工件抓取模组及转移设备的制作方法
本申请涉及搬运设备,具体地,涉及一种工件抓取模组及转移设备。
背景技术:
1、大型桁架类的工件,加工和运输时都需要进行搬运转移。例如塔式起重机的标准节,在加工过程中需要将其转运到不同的工位进行加工处理。现有的技术方案通常使用起重吊带缠绕住标准节,再配合车间内的行车进行转移。
2、现有转运方式主要存在三个缺点:
3、①采用起重吊带吊装标准节时,起重吊带的缠绕时间较长;
4、②在起吊时,为了能够将标准节水平吊起,需要调整吊带的长度和位置;
5、③起重吊带在使用过程中会发生磨损,需要及时更换。若在标准节转移过程中起重吊带滑脱或断裂可能会发生安全事故。
技术实现思路
1、本申请的目的在于提供一种工件抓取模组及转移设备,用以解决现有技术中存在的不足。
2、为达上述目的,第一方面,本申请提供了一种工件抓取模组,用于抓取桁架类的工件,所述工件抓取模组包括:
3、柔性驱动模块,用于与转移设备的起吊模组连接;
4、刚性夹持模块,包括驱动部、夹持部和自锁部,所述驱动部与所述柔性驱动模块连接,所述夹持部与所述驱动部联动配合,所述夹持部用于抱夹所述工件,所述自锁部位于所述驱动部与所述夹持部之间,其中,当所述起吊模组沿竖直提拉所述柔性驱动模块时,所述柔性驱动模块可通过驱动所述驱动部联动所述夹持部,以使所述夹持部执行抱夹动作;和
5、自锁连接模块,设置于所述自锁部,所述自锁连接模块用于连接所述夹持部与所述驱动部,用以限制所述夹持部执行抱夹动作。
6、作为上述技术方案的进一步改进:
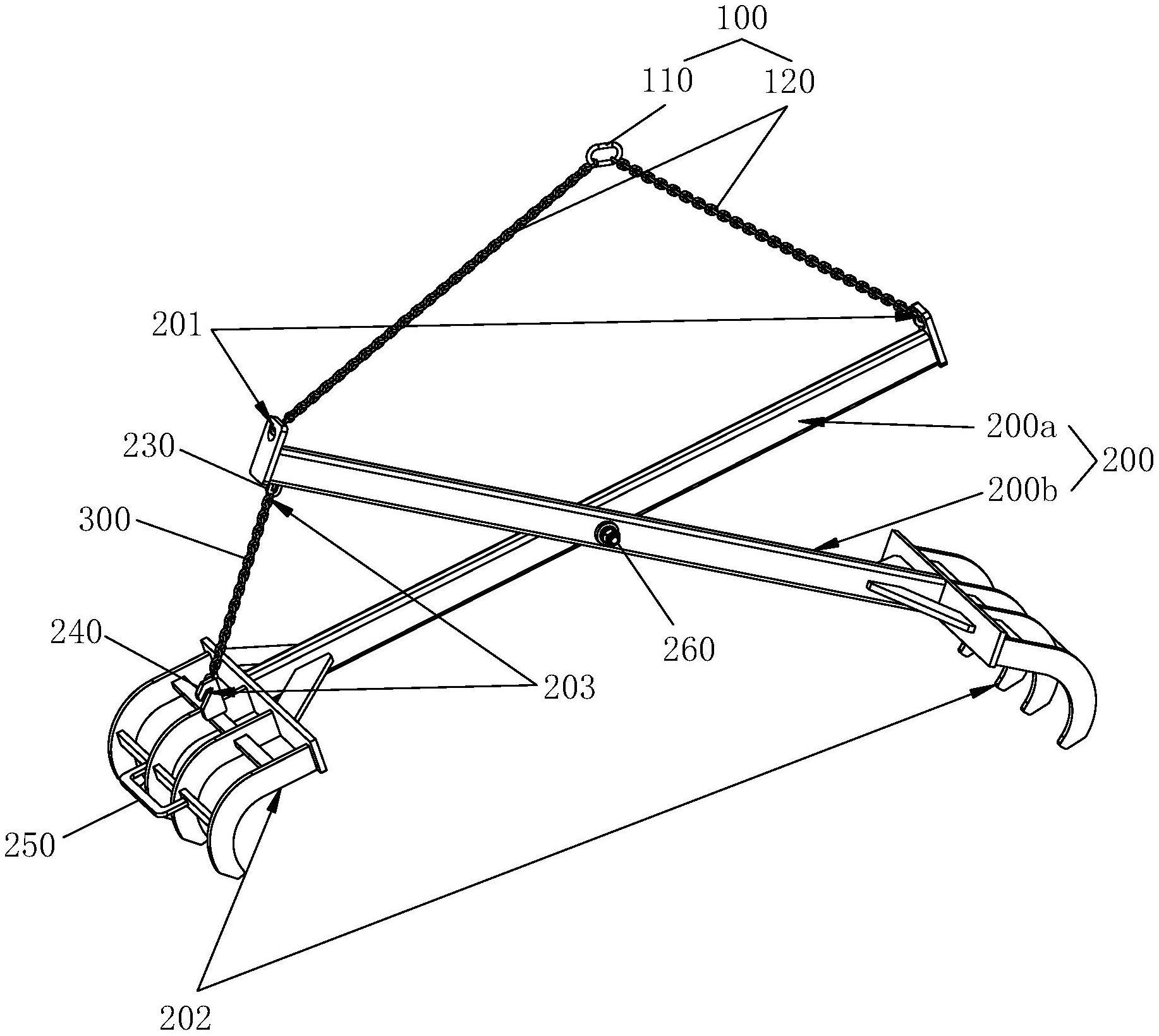
7、结合第一方面,在一种可能的实施方式中,所述柔性驱动模块包括:
8、吊环,用于与所述起吊模组连接;和
9、柔性起重绳索,包括位于中部的提拉部以及位于两端的连接部,所述提拉部设置有所述吊环,所述连接部用于连接所述驱动部。
10、结合第一方面,在一种可能的实施方式中,所述柔性起重绳索和所述自锁连接模块均包括铁链索、钢丝绳锁或吊带。
11、结合第一方面,在一种可能的实施方式中,所述刚性夹持模块包括第一夹持组件和第二夹持组件,所述第一夹持组件和所述第二夹持组件中部枢转配合;
12、其中,所述第一夹持组件和所述第二夹持组件的一端共同形成所述驱动部,所述第一夹持组件和所述第二夹持组件的另一端共同形成所述夹持部,所述第一夹持组件的一端和所述第二夹持组件的另一端之间形成所述自锁部。
13、结合第一方面,在一种可能的实施方式中,所述第一夹持组件和所述第二夹持组件均包括:
14、夹爪;和
