一种货运仓储码垛机器人
本技术属于机器人运输,具体来说,特别涉及一种货运仓储码垛机器人。
背景技术:
1、随着科技的发展,人们的生活节奏也逐渐加快,许多企业都开始使用高效率的机器进行工作,而在搬运物品的时候通常会用到码垛机器人进行整理装车,码垛机器人是将装有物品的料袋、纸箱或是其它包装材料,排列码放在托盘或栈板上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存,可有效减少劳动力和降低劳动强度。
2、码垛机器人通常是利用夹持板对物体进行抓取,通过两个夹持板的开合,夹住物品;传统的码垛机器人夹持板只能对表面平整的物体进行抓取,面对表面不平整的物品,就需要更换不同的抓取组件来抓取物品,操作繁琐耗费时间,导致码垛机器人的搬运效率降低,传统的码垛机器人大部分都固在指定位置,不方便不同位置的码垛工作。
技术实现思路
1、针对相关技术中的问题,本实用新型提出一种货运仓储码垛机器人,以克服现有相关技术所存在的上述技术问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
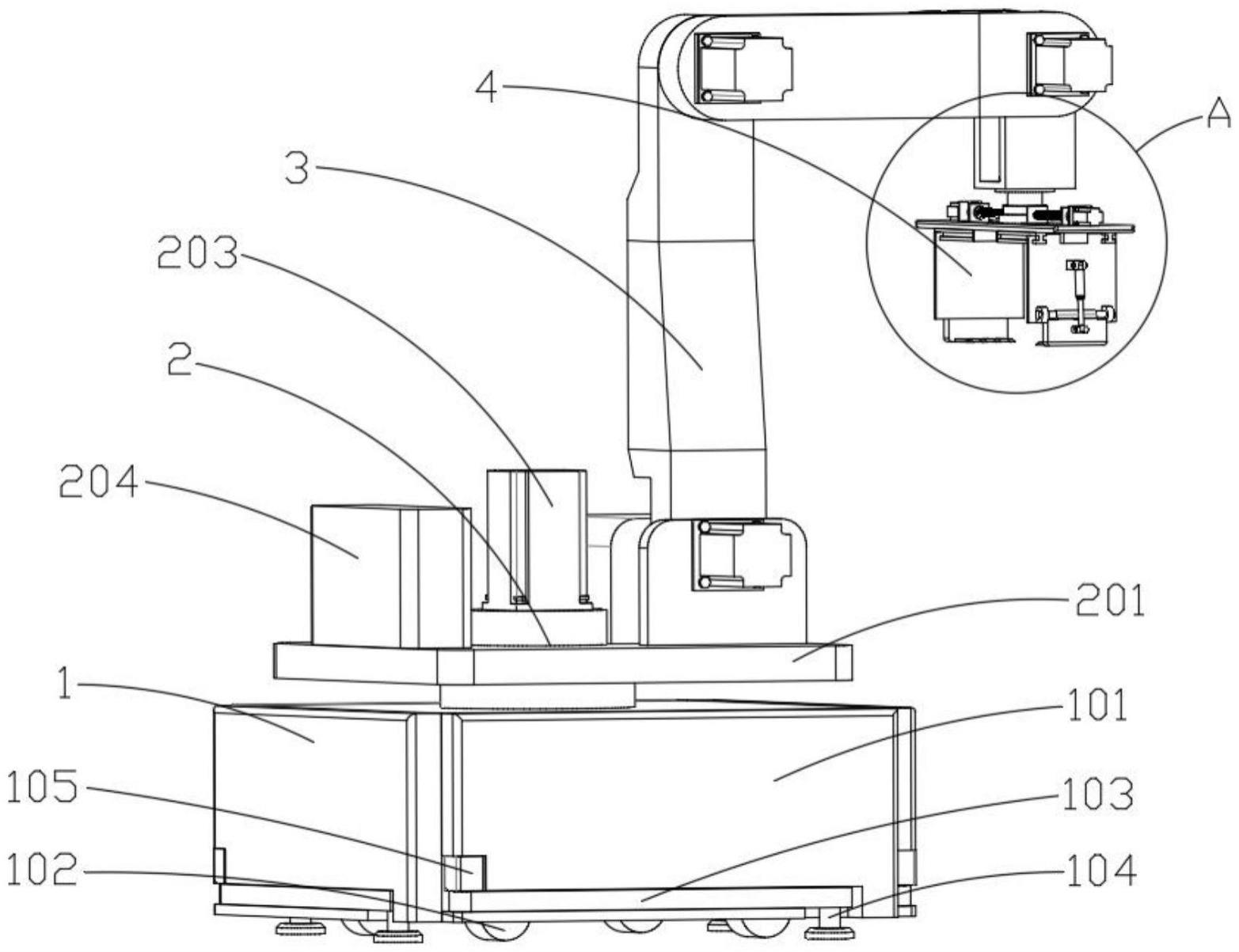
3、本实用新型为一种货运仓储码垛机器人,包括行走底盘、可转动平台、机械臂以及抓取组件;其特征在于:所述行走底盘上方设置有所述可转动平台,所述可转动平台包括安装板,所述安装板顶端靠近一端固定安装有所述机械臂,所述机械臂远离所述安装板的一端设置有所述抓取组件,所述抓取组件包括连接块、底板、导轨、夹持板以及抓手,所述底板顶端中部固定安装有所述连接块,所述底板底端靠近两侧均固定安装有若干所述导轨,所述底板底端靠近两侧设置有若干所述夹持板,且所述夹持板与所述导轨套接,所述夹持板远离所述连接块的一侧靠近底端活动安装有所述抓手,所述抓取组件包括气缸,当所述夹持板接触到物体时,所述伺服电机停止工作,此时,所述气缸驱动所述抓手闭合,对表面不平整的物体进行抓取,所述抓手的抓指之间相互交错,所述夹持板之间最小距离大于抓指长度约5%。
4、进一步地,所述行走底盘包括车体、行走轮、支撑杆、支撑脚以及支撑驱动电机,所述车体通过所述行走轮进行移动,所述支撑驱动电机驱动所述支撑杆转动,所述支撑杆一端在槽口内转动,另一端从槽口内移动出来,配合所述支撑脚对所述车体进行支撑。
5、进一步地,所述车体底端活动安装有若干所述行走轮,所述车体外壁靠近底端开设有若干槽口,且槽口内均设置有所述支撑杆与所述支撑驱动电机,所述车体槽口腔体一端设置有所述支撑杆,所述支撑杆一端活动安装在槽口腔体一端,所述支撑杆底端靠近另一端固定安装有所述支撑脚,且所述支撑脚靠近槽口腔体另一端,所述支撑杆顶端靠近一端设置有所述支撑驱动电机,且所述支撑驱动电机的转动轴与所述支撑杆固定连接,若干所述支撑驱动电机均固定安装于车体槽口内壁。
6、进一步地,所述车体顶端中部固定安装有旋转轴,所述旋转轴远离所述车体的一端设置有在所述安装板,所述安装板顶端中部固定安装有旋转驱动电机,所述旋转驱动电机转动轴穿过所述安装板与所述旋转轴固定连接,所述安装板顶端另一端的位置固定安装有配重件。
7、进一步地,所述抓取组件包括伺服电机以及滚珠丝杆,所述伺服电机驱动所述滚珠丝杆转动,所述滚珠丝杆驱动所述夹持板在所述导轨上运动,所述夹持板相向运动,对表面平整的物体进行夹持。
8、进一步地所述底板顶端靠近两端均固定安装有若干所述伺服电机,所述底板上方设置有若干所述滚珠丝杆,所述伺服电机转动轴固定连接有所述滚珠丝杆,所述滚珠丝杆上套设有所述夹持板。
