电流互感器智能吊装系统的制作方法
本技术涉及电流互感器吊装,特别涉及电流互感器智能吊装系统。
背景技术:
1、电流互感器是依据电磁感应原理将一次侧大电流转换成二次侧小电流来测量的仪器,电流互感器是由闭合的铁芯和绕组组成,它的一次侧绕组匝数很少,串在需要测量的电流的线路中。
2、电流互感器组件(简称ct组件)是中压开关设备中非常重要的配件,而在中压开关设备生产中,由于电流互感器组件重量较大,常采用吊装的方向将其安装至中压开关设备中,而常规采用的是普通工位起重机吊装,吊装过程中常出现吊点偏心,工件会歪的现象,因此会通过人工扳动工件的方式使其垂直,不仅操作难度大,而且安全风险高,从而导致产品装配质量没保障。
技术实现思路
1、本实用新型提供电流互感器智能吊装系统,旨在解决现有的由于电流互感器组件重量较大,常采用吊装的方向将其安装至中压开关设备中,而常规采用的是普通工位起重机吊装,吊装过程中常出现吊点偏心,工件会歪的现象,因此会通过人工扳动工件的方式使其垂直,不仅操作难度大,而且安全风险高,从而导致产品装配质量没保障,从而影响安装效果的问题。
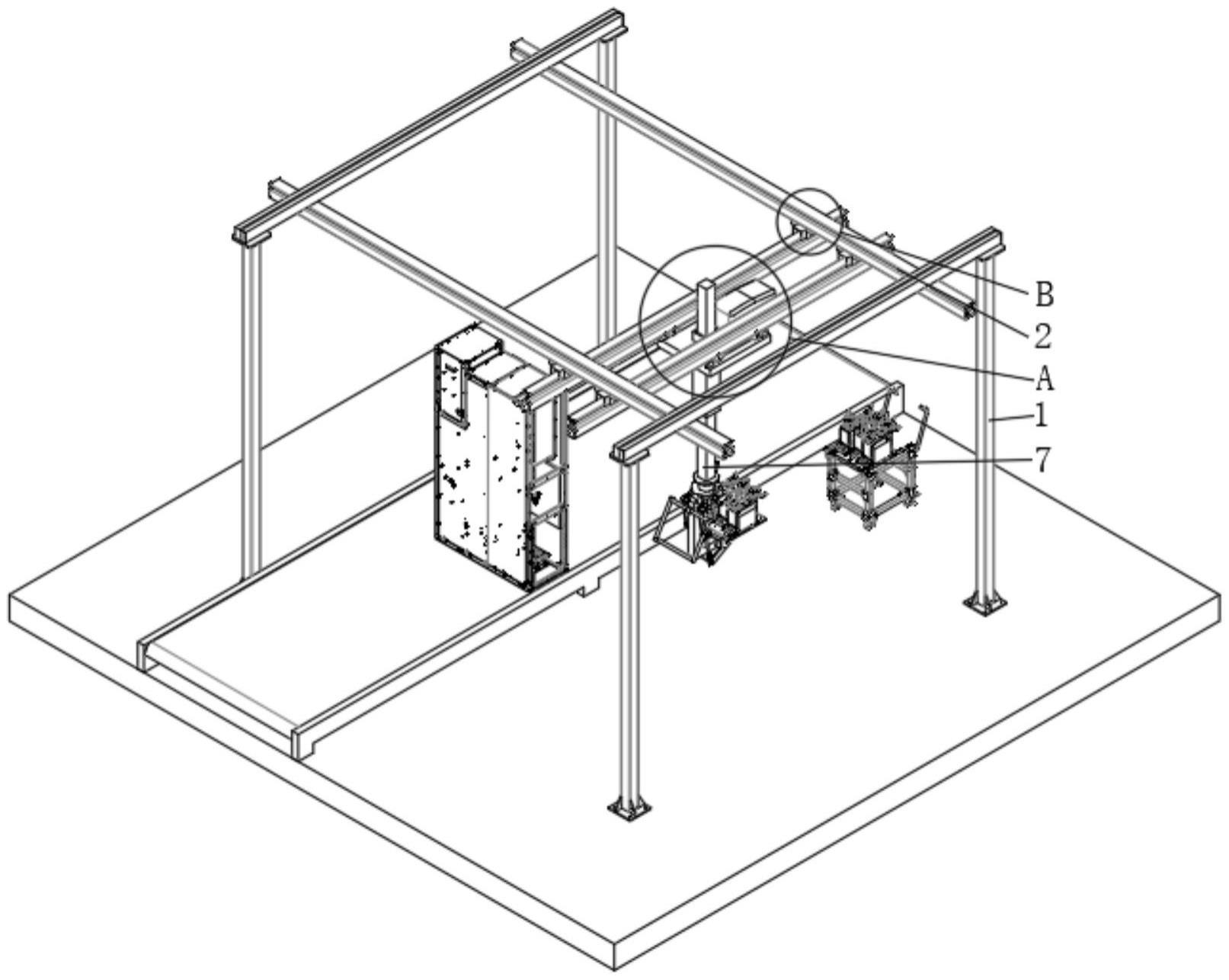
2、本实用新型是这样实现的,电流互感器智能吊装系统,包括两个钢构门架,所述钢构门架的底部栓接有两个行轨,所述行轨的底部滑动连接有主梁,所述主梁的顶部栓接有行轨小车,所述主梁的底部滑动连接有悬挂平台,所述悬挂平台的顶部设置有滑动小车,所述悬挂平台的内部滑动连接有方向滑柱,所述悬挂平台的顶部栓接有智能伺服提升机,所述方向滑柱的两侧均转动连接有翻转气缸,所述方向滑柱的两侧均转动连接有工件夹具,所述工件夹具与翻转气缸转动连接,所述工件夹具的顶部设置有ct组件,所述方向滑柱后侧的底部焊接有吊耳。
3、为了达到便于主梁移动的效果,作为本实用新型的电流互感器智能吊装系统优选的,所述主梁通过行轨小车滑动连接在行轨的底部,所述主梁的数量为两个,且等距设置在行轨的底部。
4、为了达到实现工件夹具与方向滑柱转动连接的效果,作为本实用新型的电流互感器智能吊装系统优选的,所述工件夹具靠近方向滑柱的一侧栓接有铰链结构,所述工件夹具通过铰链结构与方向滑柱转动连接。
5、为了达到便于提升方向滑柱的效果,作为本实用新型的电流互感器智能吊装系统优选的,所述方向滑柱通过吊耳与智能伺服提升机配合使用。
6、为了达到实现悬挂平台与主梁滑动连接的效果,作为本实用新型的电流互感器智能吊装系统优选的,所述滑动小车的数量为四个,且分别均匀设置在悬挂平台顶部的两侧,所述悬挂平台通过滑动小车与主梁滑动连接。
7、为了达到限制方向滑柱移动轨迹的效果,作为本实用新型的电流互感器智能吊装系统优选的,所述悬挂平台的内部焊接有滑动方向套管,所述方向滑柱滑动连接滑动方向套管的内部。
8、为了达到控制ct组件移动方位的效果,作为本实用新型的电流互感器智能吊装系统优选的,所述方向滑柱的右侧栓接有气动刹车,所述气动刹车分别与滑动小车和行轨小车配合使用。
9、与现有技术相比,本实用新型的有益效果是:
