一种带升沉补偿的海上无人平台登临装置的制作方法
本技术涉及石油化工,特别涉及一种带升沉补偿的海上无人平台登临装置。
背景技术:
1、海洋平台的登乘方式通常采用平台吊机将乘坐吊笼的人员或物资从船舶甲板吊到平台甲板上,但对于无人值守的平台或简易井口架式平台,通常采用挂梯+直梯或者电动绞车登乘方式登乘形式。这种登乘方式的固定端一般设置在带缆走道上,秋冬季节登乘人员十分危险,不能适应波浪起伏的工况,且不具备防止外来人员攀爬的功能。
2、因此,一种带升沉补偿的海上无人平台登临装置成为解决问题的关键。
技术实现思路
1、本实用新型的目的在于提供一种带升沉补偿的海上无人平台登临装置,其通过遥控器控制起重机吊臂,能够实现无人平台登临。
2、本实用新型还有一个目的在于提供一种带升沉补偿的海上无人平台登临装置,其设有自动收放缆盒子,能够在登临过程中提供升沉补偿。
3、为实现上述目的,本实用新型采用如下技术方案,包括:
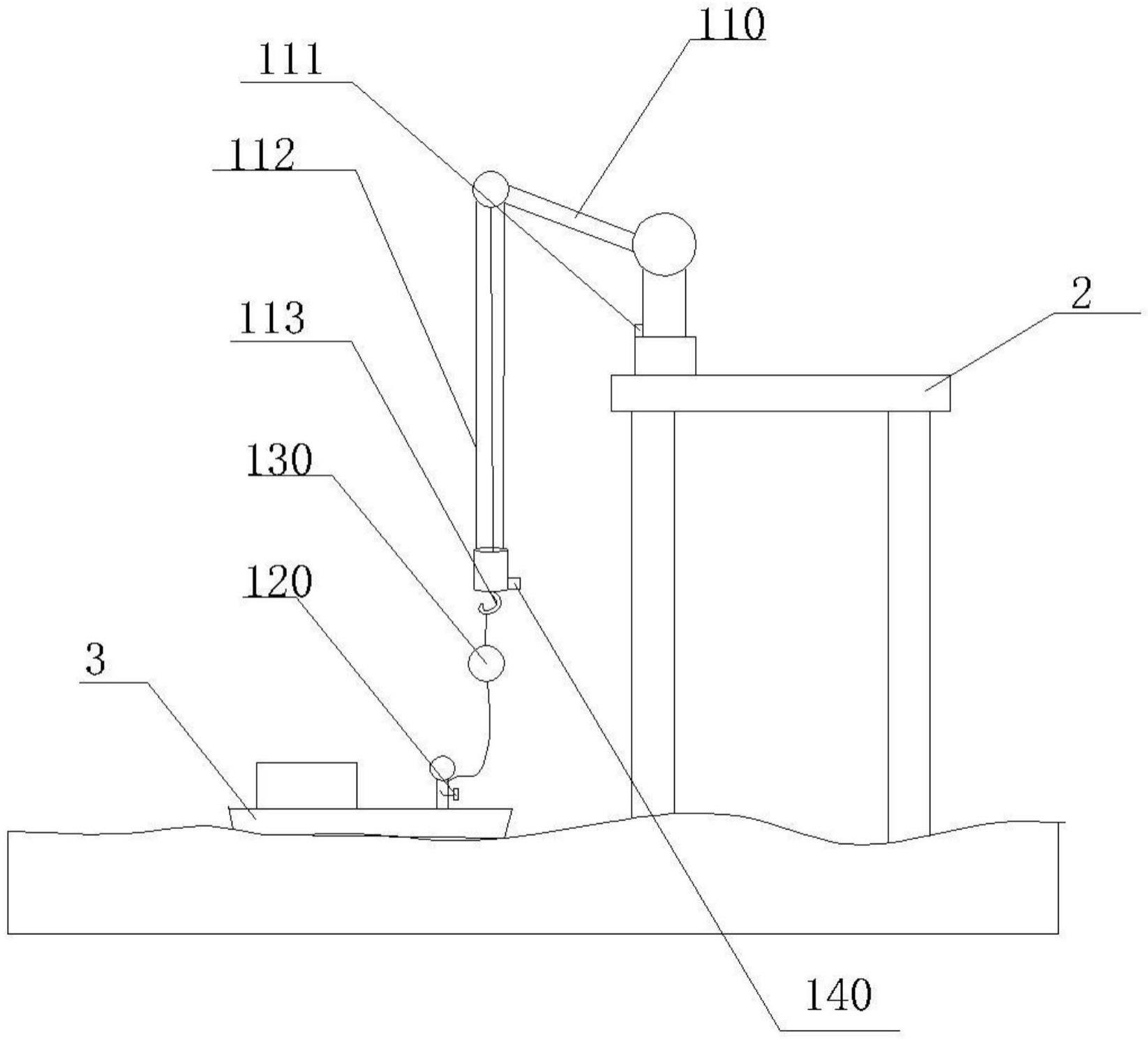
4、起重机吊臂,其设置在平台电仪的边缘,在所述起重机吊臂的自由端设有吊索,在所述吊索下端设有吊钩;
5、起重机信号接收器,其设置在所述起重机吊臂上并与起重机吊臂的控制器电连接,用于接收控制信号,并将控制信号传输至起重机控制器;
6、遥控器,其内设有信号发送器,并与所述起重机信号接收器电连接,用于在待登临人员控制下发送控制信号;
7、自动收放缆盒子,其上端设有用于与所述吊钩连接的吊耳,在所述自动收放缆盒子内设有卷扬机构,在所述卷扬机构上缠绕有缆绳,在所述缆绳末端设有用于与待登临人员连接的挂钩;
8、导向滑轮,其设置在所述自动收放缆盒子内,并位于卷扬机构的正下方,用于对缆绳进行导向;
9、其中,在所述吊钩下端设有用于检测传播状态的激光测距仪,所述激光测距仪与所述起重机吊臂的控制器电连接;在所述自动收放缆盒子内设有用于检测所述导向滑轮旋转圈数的光电接线开关,所述光电接线开关与所述起重机吊臂的控制器电连接。
10、优选的是,所述自动收放缆盒子包括:
