一种水下机器人的收放装置的制作方法
本技术涉及收放装置,尤其涉及一种水下机器人的收放装置。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的特种作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
2、现有技术中,水下机器人分为有线机器人和无线机器人,而无线机器人受制于无人机的续航里程,当快要断电时就需要及时充电,而现有的无线机器人的充电基本上是先将其打捞回收后再进行充电,但是探测时并不会只有一个水下机器人,并且每个水下机器人的探测区域都不一样,因此对水下机器人的回收比较麻烦,为此我们提出一种水下机器人的收放装置来解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决背景技术中涉及的现有技术存在的缺点,而提出的一种水下机器人的收放装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种水下机器人的收放装置,包括u型板和机器人本体,所述机器人本体一端设有插头,且机器人本体底部固定连接有固定板,所述u型板上设有收放结构,所述收放结构包括升降部件、充电部件和推拉部件,所述升降部件包括托举组件和两个升降组件,所述充电部件包括插座和擦拭组件,所述推拉部件包括两个推动组件和顶动组件。
4、优选的,所述u型板两侧均设有通口、竖向滑槽、横向滑槽和导向槽,所述竖向滑槽和横向滑槽相连通。
5、优选的,托举组件包括托举板,所述托举板上固定连接有与固定板相对应的回型限位板,所述托举板两侧均固定连接有与竖向滑槽和横向滑槽相对应的凸块。
6、托举组件的设置是用来对机器人本体进行安放。
7、优选的,升降组件包括与u型板固定连接的防护盒,所述防护盒内转动连接有转杆,所述防护盒一侧固定连接有电机,所述转杆一端贯穿防护盒并与电机的输出端固定连接,所述转杆上缠绕有连接绳,且连接绳的一端穿过防护盒,所述连接绳位于竖向滑槽内并与凸块固定连接。
8、升降组件的设置可以改变机器人本体的高度,并使其离开水面。
9、优选的,擦拭组件包括套设在插座外表面的套筒,所述套筒内另一端固定连接有与插头相对应的吸水棉。
10、擦拭组件可以将插头上的水擦掉,防止充电时漏电。
11、优选的,推动组件包括与u型板外侧固定连接的气缸,所述气缸的输出端固定连接有拉板,所述拉板的一端穿过通口并延伸出一部分。
12、推动组件的设置可以将机器人本体往插座处推动,从而进行充电。
13、优选的,顶动组件包括与导向槽滑动连接的推板,所述导向槽内固定连接有弹簧,且弹簧的另一端与推板固定连接。
14、顶动组件的设置可以将机器人本体往前推。
15、本实用新型至少具备以下有益效果:
16、1、一种水下机器人的收放装置,通过升降部件、充电部件和推拉部件的设置,不需要对机器人本体进行打捞回收就可以自行充电,使用起来比较方便快捷。
17、2、一种水下机器人的收放装置,通过擦拭组件的设置,可以在充电前将插头上的水擦拭干净,从而防止充电时出现漏电的情况。
技术特征:
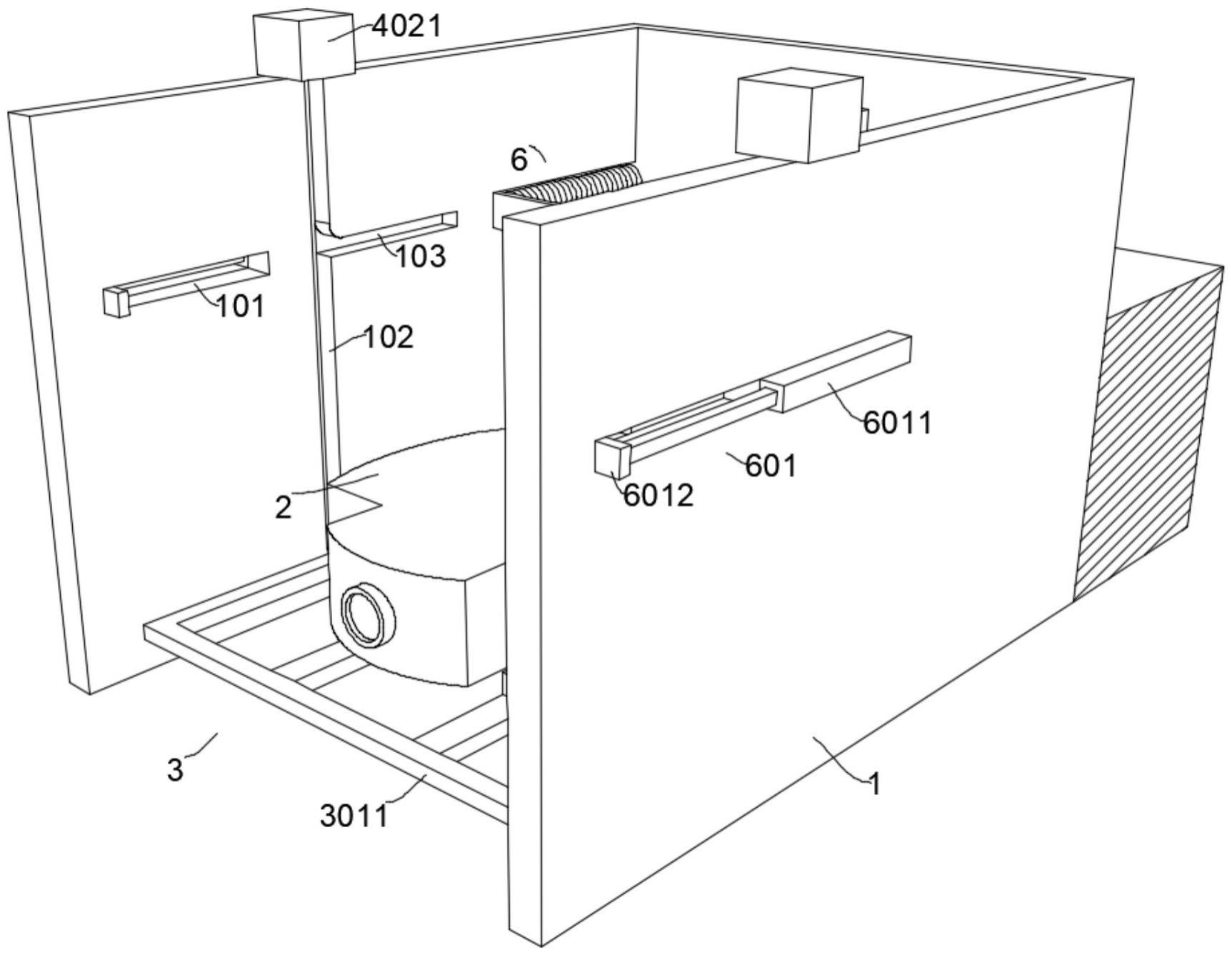
