一种全自动物流打包机器人的制作方法
本技术涉及全自动物流打包机器人,具体为一种全自动物流打包机器人。
背景技术:
1、全自动物流打包机器人是物流打包工作中必不可少的装置之一,工作人员控制全自动物流打包机器人对物流包装箱进行打包工作,有鉴于此,传统的装置不够完善,没有方便对胶带进行固定的设施,比较麻烦,而一种全自动物流打包机器人能够方便工作人员快速对胶带进行安装固定。
2、现有技术中全自动物流打包机器人存在的缺陷是:
3、1、专利文件:cn212099500u一种全自动打包用物流机器人,“包括外壳一,其特征在于:所述外壳一的内部固定安装有蓄电池,所述外壳一的内壁固定安装有打包机,所述外壳一的外部一侧固定安装有机械臂,所述外壳一的外部安装机械臂的一侧固定安装有遥感装置,所述外壳一的底部活动安装有车轴,所述外壳一的内部底部固定安装有第二电机,所述外壳一的内壁固定安装第一电机,该全自动打包用物流机器人,在工作时转轴带动进货传送带移动,进货传送带内部安装有多个气囊,对物品加大稳定防止放置时损坏,当物品打包好掉落时,第一气垫和弹簧对物品进行缓冲保护,避免物品在跌落时损坏,提高物品在移动当中的安全性”。上述公开文献的一种全自动打包用物流机器人主要考虑对物品进行缓冲保护,避免物品在跌落时损坏,提高物品在移动当中的安全性的问题。
4、现有的全自动物流打包机器人通常在对胶带安装后,胶带在对纸箱进行打包工作时会出现松动移动的现象,不便于对胶带进行固定,影响胶带的打包工作。
技术实现思路
1、本实用新型的目的在于提供一种全自动物流打包机器人,能够解决现有技术中不便于对连胶带进行固定的技术问题。
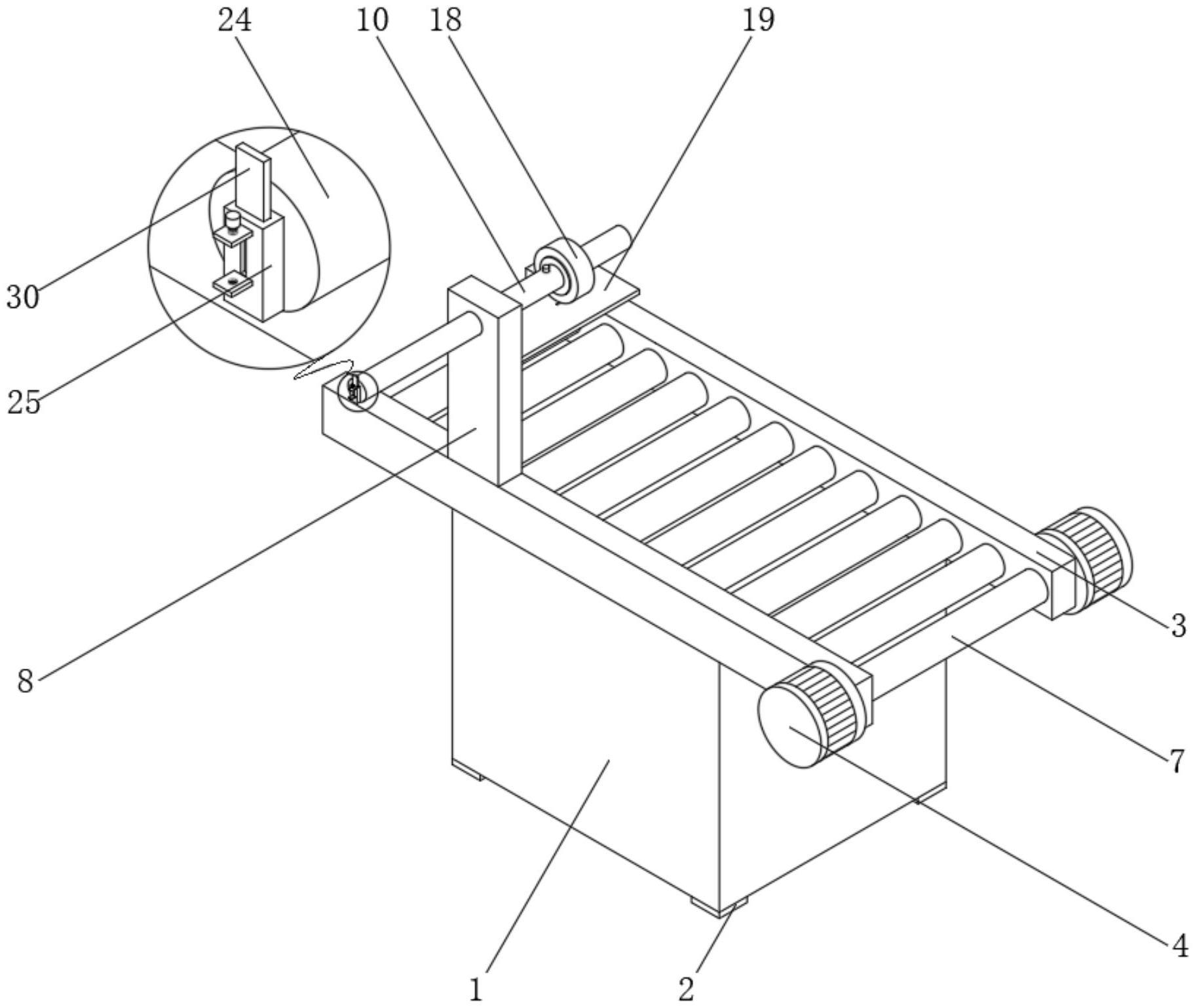
2、为实现上述目的,本实用新型提供如下技术方案:一种全自动物流打包机器人,包括底座,所述底座的顶部安装有支撑板;
3、所述支撑板的内侧安装有转块,所述转块的的一侧安装有转棒,所述转棒的内侧开设有凹槽,所述凹槽的内侧安装有短弹簧,所述短弹簧的顶部安装有连接板,所述连接板的顶部安装有按钮,且按钮贯穿转棒的顶部,所述连接板的顶部安装有挡板,且挡板贯穿转棒的顶部。
4、优选的,所述底座的底部安装有四个垫块。
5、优选的,所述底座的顶部安装有两个长壳,长壳的一侧安装有电机,且电机的输出端贯穿长壳的一侧,电机的输出端的外侧安装有轴承,且轴承镶嵌安装于长壳的一侧,电机的输出端的一侧安装有链轮,且链轮位于长壳的内侧,链轮的外侧啮合安装有链条,且链条的内侧啮合安装有一组链轮,链轮之间安装有滚筒,且滚筒的两侧安装有另一种轴承,且另一种轴承镶嵌安装于长壳的另一侧。
6、优选的,所述转棒的外侧安装有圆片。