11、盒体,其由左侧支撑壁、右侧支撑壁以及设置在所述左侧支撑壁和右侧支撑壁上端的上壁组成;
12、卷扬机构,其分别通过两侧的第一滑轮轴和第二滑轮轴可旋转地架设在所述左侧支撑壁和右侧支撑壁之间;
13、涡形弹簧,其设置在所述左侧支撑壁的外侧,一端与所述第一滑轮轴连接;
14、电磁制动器,其设置在所述右侧支撑壁的外侧,用于锁止所述第二滑轮轴,进而使卷扬机构停止旋转。
15、优选的是,还包括:
16、一对轴承,其分别设置在所述左侧支撑壁和右侧支撑壁,用于旋转支撑所述第一滑轮轴和第二滑轮轴。
17、本实用新型的有益效果是:其通过遥控器控制起重机吊臂,能够实现无人平台登临;设有自动收放缆盒子,能够在登临过程中提供升沉补偿。
技术特征:
1.一种带升沉补偿的海上无人平台登临装置,其特征在于:
2.根据权利要求1中所述的带升沉补偿的海上无人平台登临装置,其特征在于,所述自动收放缆盒子包括:
3.根据权利要求2中所述的带升沉补偿的海上无人平台登临装置,其特征在于,还包括:
技术总结
本技术公开了一种带升沉补偿的海上无人平台登临装置。包括:起重机吊臂设置在平台电仪的边缘,在所述起重机吊臂的自由端设有吊索,在所述吊索下端设有吊钩;起重机信号接收器设置在所述起重机吊臂上并与起重机吊臂的控制器电连接;遥控器内设有信号发送器,并与所述起重机信号接收器电连接;自动收放缆盒子,其上端设有用于与所述吊钩连接的吊耳,在所述自动收放缆盒子内设有卷扬机构,在所述卷扬机构上缠绕有缆绳,在所述缆绳末端设有用于与待登临人员连接的挂钩;导向滑轮,其设置在所述自动收放缆盒子内,并位于卷扬机构的正下方,用于对缆绳进行导向。本技术的有益效果是:设有自动收放缆盒子,能够在登临过程中提供升沉补偿。
技术研发人员:戴国华,桑军,郝铭,马金喜,高国强,庞洪林,邹昌明,单荐
受保护的技术使用者:中海石油(中国)有限公司
技术研发日:20230426
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!