一种平库机器人的制作方法
本技术涉及agv(automated guided vehicle,自动导引运输车)的物料搬运系统设备,具体为一种平库机器人。
背景技术:
1、agv搬运系统指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源。一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
2、然而,现有的搬运系统大多数都是基于整垛、整包作业的模式,只能起到平整搬运,无法实现托举指定摆放,搬运后需要工作人员再次进行分类存放,具有一定的风险。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种平库机器人,解决了上述背景技术中提出的问题,本实用新型研发了一套平库机器人,区别与传统的agv搬运系统;平库机器人的单次作业既可以完成整垛、整包作业任务,又可以完成零星作业任务,作业形式灵活。
3、(二)技术方案
4、为实现以上目的,本实用新型通过以下技术方案予以实现:
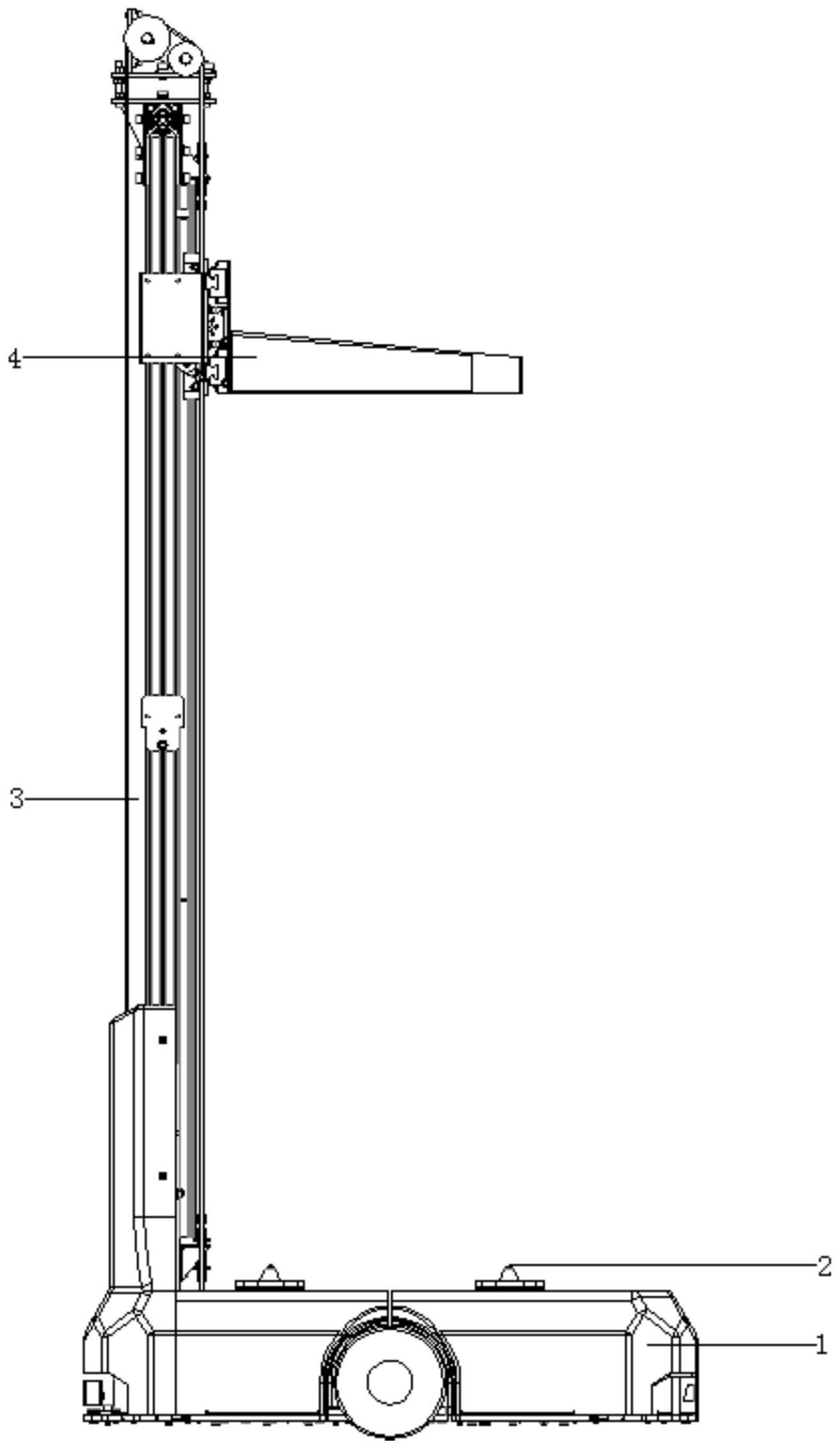
5、一种平库机器人,包括agv驱动小车,agv驱动小车包括驱动轮与机架,驱动轮设置于机架下方;agv驱动小车上设置有顶举装置、悬挂缓冲弹簧、升降同步装置以及报夹装置;顶举装置设置于agv驱动小车内部且顶举装置与agv驱动小车之间设置悬挂缓冲弹簧;agv驱动小车外部一侧垂直设置有升降同步装置,升降同步装置上固定设置报夹装置,agv驱动小车上设置有电机,升降同步装置以及报夹装置与电机之间电路连接。
6、进一步优选,所述顶举装置包括举顶平台与步进电机,步进电机两侧分别设置有丝杆升降装置,丝杆升降装置与步进电机之间连接有轴连器,举顶平台与丝杆升降装置之间设置有升降轴且升降轴延伸出举顶平台上固定设置于定位锥;机架分为前机架以及后机架,前机架与后机架的中轴线两侧分别布置辅助万向轮,机架下方两侧分别安装驱动轮。
7、进一步优选,所述升降同步装置包括升降机架,升降机架上设置有同步轴承,同步轴承上套接同步带;升降机架中间设置有导轨,导轨上设置若干定位孔,导轨上套接滑动固定块,导轨上下两端分别设置有同步带张紧装置以及缓冲器,升降机架末端设置有电源。
8、进一步优选,所述报夹装置4包括报夹臂与支座板,报夹臂分别设置在支座板两侧形成“门”字形;支座板上设置有丝杆电机、传感器以及传感器支架,报夹臂上安装有若干调整固定块,报夹臂末端设置有报夹爪。
