一种三连杯裹包机器人的制作方法
本技术涉及食品包装,具体涉及一种三连杯裹包机器人。
背景技术:
1、本实用新型对于背景技术的描述属于与本实用新型相关的相关技术,仅仅是用于说明和便于理解本实用新型的内容,不应理解为申请人明确认为或推定申请人认为是本实用新型在首次提出申请的申请日的现有技术。
2、食品中的连杯是常规设置,这样不但可以将不同口味的产品组合出售,还可以配合各种促销活动等等。
3、通常三连杯的裹包机构都是将输送来的杯子直接裹包,默认输送来的就是要打包的杯子,这在需要打包同一种产品时问题不大,然而,有时需要打包不同的产品,如不同口味的奶茶,要求每个三连杯包括三种不同口味的奶茶,那么三种口味是有三道生产新输送过来,在分组送到裹包设备处时有时会发生混乱导致错误,而目前的三连杯裹包设备是直接进行错误打包的,导致市场上出现一些与宣传不符的产品,虽然产品质量没问题,但与宣传不一致则会引起顾客的不满,同时也影响了产品的体验。以往三连杯包装主要采用人工包装,效率低下。
技术实现思路
1、本实用新型实施例的目的是提供一种三连杯裹包机器人,通过识别不同杯子的信息来防止错误裹包。
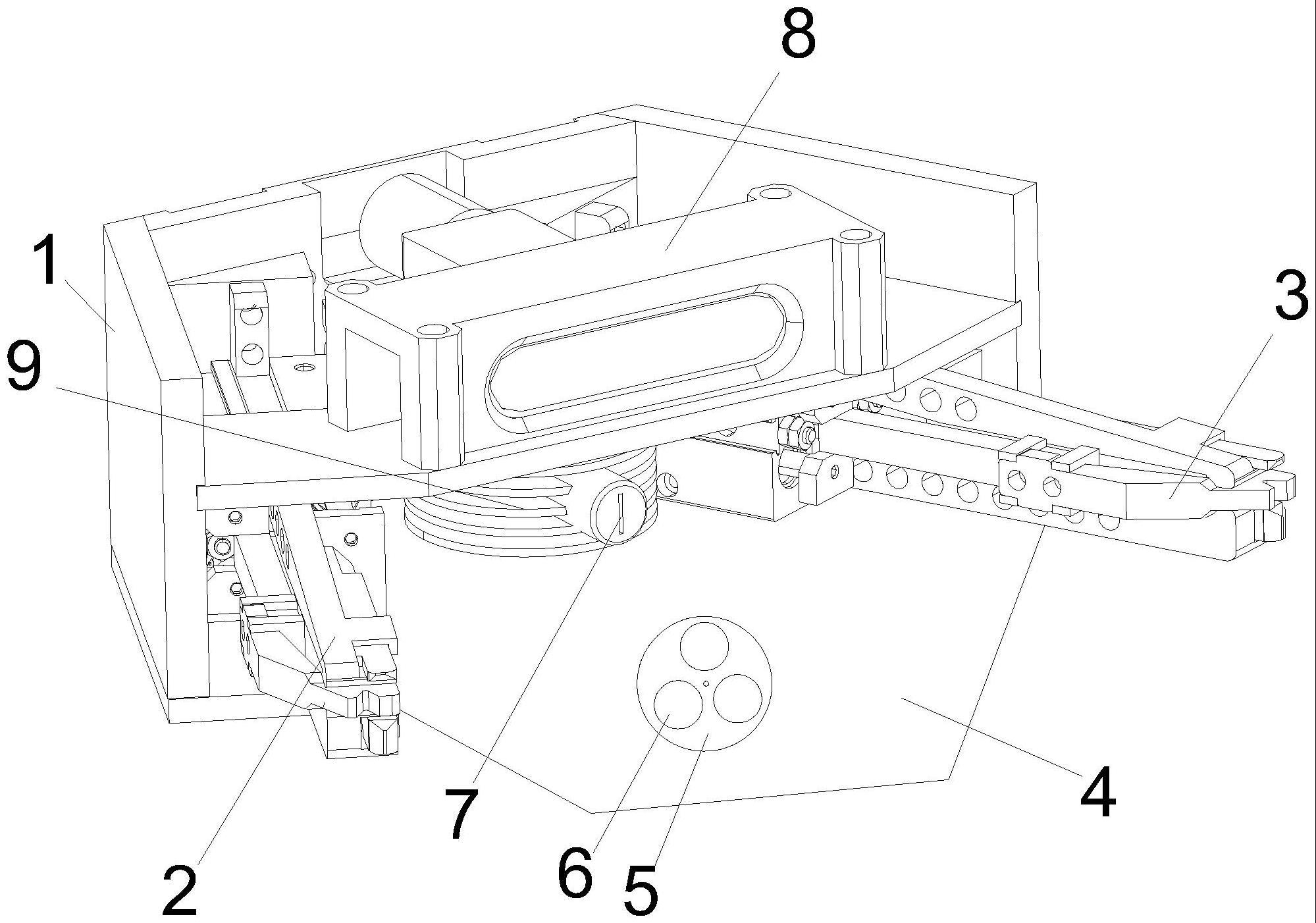
2、一种三连杯裹包机器人,包括:
3、机器人本体,所述的机器人本体包括两个侧板和一个底板,所述的底板上靠近两个侧板的位置分别设有第一夹爪和第二夹爪,所述的第一夹爪的末端设有刀片;
4、工作台,所述的工作台设置在第一夹爪和第二夹爪形成的工作区域中;
5、转盘,所述的转盘设置在工作台上位于所述的机器人本体区域外部,所述的转盘上设有三位槽;
6、裹包带,设置在所述的第一夹爪和第二夹爪之间,位于所述的机器人本体的内部;所述的裹包带可绕轴旋转;
7、刀片切割位,设置在所述的裹包带的旋转出口处;
8、扫描设备,设置在所述的机器人本体上方,用于扫描所述的转盘所在区域;
9、控制器,分别与所述的扫描设备、第一夹爪和第二夹爪信号连接。
