一种机械臂分拣头的制作方法
本技术涉及机械臂的领域,特别涉及一种机械臂分拣头。
背景技术:
1、近几年,随着电商等行业的迅猛发展,导致物流行业中微型货物及小型货物的数量猛增,而同一个发货地址可能对应着大量不同的收货地址,因此需要对货物按地址进行分拣。
2、目前,已引入分拣系统对物流货物进行分拣,以减轻相关从业人员的工作负担。分拣系统是这样实现的:待分拣货物会被放在传送带上,位于传送带上游的扫描仪会扫描货物上的物流单从而得到货物的收货地址信息,而后位于传送带下游的机械臂会依据扫描仪所得到的货物信息将货物夹进相对应的收纳箱中,从而完成货物的分拣工作。
3、但上述机械臂一般采用夹持结构来夹持货物,而夹持结构需要对货物施加一定的力才能保证夹持的稳固,从而容易使货物外包装产生形变。
技术实现思路
1、本实用新型的主要目的是提出一种机械臂分拣头,旨在避免机械臂分拣货物时因夹持货物而导致货物的外包装发生形变。
2、为实现上述目的,本实用新型提出的机械臂分拣头,包括:
3、箱体,用于承接货物,所述箱体的一侧用于与机械臂连接;
4、门体结构,所述门体结构可开闭,且所述门体结构设置在所述箱体的底面上;
5、驱动装置,设置在所述箱体的侧面上,所述驱动装置用于驱动所述门体结构开闭;
6、所述驱动装置包括滑轨及两个滑块,所述滑轨设置在所述箱体的侧面上,两个所述滑块皆设置在所述滑轨内且皆在所述滑轨内滑移,两个所述滑块驱使所述门体结构开闭。
7、可选地/在一实施例中,所述门体结构包括两块活动底板和两根转动杆,两块所述活动底板对开设置,两根所述转动杆分别设置在所述箱体底面相对的两条边上,两块所述活动底板各有一侧固定在两根所述转动杆的外圆周侧壁上。
8、可选地/在一实施例中,所述活动底板上设置有用于与转动杆相连的连接条。
9、可选地/在一实施例中,所述驱动装置还包括两根连杆,两根所述连杆的一端分别与两块活动底板相连,两根所述连杆的另一端则分别与两块所述滑块相连接。
10、可选地/在一实施例中,所述滑轨的长度方向分别与两根所述转动杆相垂直,两个所述滑块嵌设在所述滑轨内且沿滑轨长度方向滑移。
11、可选地/在一实施例中,所述驱动装置还包括丝杆,所述丝杆设置在所述滑轨内,且所述丝杆的长度方向与所述滑轨的长度方向平行,两个所述滑块上皆开设有供所述丝杆穿过的螺纹槽,且两个所述滑块的螺纹槽的螺纹方向相反。
12、可选地/在一实施例中,所述滑块远离所述箱体的一侧上设置有第一连接杆,所述连杆的一端转动连接在所述第一连接杆上。
13、可选地/在一实施例中,所述活动底板远离所述箱体的一边上设置有第二连接杆,所述连杆的另一端转动连接在所述第二连接杆上。
14、可选地/在一实施例中,所述滑块的纵截面为梯形,所述滑轨轨道的纵截面也为梯形。
15、本实用新型还提出一种机械臂,包含上述任意一项所述的机械臂分拣头。
16、在本实用新型技术方案中,机械臂可以将分拣头放置在传送带后,从而货物在经由传送带输送后会掉落至箱体中,而后机械臂即根据位于传送带上游的扫描仪传递的信息将分拣头放置于相应的收纳箱上,箱体底面上的门体结构则会在驱动装置的驱使下打开,货物即掉落至收纳箱中,从而完成货物的分拣;而后驱动装置会再次驱动门体结构关闭,机械臂同时会重新移动至传送带后,进而准备下一次分拣;本实用新型利用箱体、门体结构及驱动装置的配合完成了货物的分拣,避免了使用夹持的方式来移动货物,从而避免了货物外包装的变形,进而减小了货物受损的可能性。