9、进一步优选,所述报夹装置上还设置有滑槽,升降同步装置与报夹装置之间通过滑槽与导轨滑动配合。
10、进一步优选,所述驱动轮包括前驱动轮以及后驱动轮,前驱动轮以及后驱动轮分别设置于前机架以及后机架下方,前驱动轮与以及后机架上安装有定位销,定位销连接电机。
11、进一步优选,所述前机架上设置有铰接杆,辅助万向轮之间连接有连接杆,通过铰接杆将前机架和后机架进行卡合固定,辅助万向轮胎面采用聚氨酯材料,辅助万向轮与前驱动轮和后驱动轮形成三轮结构。
12、进一步优选,所述顶举装置底部设置有固定螺栓,前机架和后机架上设置有与固定螺栓相配合的固定螺母。
13、(三)有益效果
14、本实用新型研发了一套平库机器人,区别与传统的agv搬运系统;平库机器人的单次作业既可以完成整垛、整包作业任务,又可以完成零星作业任务,作业形式灵活;自动化程度更加优越,可搭载工业相机也能实现视觉拍照的功能,系统管理整个平库中的资产信息,可以对库区资产的堆叠、摆放按系统指定要求整理。
技术特征:
1.一种平库机器人,包括agv驱动小车(1),agv驱动小车包括驱动轮与机架,驱动轮设置于机架下方;其特征在于:agv驱动小车(1)上设置有顶举装置(2)、悬挂缓冲弹簧(5)、升降同步装置(3)以及报夹装置(4);顶举装置(2)设置于agv驱动小车(1)内部且顶举装置(2)与agv驱动小车(1)之间设置悬挂缓冲弹簧(5);agv驱动小车(1)外部一侧垂直设置有升降同步装置(3),升降同步装置(3)上固定设置报夹装置(4),agv驱动小车(1)上设置有电机,升降同步装置(3)以及报夹装置(4)与电机之间电路连接。
2.根据权利要求1所述的一种平库机器人,其特征在于:所述顶举装置(2)包括举顶平台(201)与步进电机(204),步进电机(204)两侧分别设置有丝杆升降装置(205),丝杆升降装置(205)与步进电机(204)之间连接有轴连器(202),举顶平台(201)与丝杆升降装置(205)之间设置有升降轴且升降轴延伸出举顶平台(201)上固定设置有定位锥(203);机架分为前机架(104)以及后机架(105),前机架(104)与后机架(105)的中轴线两侧分别布置辅助万向轮(103),机架下方两侧分别安装驱动轮。
3.根据权利要求1所述的一种平库机器人,其特征在于:所述升降同步装置(3)包括升降机架(306),升降机架(306)上设置有同步轴承(302),同步轴承(302)上套接同步带(301);升降机架(306)中间设置有导轨,导轨上设置若干定位孔(303),导轨上套接滑动固定块(304),导轨上下两端分别设置有同步带张紧装置(305)以及缓冲器(308),升降机架(306)末端设置有电源(307)。
