一种基于视觉目标识别系统的AGV机器人的制作方法
本技术涉及机器人视觉,具体涉及一种基于视觉目标识别系统的agv机器人。
背景技术:
1、随着经济迅速发展,壮大物流产业及其配套设备的智能化系统的应用,在搬运货物是物流运营环节中不可缺失的部分,agv机器人则在物流仓储搬运货物中起到了至关重要的作用,具有工作效率高、可靠安全性高、取代人功劳力成本及自动化程度高的特点。
2、现有的agv机器人采用了视觉导引技术,通过扫描、拍摄货物标识等手段自动识别目标并精确搬运货物,例如,申请号为cn201721880723.0公开了一种基于视觉的agv机器人中,包括有图像采集器、可旋转连接件、电机、支撑柱、车载装置、led灯、环形led灯阵列及图像采集装置组成,通过支撑柱内的电机控制可旋转连接件带动旋转图像采集器进行多角度采集图像,利用led灯改善光照条件,以此采集图像信息进行融合处理,用于扩大识别范围,但是存在视觉设置位置固定化、不能随搬运料箱自动调节视觉,以及agv搬运时视觉识别存在盲区缺陷;申请号为cn202221424286.2公开了一种agv物流车用视觉识别装置中,包括gv车体、驱动机构、微型转动电机、固定架、输送带、内凹轮、检测机构、安装架、灰度传感器、蓝牙模块、导轮、视觉识别机构、安置架、光敏传感器、视觉摄像头、照明灯、支撑组件、承载板及突出导轨组成,通过视觉识别机构对agv车体的行进路线进行探照,和驱动机构带动检测机构以agv车体外侧进行绕周转动,用于对agv车体的行进环境进行全方位识别和检测,但依旧存在视觉识别范围集中车体运行的底端,出现局限化和高层货物视觉误差的缺陷。
3、因此,上述两个专利中均公开了agv机器人,在融入视觉算法的系统技术时,存在视觉识别目标物体装置在agv机器人上不可调节的问题,以及识别盲区和目标锁定角度误差的问题。
技术实现思路
1、本实用新型的目的在于提供一种基于视觉目标识别系统的agv机器人,以解决上述背景技术中提到的技术问题。
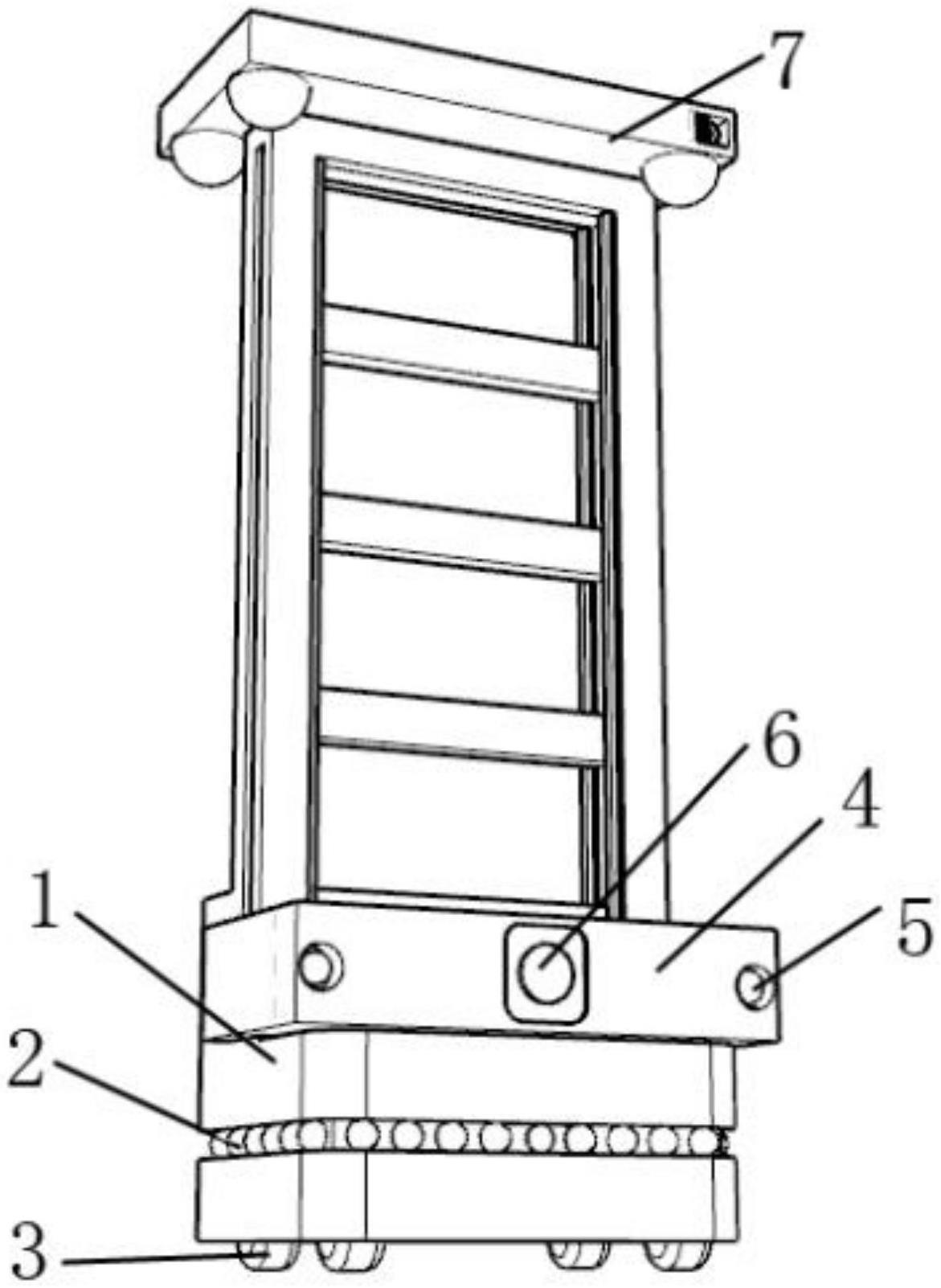
2、为了实现上述目的,本实用新型公开了一种基于视觉目标识别系统的agv机器人,包括agv机器人,所述agv机器人底端的中部设置有激光传感器,所述agv机器人下表面的四周均活动连接有驱动万向轮,位于所述agv机器人靠近正面的上表面中部且位于所述agv机器人靠近背面立杆的外侧设置有伸缩搬运台,所述伸缩搬运台正面的两端均设置有视觉传感器,用于视觉扫描目标货物标签和采集图像数据,所述伸缩搬运台正面的中部设置有雷达探测器,利用电磁波探测目标货物的距离,所述agv机器人的顶端活动套接有无影射灯组件,用于照明提供光亮。
3、可选地,所述无影射灯组件的结构包括有灯架,所述灯架下表面的中部开设有滑槽,用于与agv机器人的顶端可拆卸式连接,所述灯架下表面的四周均设置有球形射灯,用于照明进行夜间工作,所述灯架正面的一侧开设有充电槽,位于所述灯架正面的一侧且位于所述充电槽的内部固定连接有充电接口,用于充电续存电能给球形射灯提供放电的能量,所述灯架的内部活动连接有挡板。