1.一种水下机器人的收放装置,包括u型板(1)和机器人本体(2),所述机器人本体(2)一端设有插头(201),且机器人本体(2)底部固定连接有固定板(202),其特征在于,所述u型板(1)上设有收放结构(3),所述收放结构(3)包括升降部件(4)、充电部件(5)和推拉部件(6),所述升降部件(4)包括托举组件(401)和两个升降组件(402),所述充电部件(5)包括插座(501)和擦拭组件(502),所述推拉部件(6)包括两个推动组件(601)和顶动组件(602)。
2.根据权利要求1所述的一种水下机器人的收放装置,其特征在于,所述u型板(1)两侧均设有通口(101)、竖向滑槽(102)、横向滑槽(103)和导向槽(104),所述竖向滑槽(102)和横向滑槽(103)相连通。
3.根据权利要求2所述的一种水下机器人的收放装置,其特征在于,托举组件(401)包括托举板(4011),所述托举板(4011)上固定连接有与固定板(202)相对应的回型限位板(4012),所述托举板(4011)两侧均固定连接有与竖向滑槽(102)和横向滑槽(103)相对应的凸块(4013)。
4.根据权利要求3所述的一种水下机器人的收放装置,其特征在于,升降组件(402)包括与u型板(1)固定连接的防护盒(4021),所述防护盒(4021)内转动连接有转杆(4022),所述防护盒(4021)一侧固定连接有电机(4023),所述转杆(4022)一端贯穿防护盒(4021)并与电机(4023)的输出端固定连接,所述转杆(4022)上缠绕有连接绳(4024),且连接绳(4024)的一端穿过防护盒(4021),所述连接绳(4024)位于竖向滑槽(102)内并与凸块(4013)固定连接。
5.根据权利要求4所述的一种水下机器人的收放装置,其特征在于,擦拭组件(502)包括套设在插座(501)外表面的套筒(5021),所述套筒(5021)内另一端固定连接有与插头(201)相对应的吸水棉(5022)。
6.根据权利要求5所述的一种水下机器人的收放装置,其特征在于,推动组件(601)包括与u型板(1)外侧固定连接的气缸(6011),所述气缸(6011)的输出端固定连接有拉板(6012),所述拉板(6012)的一端穿过通口(101)并延伸出一部分。
7.根据权利要求6所述的一种水下机器人的收放装置,其特征在于,顶动组件(602)包括与导向槽(104)滑动连接的推板(6021),所述导向槽(104)内固定连接有弹簧(6022),且弹簧(6022)的另一端与推板(6021)固定连接。
技术总结
本技术公开了一种水下机器人的收放装置,涉及收放装置技术领域,包括U型板和机器人本体,机器人本体一端设有插头,且机器人本体底部固定连接有固定板,U型板上设有收放结构,收放结构包括升降部件、充电部件和推拉部件,升降部件包括托举组件和两个升降组件,充电部件包括插座和擦拭组件,推拉部件包括两个推动组件和顶动组件,U型板两侧均设有通口、竖向滑槽、横向滑槽和导向槽,托举组件包括托举板,托举板上固定连接有与固定板相对应的回型限位板。本技术中,不需要对机器人本体进行打捞回收就可以自行充电,使用起来比较方便快捷,并且可以在充电前将插头上的水擦拭干净,从而防止出现漏电的情况。
技术研发人员:崔博涵,向键滨,张贺森,周文,王兵兵
受保护的技术使用者:重庆滨富科技有限公司
技术研发日:20230404
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!