10、进一步的,所述的扫描设备为二维码扫描仪。
11、进一步的,所述的两个侧板呈敞口型。
12、进一步的,还包括与所述的控制器信号连接的报警器。
13、借由上述方案,本实用新型至少具备如下有益效果:
14、本申请通过扫描设备扫描三个杯子的二维码信息,可以准确判断是否为要裹包的三连杯,有效防止错误打包。
15、本申请的设备通过识别不同杯子的信息来防止错误裹包,自动化程度高,大量节省了人力物力,降低了误包率。
16、本专利的机器人,能够一次性自动抓取三杯产品并自动将三杯产品裹包在一起。该机器人,抓取稳定、精准,裹包运行流畅,裹包效率高。
技术特征:
1.一种三连杯裹包机器人,其特征在于,包括:
2.根据权利要求1所述的三连杯裹包机器人,其特征在于,所述的扫描设备为二维码扫描仪。
3.根据权利要求1所述的三连杯裹包机器人,其特征在于,所述的两个侧板呈敞口型。
4.根据权利要求1所述的三连杯裹包机器人,其特征在于,还包括与所述的控制器信号连接的报警器。
技术总结
本技术涉及食品包装技术领域,公开了一种三连杯裹包机器人。包括:机器人本体,机器人本体包括两个侧板和一个底板,底板上靠近两个侧板的位置分别设有第一夹爪和第二夹爪,第一夹爪的末端设有刀片;工作台,工作台设置在第一夹爪和第二夹爪形成的工作区域中;转盘,转盘设置在工作台上位于机器人本体区域外部,转盘上设有三位槽;裹包带,设置在第一夹爪和第二夹爪之间,位于机器人本体的内部;裹包带可绕轴旋转;刀片切割位,设置在裹包带的旋转出口处;扫描设备,设置在机器人本体上方,用于扫描转盘所在区域;控制器。本申请的设备通过识别不同杯子的信息来防止错误裹包,自动化程度高,大量节省了人力物力,降低了误包率。
技术研发人员:朱圣飞,陈继君,沈家云,李忠涛
受保护的技术使用者:兰芳园食品有限公司
技术研发日:20230519
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!