一种方底散装物料袋拆垛装置的制作方法
本技术属于散装物料物流运输的。更具体地,本技术涉及一种方底散装物料袋拆垛装置。
背景技术:
1、当前散装包装袋的出库方案主要是针对是打捆规则的物料,如盒装物料。配合机器人+吸盘的组合形式进行拆垛与搬运。
2、而更多的不规则的散装打捆物料一直采用人工拆垛与搬运的形式,费时费力,从而造成企业的成本攀升,出库效率也大打折扣。
3、现有技术的缺陷:
4、1、人工拆垛,劳动强度大,拆垛效率低,企业的生产成本攀升,且出货效率低;
5、2、塑品公司为追求利益最大化,码垛高度高,拆垛人员需要登高作业,存在很大的安全隐患。
6、现有技术中,检索到以下相关文献:
7、中国专利文献:一种拆垛方法及垛包拆散装置,200910035351.5,其技术方案为:
8、“其拆垛过程包括以下步骤:a、先将垛盘通过叉车送入垛包拆散装置的垛仓内;b、由操作人员将垛盘上的包袋拽入相应溜槽,在拆垛作业中不断提升垛,逐层移出包袋,进入溜槽的包袋依次落入后续输送装置;c、直至拆完整个垛盘,垛包拆散装置复位,准备拆下一垛盘”;
9、其记载的技术效果是:
10、“能辅助操作人员将垛包里的包袋快速拆散成单包,便于向输送系统供料或装车;在拆垛过程中能使垛的顶层包袋始终处在易于搬移位置,操作人员只需顺势拖拽即可把包袋移入溜槽;采用该装置完成拆垛作业,可以节省人力,大大降低作业人员的劳动强度并显著提高拆垛的速率和效率”。
11、但是上述公开的技术方案,只能辅助操作人员的拆垛操作,仍然需要操作人员进行高强度的劳动,仍然存在很大的安全隐患,效率的提高受到很大制约。
技术实现思路
1、本实用新型提供一种方底散装物料袋拆垛装置,其目的是实现散装物料的机械化、自动化的装卸。
2、为了实现上述目的,本实用新型采取的技术方案为:
3、本实用新型的方底散装物料袋拆垛装置,设置拆垛装置基座、抓手机构和气压传动机构;所述的拆垛装置基座的上表面,通过机器人连接座与机器人的机械手臂连接;所述的抓手机构在所述的拆垛装置基座的下方设置机械抓手,所述的机械抓手由所述的气压传动机构驱动;在所述的拆垛装置工作状态下,所述的机械抓手勾住散装物料袋上的捆绑扎带。
4、所述的拆垛装置基座的下表面上设置滑轨,在所述的滑轨上设置与其滑动配合的滑块;所述的机械抓手通过机械抓手座固定安装在滑块上;所述的气压传动机构在所述的滑轨两端外各设置一个抓手驱动气缸,所述的抓手驱动气缸通过气缸座安装在拆垛装置基座的下表面上;所述的手驱动气缸的活塞杆的端部与机械抓手座固定连接。
5、所述的拆垛装置上的抓手机构设置两组,每组抓手机构中的机械抓手的数量为四件;每组抓手机构中的机械抓手座的数量为两个;每两个机械抓手安装在一个机械抓手座上,并朝向另一个机械抓手座的机械抓手折弯。