15、臂架,沿自身长度方向的一端用连接所述柔性驱动模块,另一端设置有所述夹爪;
16、其中,所述第一夹持组件和所述第二夹持组件中的所述夹爪对称布置,并用于抱夹所述工件。
17、结合第一方面,在一种可能的实施方式中,所述夹爪包括:
18、安装基板,与所述臂架连接;和
19、多个爪齿,设置于所述安装基板并沿所述安装基板的长度方向间隔分布,其中,相邻两个所述爪齿之间设置有加强筋。
20、结合第一方面,在一种可能的实施方式中,所述第一夹持组件的所述臂架靠近所述柔性驱动模块的一端与所述自锁连接模块连接,所述第二夹持组件的所述夹爪的背部设有挂钩,所述自锁连接模块与所述挂钩可拆卸连接。
21、结合第一方面,在一种可能的实施方式中,所述第一夹持组件和所述第二夹持组件均包括用于抱夹所述工件的夹爪,所述夹爪包括腹部和相对的背部,所述腹部向所述背部凹陷形成有适配所述工件外棱廓形状的收容部。
22、结合第一方面,在一种可能的实施方式中,所述第一夹持组件和所述第二夹持组件均包括用于抱夹所述工件的夹爪,所述夹爪包括腹部和相对的背部,所述背部设有把手。
23、为达上述目的,第二方面,本申请还提供了一种转移设备,包括起重行车及根据上述第一方面提供的工件抓取模组,所述起重行车中的起吊模组连接所述柔性驱动模块。
24、相比于现有技术,本申请的有益效果:
25、本申请提供了一种工件抓取模组及转移设备,其中,工件抓取模组包括柔性驱动模块、刚性夹持模块和自锁连接模块;刚性夹持模块包括自锁部以及联动配合的驱动部和夹持部,当起吊模组沿竖直提拉柔性驱动模块时,柔性驱动模块可通过驱动所述驱动部联动夹持部,此时夹持部执行抱夹动作,从而夹持住工件,当起吊模组沿竖直继续提拉时,工件抓取模组会夹持工件一并提升,实现工件的转移。在工件抓取模组未抱夹工件时,可通过自锁连接模块连接夹持部与驱动部,用以限制夹持部与驱动部之间的联动。由此,本申请提供的工件抓取模组采用的是提升时同步抱夹工件的方式,无需采用吊带缠绕工件,从而无需调整吊带等操作,极大地节省时间。另外通过抱夹工件可确保工件起吊时的平稳性更好,更加安全可靠。同时工件抓取模组的磨损少,使用寿命长。
26、本申请的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种工件抓取模组,用于抓取桁架类的工件,其特征在于,所述工件抓取模组包括:
2.根据权利要求1所述的工件抓取模组,其特征在于,所述柔性驱动模块(100)包括:
3.根据权利要求2所述的工件抓取模组,其特征在于,所述柔性起重绳索(120)和所述自锁连接模块(300)均包括铁链索、钢丝绳锁或吊带。