9、进一步地,所述夹持板远离所述连接块的一侧固定安装有夹持板固定件,所述抓手远离所述连接块的一侧固定安装有抓手固定件,所述夹持板固定件活动安装有气缸,所述气缸远离所述夹持板固定件的一端与所述抓手固定件活动安装。
10、本实用新型具有以下有益效果:
11、通过使用本装置时,通过行走轮使车体移动至工作位置,支撑驱动电机驱动支撑杆从槽口内转动出来,并转动至设定位置,支撑脚接触地面,对车体进行支撑,旋转驱动电机驱动旋转轴转动,此时旋转轴被固定安装车体顶端,旋转轴相对与车体而言相对静止,此时旋转驱动电机以车体为参考,旋转驱动电机处于转动状态,使安装板转动,安装板转动将机械臂的移动至工作位置,机械臂工作,将抓取组件移动至工作位置,伺服电机驱动滚珠丝杆运动,滚珠丝杆带动夹持板在导轨上运动,夹持板之间相向运动,夹持板接触表面平整的物体,并对物体产生轻微的挤压后,伺服电机停止工作,对表面平整的物体进行夹持,面对表面不平整的物体,夹持板之间相向运动到与物体接触的位置,气缸驱动抓手之间闭合,对表面不平整的物体进行抓取,对物体完成抓取后,旋转驱动电机驱动旋转轴转动,将机械臂移动至码垛方向,机械臂转动,将抓取组件移动至设定位置,伺服电机驱动滚珠丝杆运动,滚珠丝杆带动夹持板之间在导轨上背向运动,将物体放置在码垛位置后,旋转驱动电机驱动旋转轴转动,将机械臂移动回原先工作位置,即可完成本装置使用,重复上述操作即可进行。面对表面平整的物体,抓取组件通过第一夹持板与第二夹持板对物体进行夹持,面对表面不平整的物体,抓取组件通过夹持板对物体进行夹持,面对表面不平整的物体,夹持板之间相向运动到与物体接触的位置,气缸驱动抓手之间闭合,对物体进行抓取,面对不同的物体,无需更换其他抓取组件,提升码垛机器人搬运效率;码垛机器人可通过行走轮移动车体,支撑杆与支撑脚对机器人进行支撑,防止机器人倾倒,能让机器人在不同位置进行码垛工作。
12、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种货运仓储码垛机器人,包括行走底盘(1)、可转动平台(2)、机械臂(3)以及抓取组件(4),其特征在于:所述行走底盘(1)上方设置有所述可转动平台(2),所述可转动平台(2)包括安装板(201),所述安装板(201)顶端靠近一端固定安装有所述机械臂(3),所述机械臂(3)远离所述安装板(201)的一端设置有所述抓取组件(4),所述抓取组件(4)包括连接块(401)、底板(402)、导轨(403)、夹持板(404)以及抓手(405),所述底板(402)顶端中部固定安装有所述连接块(401),且所述连接块(401)远离所述底板(402)的一端与所述机械臂(3)远离所述安装板(201)的一端固定安装,所述底板(402)底端靠近两侧均固定安装有若干所述导轨(403),所述底板(402)底端靠近两侧设置有若干所述夹持板(404),且所述夹持板(404)与所述导轨(403)套接,所述夹持板(404)远离所述连接块(401)的一侧靠近底端活动安装有所述抓手(405),所述抓取组件(4)包括气缸(408)和伺服电机(406),当所述夹持板(404)接触到表面不平整的物体时,所述伺服电机(406)停止工作,此时,所述气缸(408)驱动所述抓手(405)之间闭合,对表面不平整的物体进行抓取,所述抓手(405)的抓指之间相互交错,所述夹持板(404)之间最小距离大于抓指长度约10%。