10、该电流互感器智能吊装系统,通过设置钢构门架、行轨、主梁、行轨小车、悬挂平台、滑动小车、方向滑柱、智能伺服提升机、翻转气缸、工件夹具和吊耳,可通过智能伺服提升机的起重吊钩固定在方形滑柱下方的吊孔上,通过智能伺服提升机控制方向滑柱的升降,从而可以带动工件夹具和ct组件同步升降,并通过翻转气缸和工件夹具的配合使用,使ct组件从水平状态翻转成竖直姿态,从而可以达到无需人工调整的效果,进而使ct组件的安装工作能够轻松可靠的完成吊装操作,并且智能伺服提升机能够保证升降作业可以处于浮动状态,方便对孔,达到轻松装配的效果。
技术特征:
1.电流互感器智能吊装系统,包括两个钢构门架(1),其特征在于:所述钢构门架(1)的底部栓接有两个行轨(2),所述行轨(2)的底部滑动连接有主梁(3),所述主梁(3)的顶部栓接有行轨小车(4),所述主梁(3)的底部滑动连接有悬挂平台(5),所述悬挂平台(5)的顶部设置有滑动小车(6),所述悬挂平台(5)的内部滑动连接有方向滑柱(7),所述悬挂平台(5)的顶部栓接有智能伺服提升机(8),所述方向滑柱(7)的两侧均转动连接有翻转气缸(9),所述方向滑柱(7)的两侧均转动连接有工件夹具(10),所述工件夹具(10)与翻转气缸(9)转动连接,所述工件夹具(10)的顶部设置有ct组件(12),所述方向滑柱(7)后侧的底部焊接有吊耳(11)。
2.根据权利要求1所述的电流互感器智能吊装系统,其特征在于:所述主梁(3)通过行轨小车(4)滑动连接在行轨(2)的底部,所述主梁(3)的数量为两个,且等距设置在行轨(2)的底部。
3.根据权利要求1所述的电流互感器智能吊装系统,其特征在于:所述工件夹具(10)靠近方向滑柱(7)的一侧栓接有铰链结构(13),所述工件夹具(10)通过铰链结构(13)与方向滑柱(7)转动连接。
4.根据权利要求1所述的电流互感器智能吊装系统,其特征在于:所述方向滑柱(7)通过吊耳(11)与智能伺服提升机(8)配合使用。
5.根据权利要求1所述的电流互感器智能吊装系统,其特征在于:所述滑动小车(6)的数量为四个,且分别均匀设置在悬挂平台(5)顶部的两侧,所述悬挂平台(5)通过滑动小车(6)与主梁(3)滑动连接。
6.根据权利要求1所述的电流互感器智能吊装系统,其特征在于:所述悬挂平台(5)的内部焊接有滑动方向套管(14),所述方向滑柱(7)滑动连接滑动方向套管(14)的内部。
7.根据权利要求1所述的电流互感器智能吊装系统,其特征在于:所述方向滑柱(7)的右侧栓接有气动刹车(15),所述气动刹车(15)分别与滑动小车(6)和行轨小车(4)配合使用。
技术总结
本技术公开了电流互感器智能吊装系统,属于电流互感器吊装技术领域,其技术方案要点包括两个钢构门架,所述钢构门架的底部栓接有两个行轨,所述行轨的底部滑动连接有主梁,所述主梁的顶部栓接有行轨小车,所述主梁的底部滑动连接有悬挂平台,所述悬挂平台的顶部设置有滑动小车,所述悬挂平台的内部滑动连接有方向滑柱,解决了现有的由于电流互感器组件重量较大,常采用吊装的方向将其安装至中压开关设备中,而常规采用的是普通工位起重机吊装,吊装过程中常出现吊点偏心,工件会歪的现象,因此会通过人工扳动工件的方式使其垂直,不仅操作难度大,而且安全风险高,从而导致产品装配质量没保障,从而影响安装效果的问题。
技术研发人员:张宜利,罗庆烺,刘诗炜,徐进森
受保护的技术使用者:凯易捷(厦门)自动化设备有限公司
技术研发日:20230406
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!