4.根据权利要求1-3中任一项所述的工件抓取模组,其特征在于,所述刚性夹持模块(200)包括第一夹持组件(200a)和第二夹持组件(200b),所述第一夹持组件(200a)和所述第二夹持组件(200b)中部枢转配合;
5.根据权利要求4所述的工件抓取模组,其特征在于,所述第一夹持组件(200a)和所述第二夹持组件(200b)均包括:
6.根据权利要求5所述的工件抓取模组,其特征在于,所述夹爪(210)包括:
7.根据权利要求5所述的工件抓取模组,其特征在于,所述第一夹持组件(200a)的所述臂架(220)靠近所述柔性驱动模块(100)的一端与所述自锁连接模块(300)连接,所述第二夹持组件(200b)的所述夹爪(210)的背部(212)设有挂钩(240),所述自锁连接模块(300)与所述挂钩(240)可拆卸连接。
8.根据权利要求4所述的工件抓取模组,其特征在于,所述第一夹持组件(200a)和所述第二夹持组件(200b)均包括用于抱夹所述工件的夹爪(210),所述夹爪(210)包括腹部(211)和相对的背部(212),所述腹部(211)向所述背部(212)凹陷形成有适配所述工件外棱廓形状的收容部。
9.根据权利要求4所述的工件抓取模组,其特征在于,所述第一夹持组件(200a)和所述第二夹持组件(200b)均包括用于抱夹所述工件的夹爪(210),所述夹爪(210)包括腹部(211)和相对的背部(212),所述背部(212)设有把手(250)。
10.一种转移设备,其特征在于,包括起重行车及根据权利要求1-9中任一项所述的工件抓取模组,所述起重行车中的起吊模组连接所述柔性驱动模块(100)。
技术总结
本申请提供了一种工件抓取模组及转移设备,涉及搬运设备技术领域。工件抓取模组包括柔性驱动模块、刚性夹持模块和自锁连接模块;刚性夹持模块包括自锁部以及联动配合的驱动部和夹持部,驱动部与柔性驱动模块连接,夹持部用于抱夹工件,自锁部位于驱动部与夹持部之间,当起吊模组沿竖直提拉柔性驱动模块时,柔性驱动模块可通过驱动所述驱动部联动夹持部,以使夹持部执行抱夹动作;自锁连接模块设置于自锁部,用以限制夹持部执行抱夹动作。由此,本申请提供的工件抓取模组操作简单,极大地节省时间,安全可靠,使用寿命长。
技术研发人员:杨兴发,杨银,汪壮,喻宇福,文桂林,周兴旺
受保护的技术使用者:长沙市速工科技有限责任公司
技术研发日:20230516
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!