一种用于棘轮码垛机的搬运车的制作方法
本技术涉及棘轮码垛机的搬运设备领域,特别涉及用于棘轮码垛机的搬运车。
背景技术:
1、在棘轮的生产制造过程中,当完成铸造加工后的棘轮需要进行码垛,以往的码垛需要人工进行搬运,从而就导致效率低、劳动强度大,安全性也无法得到保障;现有工厂里的码垛逐渐取代纯人工的搬运,而是采用适用于棘轮搬运的码垛机,但码垛机在码垛的过程中,仍然需要将码垛好的棘轮搬运至固定的场地或库房进行存储,现有的搬运常常采用叉车进行搬运,但每次搬运时都需要码垛机停止工作,叉车才能进场搬运,从而就导致码垛效率受到了极大的影响,因此,急需提供一种用于棘轮码垛机的搬运车。
技术实现思路
1、为此,需要提供一种效率高、便于自动化控制的用于棘轮码垛机的搬运车。
2、为实现上述目的,发明人提供了一种用于棘轮码垛机的搬运车,包括:底板、码垛机、搬运车和驱动机构;
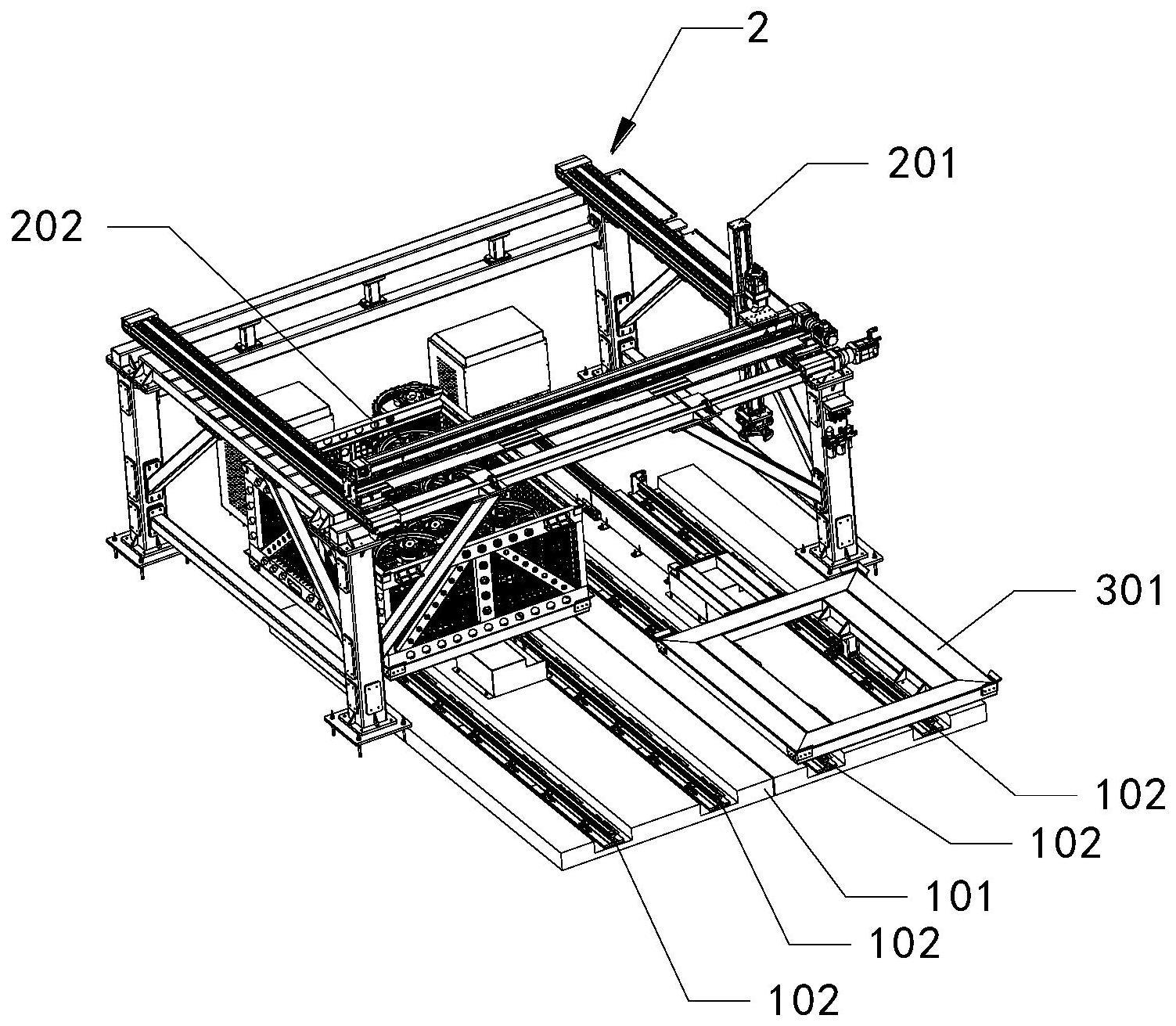
3、所述码垛机设于底板的上方,所述码垛机包括码垛机构和码垛筐,所述码垛机构用于将棘轮码垛至码垛筐内,所述码垛筐设于搬运车上,所述底板上设有导轨,所述搬运车底部设有行走机构,所述行走机构与导轨适配,所述驱动机构的输出端与搬运车传动连接。
4、作为本实用新型的一种优选结构,所述底板上设有若干导轨,所述搬运车底部对称设有行走机构,所述行走机构包括与搬运车底端端面固定连接的耳座,所述耳座上设有转动连接的滚轮,所述滚轮与导轨适配。
5、作为本实用新型的一种优选结构,所述耳座的底端端面上固定设有限位块,所述限位块上开设有限位口,所述限位口与导轨适配。
6、作为本实用新型的一种优选结构,所述底板上平行设有四条导轨,所述搬运车为两个。
7、作为本实用新型的一种优选结构,位于码垛机下方的底板上固定设有转动轮,所述转动轮设于两个导轨之间,所述驱动机构的输出端通过传动链条与转动轮传动连接,所述搬运车与传动链条固定连接。
8、作为本实用新型的一种优选结构,所述搬运车朝向驱动机构的输出端设有延伸架,所述延伸架的端部设有固定块,所述固定块与传动链条固定连接。
9、作为本实用新型的一种优选结构,位于固定块一侧下方设有触片,所述底板上设有行程开关。
10、作为本实用新型的一种优选结构,所述驱动机构包括驱动电机,所述驱动电机通过传动链条与搬运车传动连接。
11、区别于现有技术,上述技术方案所达到的有益效果有:
