饲料自动下料输送工作站的制作方法
本技术涉及饲料输送,特别涉及饲料自动下料输送工作站。
背景技术:
1、饲料存放在料桶中,相关技术中,料桶的底部用于输出饲料,料桶的下部设置有闸刀,操作工人站在料桶的一侧,通过转动闸刀以开启或关闭饲料,但是,人工操作的劳动强度。一些相关技术中,料桶采用自动控制的方式输出饲料,其中,料桶安装有控制料桶开启和关闭的装置,并且,在料桶的下方设置输送装置以输出饲料,但是,开启料桶和输出饲料分开设置,应用时需要分开控制且需配套使用,存在成本较高,通用性较差的问题。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出饲料自动下料输送工作站,所述饲料自动下料输送工作站集成自动开启料桶和输出饲料功能,降低人工劳动强度,控制和使用更为方便,通用性较好。
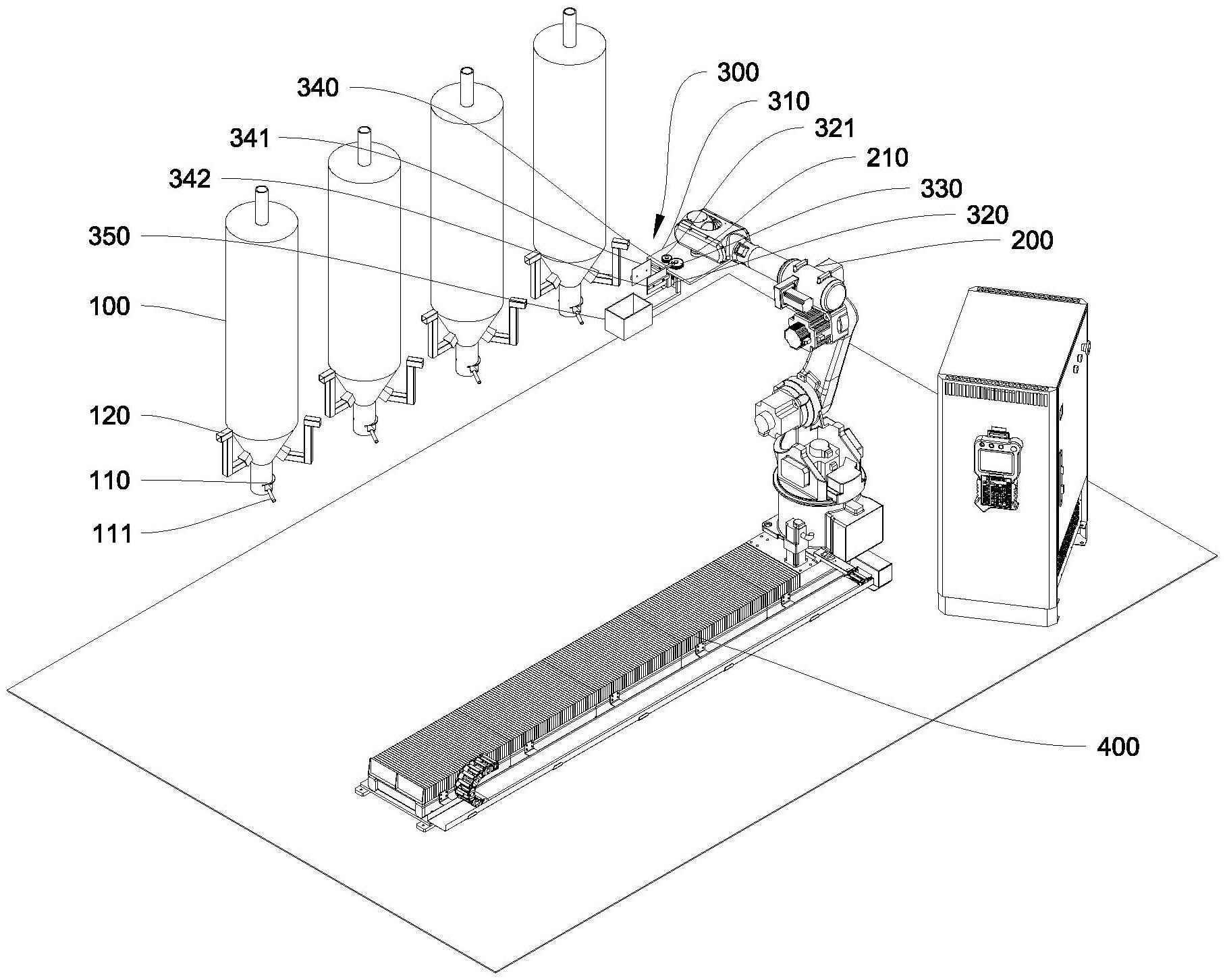
2、根据本实用新型实施例的饲料自动下料输送工作站,包括:
3、料桶,用于存放饲料,所述料桶的下部活动设置有阻挡板,所述料桶的底端设置有出料口,所述阻挡板用于阻断饲料落至所述出料口;
4、六轴机器人,设置于所述料桶的外侧,所述六轴机器人的末端设置有连接法兰;
5、取料工装,安装于所述连接法兰,所述取料工装包括承料箱和开料组件,所述开料组件用于驱使所述阻挡板运动,以使所述饲料从所述出料口落至所述承料箱。
6、根据本实用新型实施例的饲料自动下料输送工作站,至少具有如下有益效果:取料工装设置于六轴机器人的末端,集成自动开启料桶和承托饲料的功能,并且,通过六轴机器人的末端能够在空间中运动,能够将承料箱中的饲料输送至目标区域,从而,大大降低人工劳动强度,且开启料桶和输送饲料的控制和使用更为方便,成本较低,通用性较好。
7、根据本实用新型所述的饲料自动下料输送工作站,所述阻挡板转动设置于所述料桶,所述开料组件包括驱动组件和摆动架,所述驱动组件用于驱使所述摆动架摆动,以带动所述阻挡板摆动。
8、根据本实用新型所述的饲料自动下料输送工作站,所述驱动组件包括驱动电机、主动齿轮和从动齿轮,所述主动齿轮与所述驱动电机的驱动轴固定,所述主动齿轮与所述从动齿轮啮合,所述摆动架与所述从动齿轮固定连接,所述驱动电机连接并驱使所述主动齿轮转动,以带动所述摆动架摆动。
9、根据本实用新型所述的饲料自动下料输送工作站,所述阻挡板设置有开启臂,所述开启臂沿背离所述阻挡板中心的方向延伸,所述摆动架设置有第一摆动板和第二摆动板,当所述承料箱位于所述出料口的下方,所述开启臂位于所述第一摆动板和所述第二摆动板之间。
10、根据本实用新型所述的饲料自动下料输送工作站,所述第一摆动板和所述第二摆动板均为塑料制件。
11、根据本实用新型所述的饲料自动下料输送工作站,所述第一摆动板和所述第二摆动板均可拆卸设置于所述摆动架。
12、根据本实用新型所述的饲料自动下料输送工作站,所述第一摆动板和所述摆动架之间通过第一螺栓连接,所述第二摆动板和所述摆动架之间通过第二螺栓连接。
13、根据本实用新型所述的饲料自动下料输送工作站,所述取料工装包括工装板,所述工装板设置有安装法兰,所述安装法兰与所述连接法兰通过螺钉连接。
