工清理的问题,实现机器替代人工操作。
技术研发人员:权岚
受保护的技术使用者:马鞍山市华宇环保设备制造有限公司
技术研发日:20230329
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!