12、通过在码垛机下方设置搬运车可以有效的提高码垛效率,且将码垛筐放置在搬运车上,当码垛筐放满之后,驱动机构即可驱动搬运车从码垛机下方移走,并将载有空的码垛筐的搬运车移动到码垛机下方,让码垛机持续对棘轮进行码垛摆放,整个过程码垛机可以持续工作,搬运过程中,无需停止工作,从而可以有效的提高码垛效率,全程可实现自动化控制,自动化程度高;此外,通过导轨移动搬运车可以使得搬运车更加平稳,避免码垛筐内的棘轮发生移位和碰撞。
技术特征:
1.一种用于棘轮码垛机的搬运车,其特征在于,包括:底板、码垛机、搬运车和驱动机构;
2.根据权利要求1所述的用于棘轮码垛机的搬运车,其特征在于:所述底板上设有若干导轨,所述搬运车底部对称设有行走机构,所述行走机构包括与搬运车底端端面固定连接的耳座,所述耳座上设有转动连接的滚轮,所述滚轮与导轨适配。
3.根据权利要求2所述的用于棘轮码垛机的搬运车,其特征在于:所述耳座的底端端面上固定设有限位块,所述限位块上开设有限位口,所述限位口与导轨适配。
4.根据权利要求1所述的用于棘轮码垛机的搬运车,其特征在于:所述底板上平行设有四条导轨,所述搬运车为两个。
5.根据权利要求4所述的用于棘轮码垛机的搬运车,其特征在于:位于码垛机下方的底板上固定设有转动轮,所述转动轮设于两个导轨之间,所述驱动机构的输出端通过传动链条与转动轮传动连接,所述搬运车与传动链条固定连接。
6.根据权利要求5所述的用于棘轮码垛机的搬运车,其特征在于:所述搬运车朝向驱动机构的输出端设有延伸架,所述延伸架的端部设有固定块,所述固定块与传动链条固定连接。
7.根据权利要求6所述的用于棘轮码垛机的搬运车,其特征在于:位于固定块一侧下方设有触片,所述底板上设有行程开关。
8.根据权利要求5所述的用于棘轮码垛机的搬运车,其特征在于:所述驱动机构包括驱动电机,所述驱动电机通过传动链条与搬运车传动连接。
技术总结
本技术公开了一种用于棘轮码垛机的搬运车,包括:底板、码垛机、搬运车和驱动机构;所述码垛机设于底板的上方,所述码垛机包括码垛机构和码垛筐,所述码垛机构用于将棘轮码垛至码垛筐内,所述码垛筐设于搬运车上,所述底板上设有导轨,所述搬运车底部设有行走机构,所述行走机构与导轨适配,所述驱动机构的输出端与搬运车传动连接;本方案具有效率高、便于自动化控制的特点。
技术研发人员:张培军,胡开俊,贾帅军
受保护的技术使用者:江苏天宏智能装备有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!