7、优选的,所述转棒的外侧安装有圆壳,且圆壳位于圆片的一侧,圆壳的外侧安装有胶带。
8、优选的,所述支撑板的一侧安装有底板,且底板位于转棒的底部,底板的底部安装有电动伸缩杆,电动伸缩杆的伸缩端的底部安装有滚轮,底板的底部安装有伸缩气缸,且伸缩气缸位于电动伸缩杆的一侧,伸缩气缸的伸缩端的底部安装有切刀。
9、优选的,所述支撑板的另一侧安装有固定杆,固定杆的一侧安装有外壳,外壳的一侧开设有短槽,外壳的底壁内侧安装有固定块,固定块的顶部安装有长弹簧,长弹簧的顶部安装有阻块,阻块的顶部安装有移动板,且移动板贯穿外壳的顶部,阻块的一侧安装有螺纹块,且螺纹块贯穿短槽的内部,螺纹块的内部贯穿螺纹安装有固定栓,外壳的一侧安装有方板,且方板位于螺纹块的底部。
10、与现有技术相比,本实用新型的有益效果如下:
11、1、本实用新型通过安装有按钮,工作人员向下按动按钮,使按钮在外力的作用下能够带动连接板向下进行移动,使按钮能够移进凹槽的内侧,连接板在外力的作用下能够带动挡板向下进行移动,使挡板能够移进凹槽的内侧,工作人员通过圆壳将胶带套在转棒的外侧,将胶带移动到圆片的一侧与圆片相接触,工作人员松开按钮,使短弹簧在没有外力的作用下利用自身弹力带动连接板向上进行移动,使连接板能够带动按钮和挡板向上进行移动,使挡板移出凹槽的内侧对圆壳进行阻挡,使挡板能够与圆片相互配合对胶带进行限位固定,工作人员在使用全自动物流打包机器人时,该装置能够方便工作人员对胶带进行安装固定,从而能够使胶带能够正常进行打包工作。
12、2、本实用新型通过安装有螺纹块,工作人员向下按动螺纹块,使螺纹块在外力的作用下能够带动阻块向下进行移动,使螺纹块能够沿着短槽内侧进行移动,使阻块能够带动移动板一同向下进行移动,工作人员将螺纹块移动到靠近方板时,工作人员拧动固定栓,使固定栓在螺纹块的螺纹支撑下向下进行移动,使固定栓在方板的螺纹支撑下能够移进方板的内侧,使固定栓能够通过螺纹块和方板对阻块进行固定,使阻块能够支撑移动板进行固定,使移动板不再对固定杆上的胶带进行阻挡,工作人员能够将事先放置在固定杆上的胶带取下,工作人员在使用全自动物流打包机器人时,该装置能够对多卷胶带进行放置,从而能够方便工作人员对胶带进行使用。
技术特征:
1.一种全自动物流打包机器人,包括底座(1),其特征在于:所述底座(1)的顶部安装有支撑板(8);
2.根据权利要求1所述的一种全自动物流打包机器人,其特征在于:所述底座(1)的底部安装有四个垫块(2)。
