一种用于金属制罐的机械手的制作方法
本技术属于生产包装制罐的,涉及一种用于金属制罐的机械手。
背景技术:
1、随着工业产业改造升级,机械手得到大力推广普及。
2、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,机械手特点是可以通过编程来完成各种预期的作业。
3、然而市面上出现的机械手应用于制罐仍存在不足,不能够满足生产的需求,在制罐流水线的检漏工序中,由于市面上的机械手抓取力度一旦设定,不可微调,而制罐的生产特性,不同型号罐体的直径、厚度、抗压力度也不一样,机械手的抓取力度过大,较薄的、较小的罐体就会报废,机械手的抓取力度过小,罐体又会掉下,从而影响生产的可持续性,为此,我们推出一种抓取力度可调的包装制罐机械手,进行码垛。
技术实现思路
1、本实用新型的目的是针对现有的技术存在的上述问题,提供一种用于包装制罐的机械手,本实用新型所要解决的技术问题是如何去实现抓取力度可调。
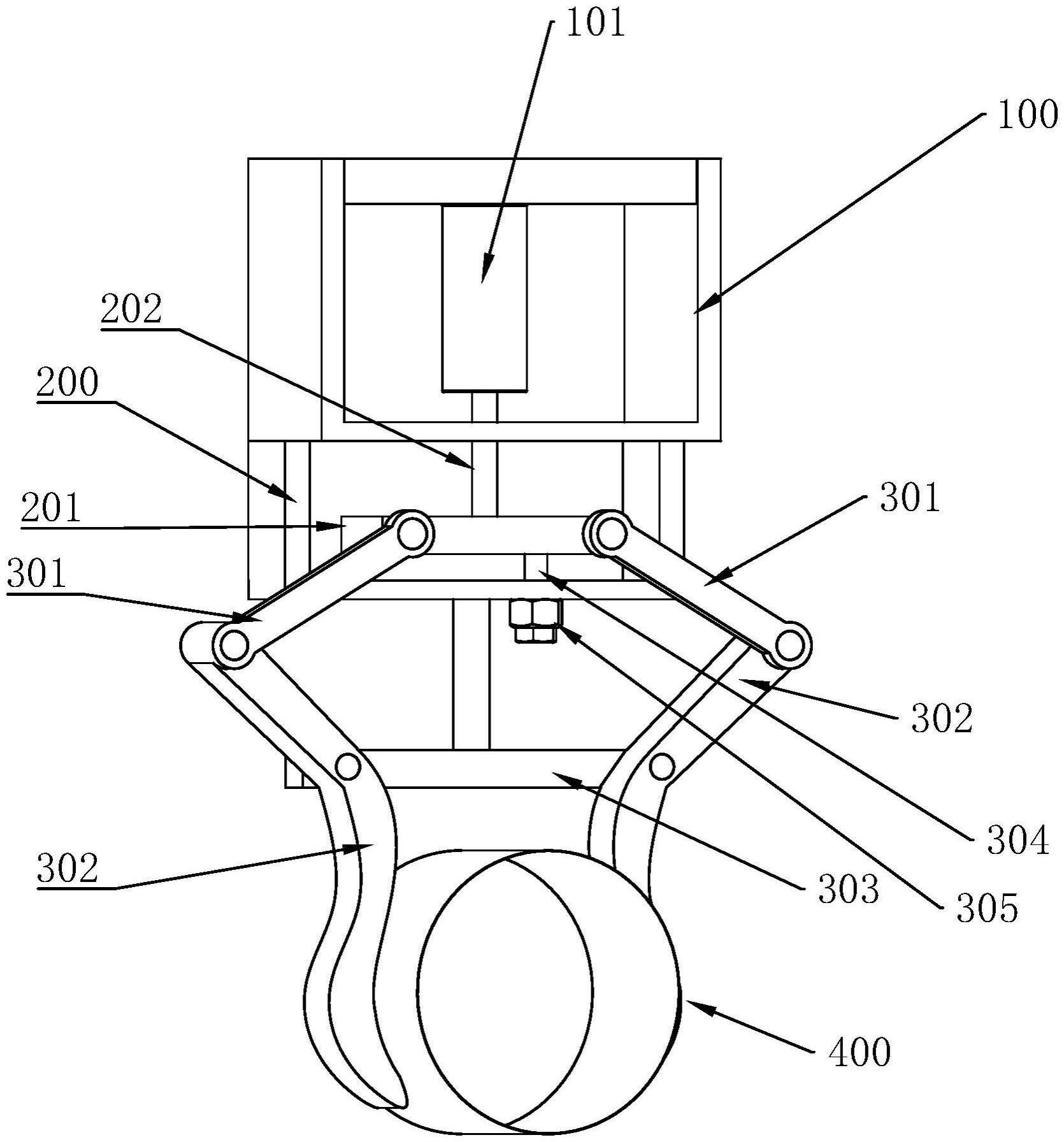
2、本实用新型的目的可通过下列技术方案来实现:一种用于金属制罐的机械手,包括底座、回转装置、手臂机构,所述手臂机构的末端设有一个抓取力度可调的手腕,所述手腕包括安装座,所述安装座包括安装座一部和安装座二部,所述安装座一部设有动力源组件,所述安装座二部设有驱动块,所述驱动块与动力源组件之间设有驱动杆,驱动块的前方连接有抓取机构,安装座二部的前部布有行程调节装置,所述抓取机构包括驱动块,还包括与驱动块铰接装配的对应两连杆,所述两连杆各铰接有对应的一腕杆,两腕杆的弯位之间设有一与其铰接装配的t字支架,所述行程调节装置包括贯穿于安装一部前部且与其螺纹装配的螺栓,所述螺栓的杆部还设有一调节螺母。
3、进一步的,所述驱动杆贯穿于安装座一部的前部,驱动杆与驱动块固定装配。
4、进一步的,所述t字支架固定装配在安装一部的前部。
5、有益效果:与现有技术相比,本实用新型具有以下优点,根据不同直径、不同强度的罐体调节适配的抓取力。
技术特征:
1.一种用于金属制罐的机械手,包括底座(001)、回转装置(002)、手臂机构(003),其特征在于,所述手臂机构(003)的末端设有一个抓取力度可调的手腕,所述手腕包括安装座,所述安装座包括安装座一部(100)和安装座二部(200),所述安装座一部(100)设有动力源组件(101),所述安装座二部(200)设有驱动块(201),所述驱动块(201)与动力源组件(101)之间设有驱动杆(202),驱动块(201)的前方连接有抓取机构,安装座二部(200)的前部布有行程调节装置:
2.根据权利要求1所述的一种用于金属制罐的机械手,其特征在于,所述驱动杆(202)贯穿于安装座一部(100)的前部,驱动杆(202)与驱动块(201)固定装配。
3.根据权利要求1所述的一种用于金属制罐的机械手,其特征在于,所述t字支架(303)固定装配在安装一部的前部。
技术总结
一种用于金属制罐的机械手,属于生产包装制罐的技术领域,包括底座、回转装置、手臂机构,所述手臂机构的末端设有一个抓取力度可调的手腕,所述手腕包括安装座,所述安装座包括安装座一部和安装座二部,所述安装座一部设有动力源组件,所述安装座二部设有驱动块,所述驱动块与动力源组件之间设有驱动杆,驱动块的前方连接有抓取机构,安装座二部的前部布有行程调节装置,有益效果是,根据不同直径、不同强度的罐体调节适配的抓取力。
技术研发人员:沈华加,陈盘水
受保护的技术使用者:华源包装(咸宁)有限公司
技术研发日:20230419
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!