一种集装箱空箱堆高机安全作业防护系统的制作方法
本技术涉及集装箱港口装卸运输设备的,尤其涉及一种集装箱空箱堆高机安全作业防护系统。
背景技术:
1、集装箱空箱堆高机(以下简称空叉)一直都是堆垛空箱主力,有速度快、操作灵活和省空间等特点,然而在省空间同时,箱与箱之间靠太近,堆垛不规范,容易引发集装箱连环撞击或者因为单箱滚落撞倒其他集装箱的事故(称为打保龄),更有甚者一个集装箱倾倒会引发其它的集装箱连锁反应,导致更多集装箱倾倒。严重危及司机生命安全和设备安全,还有下雨天和夜间司机看不到三层箱以上锁头是否对正箱孔;上下集装箱是否对齐。
技术实现思路
1、为了解决上述背景技术中的问题,本实用新型提供了一种集装箱空箱堆高机安全作业防护系统,便于对集装箱之间相对位置的检测和观看,且解决了现有容易发生集装箱倾倒的问题。
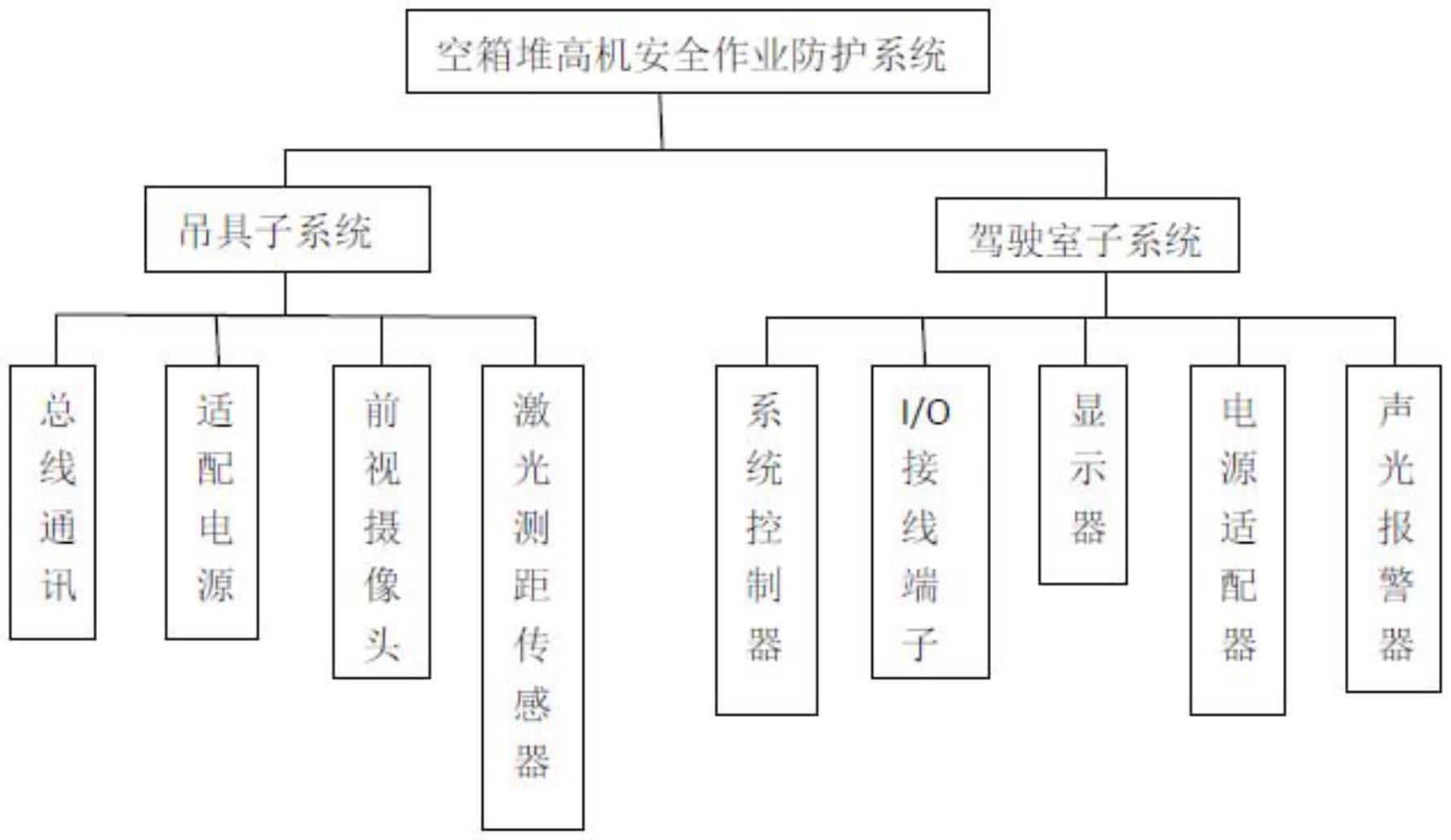
2、本实用新型解决其技术问题所采取的方案是:一种集装箱空箱堆高机安全作业防护系统,包括吊具子系统和驾驶室子系统、控制系统,其中吊具子系统包括总线通讯、适配电源、前视摄像头、激光测距传感器,其中驾驶室子系统包括系统控制器、电源适配器、显示器、声光报警器,其中总线通讯为原车can bus总线通讯,适配电源为原车适配电源,前视摄像头为无线红外摄像头,激光测距传感器安装空叉左右臂架头上方以便作业时对前方箱距进行扫描测距,前视摄像头安装空叉左右臂架头上方以便采集的作业图像,系统控制器与前视摄像头电性连接以便获取空叉的作业工况,系统控制器与激光测距传感器电性连接以便接收激光测距数据,电源适配器与原车适配电源、激光测距传感器、摄像头、显示器、声光报警器直接或间接电性连接以便从驾驶室获取适配电源后经转换向控制柜内设备、激光测距传感器、摄像机、显示器、声光报警器供电,显示器安装在驾驶室右前方以便显示前视摄像头采集的作业图像以及系统的工作状态,声光报警器安装在驾驶室内且电按箱左侧以便接收控制器发出的信号并发出声光,控制系统包括控制空叉门架的控制电路系统、控制空叉门架的控制液压系统。
3、进一步的,系统控制器选用为cr711s。
4、进一步的,适配电源为24v。
5、进一步的,前视摄像头为veise1080p无线红外摄像头ipcam,内置2.4ghz无线发射模块。
6、进一步的,显示器为数字无线车载显示器,为彩色液晶显示器。
7、进一步的,激光测距传感器选用ifm型号为01d105激光测距传感器。
8、进一步的,控制电路系统包括系统控制器、二位电磁阀、操作手柄、主阀、齿轮泵、锁止阀,系统控制器与二位电磁阀、操作手柄、主阀、齿轮泵、锁止阀电性连接。
9、进一步的,控制液压系统包括储能器、操作手柄、过滤器、减压阀、二位电磁阀、主阀、齿轮泵、锁止阀、倾斜油缸、油箱,油箱与储能器、操作手柄、主阀以油路连接,过滤器、减压阀设置在油箱与操作手柄的油路上,过滤器、齿轮泵设置在油箱与主阀的油路上,操作手柄、二位电磁阀、主阀依次以油路连接,主阀与倾斜油缸油路连接,锁止阀设置在主阀向倾斜油缸输入油路上。
10、进一步的,系统控制器与电源适配器、原车适配电源、激光测距传感器、摄像头、显示器、声光报警器均通过i/o接线端子插接连接。