3.根据权利要求2所述的一种全自动物流打包机器人,其特征在于:所述底座(1)的顶部安装有两个长壳(3),长壳(3)的一侧安装有电机(4),且电机(4)的输出端贯穿长壳(3)的一侧,电机(4)的输出端的外侧安装有轴承,且轴承镶嵌安装于长壳(3)的一侧,电机(4)的输出端的一侧安装有链轮(5),且链轮(5)位于长壳(3)的内侧,链轮(5)的外侧啮合安装有链条(6),且链条(6)的内侧啮合安装有一组链轮(5),链轮(5)之间安装有滚筒(7),且滚筒(7)的两侧安装有另一种轴承,且另一种轴承镶嵌安装于长壳(3)的另一侧。
4.根据权利要求1所述的一种全自动物流打包机器人,其特征在于:所述转棒(10)的外侧安装有圆片(16)。
5.根据权利要求4所述的一种全自动物流打包机器人,其特征在于:所述转棒(10)的外侧安装有圆壳(17),且圆壳(17)位于圆片(16)的一侧,圆壳(17)的外侧安装有胶带(18)。
6.根据权利要求1所述的一种全自动物流打包机器人,其特征在于:所述支撑板(8)的一侧安装有底板(19),且底板(19)位于转棒(10)的底部,底板(19)的底部安装有电动伸缩杆(20),电动伸缩杆(20)的伸缩端的底部安装有滚轮(21),底板(19)的底部安装有伸缩气缸(22),且伸缩气缸(22)位于电动伸缩杆(20)的一侧,伸缩气缸(22)的伸缩端的底部安装有切刀(23)。
7.根据权利要求6所述的一种全自动物流打包机器人,其特征在于:所述支撑板(8)的另一侧安装有固定杆(24),固定杆(24)的一侧安装有外壳(25),外壳(25)的一侧开设有短槽(26),外壳(25)的底壁内侧安装有固定块(27),固定块(27)的顶部安装有长弹簧(28),长弹簧(28)的顶部安装有阻块(29),阻块(29)的顶部安装有移动板(30),且移动板(30)贯穿外壳(25)的顶部,阻块(29)的一侧安装有螺纹块(31),且螺纹块(31)贯穿短槽(26)的内部,螺纹块(31)的内部贯穿螺纹安装有固定栓(32),外壳(25)的一侧安装有方板(33),且方板(33)位于螺纹块(31)的底部。
技术总结
本技术公开了一种全自动物流打包机器人,包括底座,所述底座的顶部安装有支撑板,本技术通过安装有按钮,工作人员向下按动按钮,使按钮在外力的作用下能够带动连接板向下进行移动,使按钮能够移进凹槽的内侧,连接板在外力的作用下能够带动挡板向下进行移动,使挡板能够移进凹槽的内侧,工作人员通过圆壳将胶带套在转棒的外侧,将胶带移动到圆片的一侧与圆片相接触,工作人员松开按钮,使短弹簧在没有外力的作用下利用自身弹力带动连接板向上进行移动,使连接板能够带动按钮和挡板向上进行移动,使挡板移出凹槽的内侧对圆壳进行阻挡,使挡板能够与圆片相互配合对胶带进行限位固定。
技术研发人员:孙维维
受保护的技术使用者:重庆市梁平区乐程乐码科技培训有限公司
技术研发日:20230406
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!