6、所述的两组抓手机构中的上的滑轨互相垂直。
7、所述的气压传动机构设置气动控制单元,所述的气动控制单元设置在所述的拆垛装置基座的上表面上。
8、所述的气动控制单元采用plc控制器。
9、在所述的气缸座上设置光电检测机构。
10、为了实现与上述技术方案相同的发明目的,本实用新型还提供以上所述的方底散装物料袋拆垛装置的运行控制方法,其过程如下:
11、步骤1、装载有散装物料袋的托盘经过输送线运动到工作位;输送线的感应设备将散装物料袋到位信号传递到机器人;机器人通过机械手臂、机器人连接座及拆垛装置基座,带动该拆垛装置开始向散装物料袋的位置移动;
12、步骤2、机器人到达指定位置后停止运动;机器人传递信号给到该拆垛装置的气动控制单元;所述的气动控制单元中的电磁阀进气口打开,开始供气到对向滑移机构的抓手驱动气缸的调速接头上,使得抓手驱动气缸中的活塞杆做伸出动作,推动滑移机构的机械抓手做相对的滑动,直至机械抓手勾住散装物料袋上的捆绑扎带;
13、步骤3、所述的机械抓手勾住散装物料袋的捆绑扎带后,所述的拆垛装置上的光电检测机构通过漫反射光束确认散装物料袋是否已经被机械抓手抓取;如果确认散装物料袋被抓取,则传递信号至机器人端,所述的机器人带动该拆垛装置与散装物料袋开始向皮带输送线方向移动;
14、步骤4、所述的机器人运动将散装物料袋运送到皮带输送线上方时停止;机器人传递信号到该装置的气动控制单元,气动控制单元控制电磁阀排气口打开,向所述的拆垛装置上的对向滑移机构上的抓手驱动气缸的另一端调速阀供气,控制滑移机构的抓手驱动气缸上的活塞杆做缩回动作,拉动滑移机构上的机械抓手反向移动,使得散装物料袋脱离机械抓手;所述的散装物料袋落在皮带输送线上;
15、步骤5:在所述的抓手驱动气缸的活塞杆做伸出动作完成后,所述的光电检测机构通过漫反射光束没有感知到有散装物料袋时,所述的光电检测机构会传递报警信号给到机器人;机器人停止下一步动作,等待复位命令。
16、在所述的步骤4中,当所述的光电检测机构无检测信号时,机器人带动该拆垛装置离开,等待物料托盘到达工作位的信号,开始下一个循环。
17、在所述的步骤5中,在所述的抓手驱动气缸的活塞杆做缩回动作时,所述的光电检测机构通过漫反射光束依然还能够感知到散装物料袋时,光电检测机构会传递报警信号给到机器人,让机器人原地等待复位命令。
18、本实用新型采用上述技术方案,实现散装方底袋的自动拆垛和搬运,做到无人化操作,可以不间断作业。该装置的结构简单,稳定性好,降低装运的故障率;后期维护成本低;安全性高,防止意外事故的发生;可以不间断作业,提高生产效率。
技术特征:
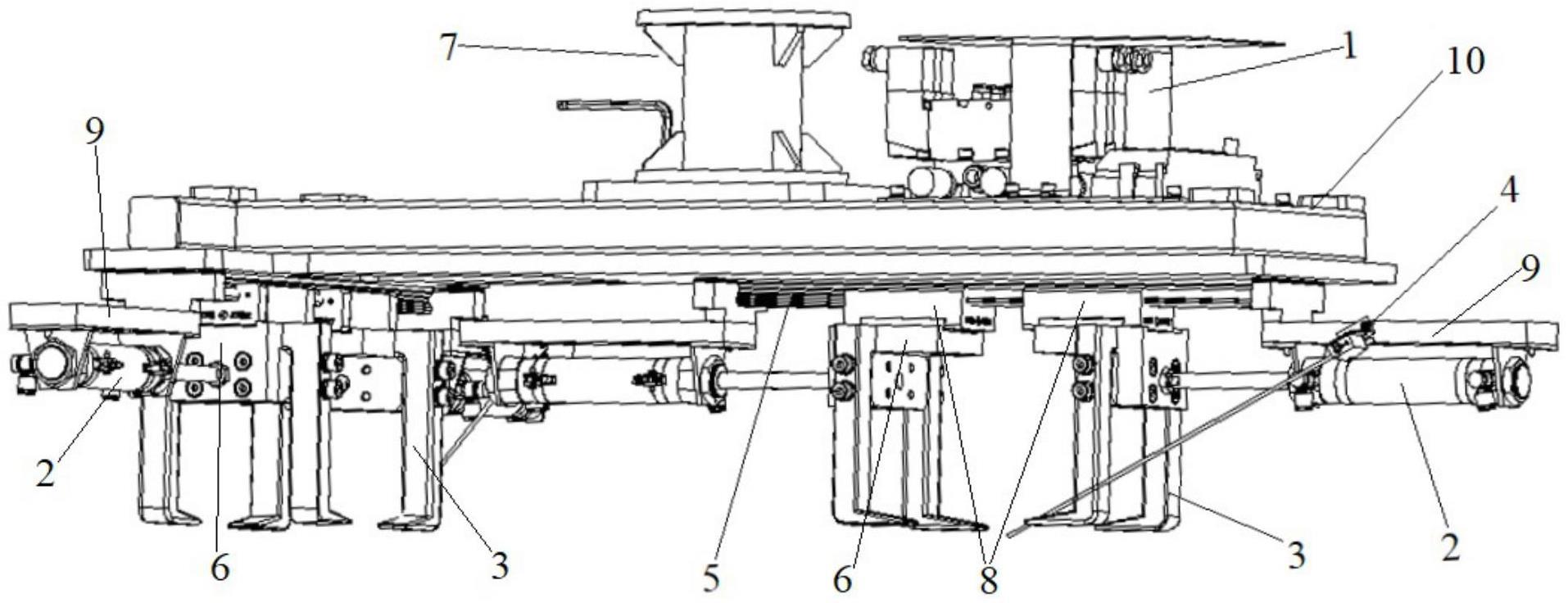