11、进一步的,还包括测距警报电路,测距警报电路包括继电器k1、继电器k2、继电器k3、继电器k4、左边激光测距传感器b1、右边激光测距传感器b2、蜂鸣器h1、二位三通电磁阀y1,其中左边激光测距传感器b1、右边激光测距传感器b2的正极与系统控制器的正极电性连接,左边激光测距传感器b1、右边激光测距传感器b2的负极与系统控制器的负极电性连接或接地,左边激光测距传感器b1的一个输出端与继电器k1电性连接后接地,左边激光测距传感器b1的一个输出端与继电器k2电性连接后接地,右边激光测距传感器b2的一个输出端与继电器k1电性连接后接地,右边激光测距传感器b2的一个输出端与继电器k2电性连接后接地,继电器k1、继电器k2、继电器k3、继电器k4并联后与蜂鸣器h1串联并与系统控制器的正极和负极电性连接,继电器k2、继电器k4并联后与二位三通电磁阀y1串联并与系统控制器的正极和负极电性连接。
12、综上所述,本实用新型的有益效果为:本实用新型通过设置前视摄像头、激光测距传感器,可以对集装箱之间相对位置的检测和观看,通过设置声光报警器以及控制电路系统、控制液压系统来使司机感知集装箱之间相对位置和控制门架前倾,从而防止事故的发生,保障码头运输工作秩序,提高码头运输工作效率。
13、上述说明仅是本实用新型的技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种集装箱空箱堆高机安全作业防护系统,其特征在于:包括吊具子系统和驾驶室子系统、控制系统,其中所述吊具子系统包括总线通讯、适配电源、前视摄像头、激光测距传感器,其中所述驾驶室子系统包括系统控制器、电源适配器、显示器、声光报警器,其中所述总线通讯为原车can bus总线通讯,所述适配电源为原车适配电源,所述前视摄像头为无线红外摄像头,所述激光测距传感器安装空叉左右臂架头上方以便作业时对前方箱距进行扫描测距,所述前视摄像头安装空叉左右臂架头上方以便采集的作业图像,所述系统控制器与前视摄像头电性连接以便获取空叉的作业工况,所述系统控制器与激光测距传感器电性连接以便接收激光测距数据,所述电源适配器与原车适配电源、激光测距传感器、摄像头、显示器、声光报警器直接或间接电性连接以便从驾驶室获取适配电源后经转换向控制柜内设备、激光测距传感器、摄像机、显示器、声光报警器供电,所述显示器安装在驾驶室右前方以便显示前视摄像头采集的作业图像以及系统的工作状态,所述声光报警器安装在驾驶室内且电按箱左侧以便接收控制器发出的信号并发出声光,所述控制系统包括控制空叉门架的控制电路系统、控制空叉门架的控制液压系统。
2.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述系统控制器选用为cr711s。
3.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述适配电源为24v。
4.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述前视摄像头为veise1080p无线红外摄像头ipcam,内置2.4ghz无线发射模块。
5.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述显示器为数字无线车载显示器,为彩色液晶显示器。