4、可选地,所述伸缩搬运台的结构包括有搬运架,所述搬运架的侧面设置有数据处理芯片,用于接收视觉传感器和雷达探测器采集的信号进行数据处理,并利用端口协议连接传输到(03)中显示数据,所述搬运架靠近背面的内部开设有伸缩轨道。
5、可选地,所述agv机器人的结构包括有升降车体,所述升降车体背面的一侧设置有开关,所述升降车体背面的另一侧设置有智能显示屏,位于所述升降车体背面的一侧且位于所述开关的下方开设有散热孔,所述升降车体背面底端的中部活动连接有挡门,所述升降车体背面底端的中部开设有插座槽,位于所述升降车体面底端的中部且位于所述插座槽的内部固定连接有插座接口。
6、可选地,所述滑槽的形状与所述升降车体顶端的形状相同,用于滑动套接相连,所述挡板的宽度与所述充电槽的宽度相等,所述挡板的长度比所述充电槽的长度要小,用于在充电槽的内部伸缩,打开和遮盖住充电接口。
7、可选地,所述挡门的长度和宽度分别与所述插座槽的长度和宽度相等,用于遮挡住插座接口进行防尘遮水,所述电动升降管底端的直径等于所述升降车体宽度的一半,用于占大面积支撑搬运架,降低搬运货物的重心,提高稳定性,所述数据处理芯片与所述视觉传感器和雷达探测器相连,用于接受传感器采集的数据信号进行数字化处理和传输,所述伸缩轨道的形状与升降车体内部伸缩台槽的形状相互匹配。
8、与现有技术相比,本实用新型具有以下优点:
9、1、该基于视觉目标识别系统的agv机器人中,通过在升降车体上设置有电动升降管,以及在升降车体上端安装可拆卸无影射灯组件的结构,通过无影射灯组件实现了无影照明,避免夜间工作的视觉盲区功能,达到了无影射灯组件能照明agv机器人四周,避免视觉盲区和降低夜间视觉误差的效果。
10、2、该基于视觉目标识别系统的agv机器人中,通过在搬运架上设置有视觉传感器和雷达探测器的结构,实现了在agv机器人上可智能自动化搬运高层货物,可移动的视觉系统随着升降台智能识别目标物体的功能,达到了视觉传感器和雷达探测器随着伸缩搬运台升降调节识别目标的灵活效果。
技术特征:
1.一种基于视觉目标识别系统的agv机器人,其特征在于:包括agv机器人(1),所述agv机器人(1)底端的中部设置有激光传感器(2),所述agv机器人(1)下表面的四周均活动连接有驱动万向轮(3),位于所述agv机器人(1)靠近正面的上表面中部且位于所述agv机器人(1)靠近背面立杆的外侧设置有伸缩搬运台(4),所述伸缩搬运台(4)正面的两端均设置有视觉传感器(5),用于视觉扫描目标货物标签和采集图像数据,所述伸缩搬运台(4)正面的中部设置有雷达探测器(6),所述agv机器人(1)的顶端活动套接有无影射灯组件(7)。