14、根据本实用新型所述的饲料自动下料输送工作站,所述料桶有多个,多个所述料桶沿线性方向间隔布置。
15、根据本实用新型所述的饲料自动下料输送工作站,所述料桶的外侧还设置有地轨,所述六轴机器人安装于所述地轨,所述地轨用于驱使所述六轴机器人沿所述地轨的长度方向运动。
16、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.饲料自动下料输送工作站,其特征在于,包括:
2.根据权利要求1所述的饲料自动下料输送工作站,其特征在于:所述阻挡板转动设置于所述料桶,所述开料组件包括驱动组件和摆动架,所述驱动组件用于驱使所述摆动架摆动,以带动所述阻挡板摆动。
3.根据权利要求2所述的饲料自动下料输送工作站,其特征在于:所述驱动组件包括驱动电机、主动齿轮和从动齿轮,所述主动齿轮与所述驱动电机的驱动轴固定,所述主动齿轮与所述从动齿轮啮合,所述摆动架与所述从动齿轮固定连接,所述驱动电机连接并驱使所述主动齿轮转动,以带动所述摆动架摆动。
4.根据权利要求3所述的饲料自动下料输送工作站,其特征在于:所述阻挡板设置有开启臂,所述开启臂沿背离所述阻挡板中心的方向延伸,所述摆动架设置有第一摆动板和第二摆动板,当所述承料箱位于所述出料口的下方,所述开启臂位于所述第一摆动板和所述第二摆动板之间。
5.根据权利要求4所述的饲料自动下料输送工作站,其特征在于:所述第一摆动板和所述第二摆动板均为塑料制件。
6.根据权利要求4或5所述的饲料自动下料输送工作站,其特征在于:所述第一摆动板和所述第二摆动板均可拆卸设置于所述摆动架。
7.根据权利要求6所述的饲料自动下料输送工作站,其特征在于:所述第一摆动板和所述摆动架之间通过第一螺栓连接,所述第二摆动板和所述摆动架之间通过第二螺栓连接。
8.根据权利要求1所述的饲料自动下料输送工作站,其特征在于:所述取料工装包括工装板,所述工装板设置有安装法兰,所述安装法兰与所述连接法兰通过螺钉连接。
9.根据权利要求1所述的饲料自动下料输送工作站,其特征在于:所述料桶有多个,多个所述料桶沿线性方向间隔布置。
10.根据权利要求1或9所述的饲料自动下料输送工作站,其特征在于:所述料桶的外侧还设置有地轨,所述六轴机器人安装于所述地轨,所述地轨用于驱使所述六轴机器人沿所述地轨的长度方向运动。
技术总结
本技术公开了饲料自动下料输送工作站,包括:料桶,用于存放饲料,料桶的下部活动设置有阻挡板,料桶的底端设置有出料口,阻挡板用于阻断饲料落至出料口;六轴机器人,设置于料桶的外侧,六轴机器人的末端设置有连接法兰;取料工装,安装于连接法兰,取料工装包括承料箱和开料组件,开料组件用于驱使阻挡板运动,以使饲料从出料口落至承料箱。取料工装设置于六轴机器人的末端,集成自动开启料桶和承托饲料的功能,并且,通过六轴机器人的末端能够在空间中运动,能够将承料箱中的饲料输送至目标区域,从而,大大降低人工劳动强度,且开启料桶和输送饲料的控制和使用更为方便,成本较低,通用性较好。
技术研发人员:叶剑,陈运棣,井亚通,张淼鑫
受保护的技术使用者:广东大广生物科技有限公司
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!