6.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述激光测距传感器选用ifm型号为01d105激光测距传感器。
7.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述控制电路系统包括系统控制器、二位电磁阀、操作手柄、主阀、齿轮泵、锁止阀,所述系统控制器与二位电磁阀、操作手柄、主阀、齿轮泵、锁止阀电性连接。
8.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述控制液压系统包括储能器、操作手柄、过滤器、减压阀、二位电磁阀、主阀、齿轮泵、锁止阀、倾斜油缸、油箱,其中所述油箱与储能器、操作手柄、主阀以油路连接,所述过滤器、减压阀设置在油箱与操作手柄的油路上,所述过滤器、齿轮泵设置在油箱与主阀的油路上,所述操作手柄、二位电磁阀、主阀依次以油路连接,所述主阀与倾斜油缸油路连接,所述锁止阀设置在主阀向倾斜油缸输入油路上。
9.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:所述系统控制器与电源适配器、原车适配电源、激光测距传感器、摄像头、显示器、声光报警器均通过i/0接线端子插接连接。
10.根据权利要求1所述的集装箱空箱堆高机安全作业防护系统,其特征在于:还包括测距警报电路,所述测距警报电路包括继电器k1、继电器k2、继电器k3、继电器k4、左边激光测距传感器b1、右边激光测距传感器b2、蜂鸣器h1、二位三通电磁阀y1,其中所述左边激光测距传感器b1、右边激光测距传感器b2的正极与系统控制器的正极电性连接,所述左边激光测距传感器b1、右边激光测距传感器b2的负极与系统控制器的负极电性连接或接地,所述左边激光测距传感器b1的一个输出端与继电器k1电性连接后接地,所述左边激光测距传感器b1的一个输出端与继电器k2电性连接后接地,所述右边激光测距传感器b2的一个输出端与继电器k1电性连接后接地,所述右边激光测距传感器b2的一个输出端与继电器k2电性连接后接地,所述继电器k1、继电器k2、继电器k3、继电器k4并联后与蜂鸣器h1串联并与系统控制器的正极和负极电性连接,所述继电器k2、继电器k4并联后与二位三通电磁阀y1串联并与系统控制器的正极和负极电性连接。
技术总结
本技术涉及集装箱港口装卸运输设备的技术领域,尤其涉及一种集装箱空箱堆高机安全作业防护系统,包括吊具子系统和驾驶室子系统、控制电路系统、控制液压系统,吊具子系统包括总线通讯、适配电源、前视摄像头、激光测距传感器,驾驶室子系统包括系统控制器、电源适配器、显示器、声光报警器。本技术通过设置前视摄像头、激光测距传感器,可以对集装箱之间相对位置的检测和观看,通过设置声光报警器以及控制电路系统、控制液压系统来使司机感知集装箱之间相对位置和控制门架前倾,从而防止事故的发生,保障码头运输工作秩序,提高码头运输工作效率。
技术研发人员:王小杰,古园坐,孔维平,蔡勇涛,陈卫,李言,李朝雄,高建军,罗英华,张清理,李中海,赵忠鹏,黄锦涛,车原宇
受保护的技术使用者:赤湾集装箱码头有限公司
技术研发日:20230425
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!