1.一种方底散装物料袋拆垛装置,其特征在于:所述的拆垛装置设置拆垛装置基座(10)、抓手机构和气压传动机构;所述的拆垛装置基座(10)的上表面,通过机器人连接座(7)与机器人的机械手臂连接;所述的抓手机构在所述的拆垛装置基座(10)的下方设置机械抓手(3),所述的机械抓手(3)由所述的气压传动机构驱动;在所述的拆垛装置工作状态下,所述的机械抓手(3)勾住散装物料袋上的捆绑扎带。
2.按照权利要求1所述的方底散装物料袋拆垛装置,其特征在于:所述的拆垛装置基座(10)的下表面上设置滑轨(5),在所述的滑轨(5)上设置与其滑动配合的滑块(8);所述的机械抓手(3)通过机械抓手座(6)固定安装在滑块(8)上;所述的气压传动机构在所述的滑轨(5)两端外各设置一个抓手驱动气缸(2),所述的抓手驱动气缸(2)通过气缸座(9)安装在拆垛装置基座(10)的下表面上;所述的手驱动气缸(2)的活塞杆的端部与机械抓手座(6)固定连接。
3.按照权利要求1所述的方底散装物料袋拆垛装置,其特征在于:所述的拆垛装置上的抓手机构设置两组,每组抓手机构中的机械抓手(3)的数量为四件;每组抓手机构中的机械抓手座(6)的数量为两个;每两个机械抓手(3)安装在一个机械抓手座(6)上,并朝向另一个机械抓手座(6)的机械抓手(3)折弯。
4.按照权利要求3所述的方底散装物料袋拆垛装置,其特征在于:所述的两组抓手机构中的上的滑轨(5)互相垂直。
5.按照权利要求1所述的方底散装物料袋拆垛装置,其特征在于:所述的气压传动机构设置气动控制单元(1),所述的气动控制单元(1)设置在所述的拆垛装置基座(10)的上表面上。
6.按照权利要求5所述的方底散装物料袋拆垛装置,其特征在于:所述的气动控制单元(1)采用plc控制器。
7.按照权利要求2所述的方底散装物料袋拆垛装置,其特征在于:在所述的气缸座(9)上设置光电检测机构(4)。
技术总结
本技术公开了一种方底散装物料袋拆垛装置,设置拆垛装置基座、抓手机构和气压传动机构;拆垛装置基座的上表面,通过机器人连接座与机器人的机械手臂连接;抓手机构在拆垛装置基座的下方设置机械抓手,机械抓手由气压传动机构驱动;在拆垛装置工作状态下,机械抓手勾住散装物料袋上的捆绑扎带。采用上述技术方案,实现散装方底袋的自动拆垛和搬运,做到无人化操作,可以不间断作业。该装置的结构简单,稳定性好,降低装运的故障率;后期维护成本低;安全性高,防止意外事故的发生;可以不间断作业,提高生产效率。
技术研发人员:王秋旗,沈启明,王盛盛,侯宁,李艳军,冯沉冲
受保护的技术使用者:安徽海螺中南智能机器人有限责任公司
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!