2.根据权利要求1所述的一种货运仓储码垛机器人,其特征在于,所述行走底盘(1)包括车体(101)、行走轮(102)、支撑杆(103)、支撑脚(104)以及支撑驱动电机(105),所述车体(101)通过所述行走轮(102)进行移动,所述支撑驱动电机(105)驱动所述支撑杆(103)转动,所述支撑杆(103)一端在槽口内转动,另一端从槽口内移动出来,配合所述支撑脚(104)对所述车体(101)进行支撑。
3.根据权利要求2所述的一种货运仓储码垛机器人,其特征在于,所述车体(101)底端活动安装有若干所述行走轮(102),所述车体(101)外壁靠近底端开设有若干槽口,且槽口内均设置有所述支撑杆(103)与所述支撑驱动电机(105),所述车体(101)槽口腔体一端设置有所述支撑杆(103),所述支撑杆(103)一端活动安装在槽口腔体一端,所述支撑杆(103)底端靠近另一端固定安装有所述支撑脚(104),且所述支撑脚(104)靠近槽口腔体另一端,所述支撑杆(103)顶端靠近一端设置有所述支撑驱动电机(105),且所述支撑驱动电机(105)的转动轴与所述支撑杆(103)固定连接,若干所述支撑驱动电机(105)均固定安装于车体(101)槽口内壁。
4.根据权利要求2所述的一种货运仓储码垛机器人,其特征在于,所述车体(101)顶端中部固定安装有旋转轴(202),所述旋转轴(202)远离所述车体(101)的一端设置有在所述安装板(201),所述安装板(201)顶端中部固定安装有旋转驱动电机(203),所述旋转驱动电机(203)转动轴穿过所述安装板(201)与所述旋转轴(202)固定连接,所述安装板(201)顶端另一端的位置固定安装有配重件(204)。
5.根据权利要求1所述的一种货运仓储码垛机器人,其特征在于,所述抓取组件(4)包括伺服电机(406)以及滚珠丝杆(407),所述伺服电机(406)驱动所述滚珠丝杆(407)转动,所述滚珠丝杆(407)驱动所述夹持板(404)在所述导轨(403)上运动,所述夹持板(404)相向运动,对表面平整的物体进行夹持。
6.根据权利要求5所述的一种货运仓储码垛机器人,其特征在于,所述底板(402)顶端靠近两端均固定安装有若干所述伺服电机(406),所述底板(402)上方设置有若干所述滚珠丝杆(407),所述伺服电机(406)转动轴固定连接有所述滚珠丝杆(407),所述滚珠丝杆(407)上套设有所述夹持板(404)。
7.根据权利要求6所述的一种货运仓储码垛机器人,其特征在于,所述夹持板(404)远离所述连接块(401)的一侧固定安装有夹持板固定件(409),所述抓手(405)远离所述连接块(401)的一侧固定安装有抓手固定件(410),所述夹持板固定件(409)活动安装有气缸(408),所述气缸(408)远离所述夹持板固定件(409)的一端与所述抓手固定件(410)活动安装。
技术总结
本技术公开了一种货运仓储码垛机器人,涉及机器人运输技术领域。本技术包括行走底盘、可转动平台、机械臂以及抓取组件;行走底盘顶端设置有可转动平台,可转动平台顶部设置有机械臂,机械臂远离可转动平台的一端活动安装有抓取组件。面对表面平整的物体,抓取组件通过夹持板之间相向运动,对物体进行夹取,面对表面不平整的物体,夹持板之间相向运动到与物体接触的位置后,气缸驱动抓手之间闭合,对物体进行抓取,面对不同的物体,无需更换其他抓取组件,提升码垛机器人搬运效率。
技术研发人员:王自立,袁纬潞
受保护的技术使用者:安阳职业技术学院
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!