4.根据权利要求1所述的一种平库机器人,其特征在于:所述报夹装置(4)包括报夹臂(401)与支座板,报夹臂(401)分别设置在支座板两侧形成“门”字形;支座板上设置有丝杆电机(403)、传感器(407)以及传感器支架(405),报夹臂(401)上安装有若干调整固定块(404),报夹臂(401)末端设置有报夹爪(402)。
5.根据权利要求4所述的一种平库机器人,其特征在于:所述报夹装置(4)上还设置有滑槽(406),升降同步装置(3)与报夹装置(4)之间通过滑槽(406)与导轨滑动配合。
6.根据权利要求1所述的一种平库机器人,其特征在于:所述驱动轮包括前驱动轮(101)以及后驱动轮(102),前驱动轮(101)以及后驱动轮(102)分别设置于前机架(104)以及后机架(105)下方,前驱动轮(101)与以及后机架(105)上安装有定位销,定位销连接电机。
7.根据权利要求2所述的一种平库机器人,其特征在于:所述前机架(104)上设置有铰接杆(107),辅助万向轮(103)之间连接有连接杆(108),通过铰接杆(107)将前机架(104)和后机架(105)进行卡合固定,辅助万向轮(103)胎面采用聚氨酯材料,辅助万向轮(103)与前驱动轮(101)和后驱动轮(102)形成三轮结构。
8.根据权利要求1所述的一种平库机器人,其特征在于:所述顶举装置(2)底部设置有固定螺栓(206),前机架(104)和后机架(105)上设置有与固定螺栓(206)相配合的固定螺母(106)。
技术总结
本技术公开了一种平库机器人,包括AGV驱动小车,AGV驱动小车包括驱动轮与机架,驱动轮设置于机架下方;AGV驱动小车上设置有顶举装置、悬挂缓冲弹簧、升降同步装置以及报夹装置;顶举装置设置于AGV驱动小车内部且顶举装置与AGV驱动小车之间设置悬挂缓冲弹簧;AGV驱动小车外部一侧垂直设置有升降同步装置,升降同步装置上固定设置报夹装置,AGV驱动小车上设置有电机,升降同步装置以及报夹装置与电机之间电路连接。本技术的优点在于区别与传统的AGV搬运系统;平库机器人的单次作业既可以完成整垛、整包作业任务,又可以完成零星作业任务,作业形式灵活。
技术研发人员:潘勇,杨恒,杨应春,李字华,许浩楠
受保护的技术使用者:云南卓沛科技有限公司
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!