2.根据权利要求1所述的一种基于视觉目标识别系统的agv机器人,其特征在于:所述无影射灯组件(7)的结构包括有灯架(701),所述灯架(701)下表面的中部开设有滑槽(702),所述灯架(701)下表面的四周均设置有球形射灯(703),用于照明进行夜间工作,所述灯架(701)正面的一侧开设有充电槽(704),位于所述灯架(701)正面的一侧且位于所述充电槽(704)的内部固定连接有充电接口(705),所述灯架(701)的内部活动连接有挡板(706)。
3.根据权利要求2所述的一种基于视觉目标识别系统的agv机器人,其特征在于:所述伸缩搬运台(4)的结构包括有搬运架(401),所述搬运架(401)的侧面设置有数据处理芯片(402),所述搬运架(401)靠近背面的内部开设有伸缩轨道(403)。
4.根据权利要求3所述的一种基于视觉目标识别系统的agv机器人,其特征在于:所述agv机器人(1)的结构包括有升降车体(101),所述升降车体(101)背面的一侧设置有开关(102),所述升降车体(101)背面的另一侧设置有智能显示屏(103),位于所述升降车体(101)背面的一侧且位于所述开关(102)的下方开设有散热孔(104),所述升降车体(101)背面底端的中部活动连接有挡门(105),所述升降车体(101)背面底端的中部开设有插座槽(108),位于所述升降车体(101)面底端的中部且位于所述插座槽(108)的内部固定连接有插座接口(109)。
5.根据权利要求4所述的一种基于视觉目标识别系统的agv机器人,其特征在于:所述滑槽(702)的形状与所述升降车体(101)顶端的形状相同,所述挡板(706)的宽度与所述充电槽(704)的宽度相等,所述挡板(706)的长度比所述充电槽(704)的长度要小。
6.根据权利要求4所述的一种基于视觉目标识别系统的agv机器人,其特征在于:所述挡门(105)的长度和宽度分别与所述插座槽(108)的长度和宽度相等,电动升降管(107)底端的直径等于所述升降车体(101)宽度的一半。
技术总结
本技术涉及机器人视觉技术领域,具体为一种基于视觉目标识别系统的AGV机器人,包括AGV机器人,所述AGV机器人底端的中部设置有激光传感器,所述AGV机器人下表面的四周均活动连接有驱动万向轮,位于所述AGV机器人靠近正面的上表面中部且位于所述AGV机器人靠近背面立杆的外侧设置有伸缩搬运台,所述伸缩搬运台正面的两端均设置有视觉传感器;该基于视觉目标识别系统的AGV机器人中,通过在搬运架上设置有视觉传感器和雷达探测器的结构,实现了在AGV机器人上可智能自动化搬运高层货物,可移动的视觉系统随着升降台智能识别目标物体的功能,达到了视觉传感器和雷达探测器随着伸缩搬运台升降调节识别目标的灵活效果。
技术研发人员:刘世严,蒯海波,徐军,徐飞
受保护的技术使用者:苏州冠鸿智能装备有限公司
技术研发日:20230406
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!