技术特征:
1.一种机械臂分拣头,其特征在于,包括:
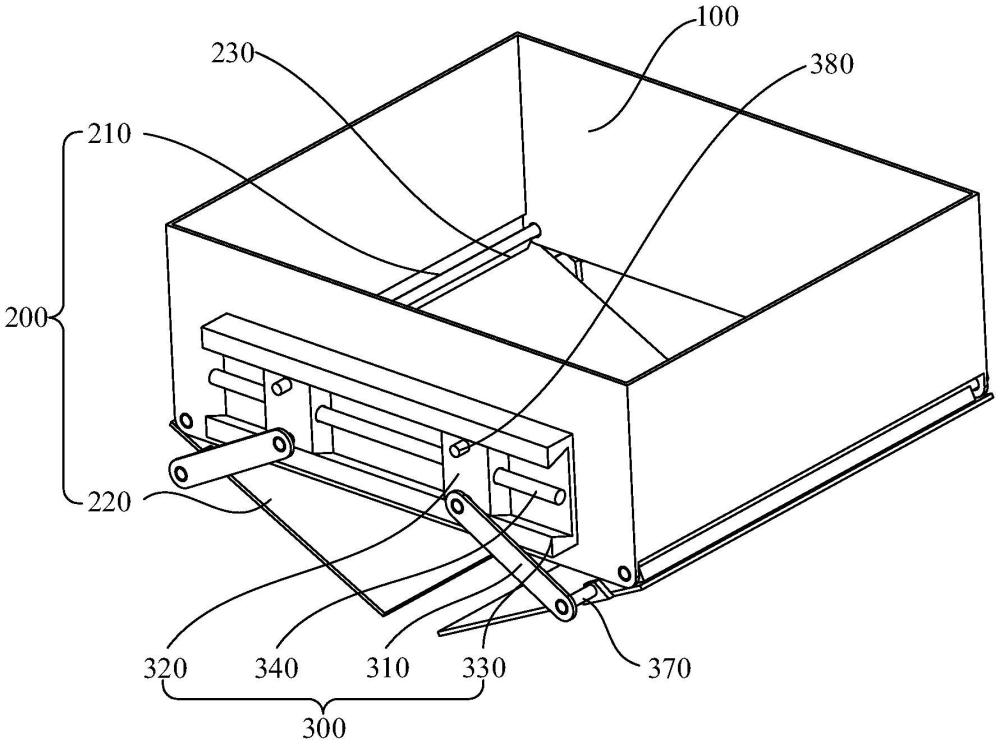
2.如权利要求1所述的机械臂分拣头,其特征在于:所述门体结构(200)包括两块活动底板(210)和两根转动杆(220),两块所述活动底板(210)对开设置,两根所述转动杆(220)分别设置在所述箱体(100)底面相对的两条边上,两块所述活动底板(210)各有一侧固定在两根所述转动杆(220)的外圆周侧壁上。
3.如权利要求2所述的机械臂分拣头,其特征在于:所述活动底板(210)上设置有用于与转动杆(220)相连的连接条(230)。
4.如权利要求2所述的机械臂分拣头,其特征在于:所述驱动装置(300)还包括两根连杆(310),两根所述连杆(310)的一端分别与两块活动底板(210)相连,两根所述连杆(310)的另一端则分别与两块所述滑块(320)相连接。
5.如权利要求4所述的机械臂分拣头,其特征在于:所述滑轨(330)的长度方向分别与两根所述转动杆(220)相垂直,两个所述滑块(320)嵌设在所述滑轨(330)内且沿滑轨(330)长度方向滑移。
6.如权利要求5所述的机械臂分拣头,其特征在于:所述驱动装置(300)还包括丝杆(340),所述丝杆(340)设置在所述滑轨(330)内,且所述丝杆(340)的长度方向与所述滑轨(330)的长度方向平行,两个所述滑块(320)上皆开设有供所述丝杆(340)穿过的螺纹槽(350),且两个所述滑块(320)的螺纹槽(350)的螺纹方向相反。
7.如权利要求5所述的机械臂分拣头,其特征在于:所述滑块(320)远离所述箱体(100)的一侧上设置有第一连接杆(360),所述连杆(310)的一端转动连接在所述第一连接杆(360)上。
8.如权利要求7所述的机械臂分拣头,其特征在于:所述活动底板(210)远离所述箱体(100)的一边上设置有第二连接杆(370),所述连杆(310)的另一端转动连接在所述第二连接杆(370)上。
9.如权利要求5所述的机械臂分拣头,其特征在于:所述滑块(320)的纵截面为梯形,所述滑轨(330)轨道的纵截面也为梯形。
10.一种机械臂,其特征在于:包括如权利要求1至9任意一项所述的机械臂分拣头。
技术总结
本技术公开一种机械臂分拣头,包括箱体,用于承接货物,所述箱体的一侧用于与机械臂连接;门体结构,所述门体结构可开闭,且所述门体结构设置在所述箱体的底面上;驱动装置,设置在所述箱体的侧面上,所述驱动装置用于驱动所述门体结构开闭;所述驱动装置包括滑轨及两个滑块,所述滑轨设置在所述箱体的侧面上,两个所述滑块皆设置在所述滑轨内且皆在所述滑轨内滑移,两个所述滑块驱使所述门体结构开闭。本技术利用箱体、门体结构及驱动装置的配合完成了货物的分拣,避免了使用夹持的方式来移动货物,从而避免了货物外包装的变形。
技术研发人员:曹峰铖
受保护的技术使用者:深圳路辉物流设备有限公司
技术研发日:20230331
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!