一种智能物流机器人的制作方法
本技术涉及机器人,具体为一种智能物流机器人。
背景技术:
1、物流原意为“实物分配”或“货物配送”,是供应链活动的一部分,是为了满足客户需要而对商品、服务消费以及相关信息从产地到消费地的高效、低成本流动和储存进行的规划、实施与控制的过程,分拣机器人是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣,用以提高货物分拣的效率。
2、专利文件cn214610188u公开了一种旋转关节智能物流分拣机器人,保护的权利“包括支撑柱和送料带,所述支撑柱上端安置有第一传送带,且第一传送带外侧安置有壳体,所述壳体外壁连接有升降块,且升降块外壁固定有连接臂,所述连接臂末端设置有第一电机,且第一电机上端连接有旋转臂,所述旋转臂末端安置有第二电机。该旋转关节智能物流分拣机器人,第一转运盘两端的夹板在吸盘吸附产品的同时可通过电动伸缩杆的带动对香烟盒进行限位夹持,由于夹板外壁设置的弹簧末端连接有海绵板,可有效保证夹持的烟盒不会发生形变受损,夹板的夹持配合吸盘的吸附力能够牢牢地对多个烟盒进行吸附抓取,使转运分拣过程更加稳定高效。”
3、但是上述公开文献中对于现有的智能物流分拣机器人在使用过程中,大都不易移动,位置不便调节的问题处理不善。
技术实现思路
1、本实用新型的目的在于提供一种智能物流机器人,以解决上述背景技术中提出的智能物流分拣机器人位置不便调节的技术问题。
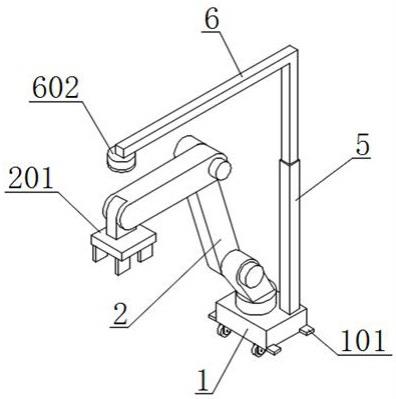
2、为实现上述目的,本实用新型提供如下技术方案:一种智能物流机器人,包括底座、机械臂、第一电机和滑片,所述底座的内部底壁安装有第一电机,所述第一电机的输出端安装有第一丝杠,所述第一丝杠的外壁套装有第一滑套,且第一滑套与第一丝杠相啮合,所述第一滑套的外壁安装有支架,所述支架的一端安装有支腿,且支腿相对底座伸缩,所述支腿的底端安装有万向轮,第一电机可以带动第一丝杠转动,第一丝杠可以带动第一滑套上下移动;
3、所述底座的顶部安装有机械臂,所述支腿的外壁安装有滑片,所述底座的顶部安装有底支柱,且底支柱位于机械臂的一侧,机械臂用于模拟人体臂对货物进行分拣。
4、优选的,所述底座的外壁安装有支脚,支脚可以增强底座的稳定性。
5、优选的,所述机械臂的一端安装有夹持机构,夹持机构可以对货物进行夹持。
6、优选的,所述滑片的顶部贯穿安装有滑杆,且滑片相对滑杆滑动。
7、优选的,所述底支柱的内部底壁安装有第二电机,第二电机的输出端安装有第二丝杠,第二丝杠的顶端安装有限位片,第二电机可以带动第二丝杠转动,第二丝杠可以带动第二滑套上下移动。
8、优选的,所述底支柱的顶部贯穿安装有l型支柱,且l型支柱相对底支柱伸缩,l型支柱的底端安装有第二滑套,且第二滑套与第二丝杠相啮合,l型支柱的顶端安装有视觉传感器,l型支柱可以对视觉传感器进行支撑,通过视觉传感器可以对货物进行识别分析。
9、优选的,所述l型支柱的外壁安装有滑块,底支柱的内壁安装有滑轨,且滑块相对滑轨滑动,滑块配合滑轨可以让l型支柱稳定上下移动。
10、与现有技术相比,本实用新型的有益效果是:
11、1.本实用新型通过安装有支脚可以增强底座的稳定性,第一电机可以带动第一丝杠转动,第一丝杠可以带动第一滑套上下移动,支架可以对支腿进行支撑,第一滑套通过支架可以带动支腿上下移动,滑片配合滑杆可以让支腿稳定上下移动,支腿可以带动万向轮相对底座进行伸缩,由此当需要移动分拣机器人时,让万向轮伸出底座,进而方便移动,实现便于移动智能物流机器人;
12、2.本实用新型通过安装有第二电机可以带动第二丝杠转动,第二丝杠可以带动第二滑套上下移动,第二滑套可以带动l型支柱相对底支柱伸缩,限位片用以防止第二滑套从第二丝杠上滑脱,滑块配合滑轨可以让l型支柱稳定上下移动,l型支柱可以对视觉传感器进行支撑,通过视觉传感器可以对货物进行识别分析,从而进行分拣,由此实现便于对视觉传感器的高度进行调节。
技术特征:
1.一种智能物流机器人,包括底座(1)、机械臂(2)、第一电机(3)和滑片(4),其特征在于:所述底座(1)的内部底壁安装有第一电机(3),所述第一电机(3)的输出端安装有第一丝杠(301),所述第一丝杠(301)的外壁套装有第一滑套(302),且第一滑套(302)与第一丝杠(301)相啮合,所述第一滑套(302)的外壁安装有支架(303),所述支架(303)的一端安装有支腿(304),且支腿(304)相对底座(1)伸缩,所述支腿(304)的底端安装有万向轮(305);
2.根据权利要求1所述的一种智能物流机器人,其特征在于:所述底座(1)的外壁安装有支脚(101)。
3.根据权利要求1所述的一种智能物流机器人,其特征在于:所述机械臂(2)的一端安装有夹持机构(201)。
4.根据权利要求1所述的一种智能物流机器人,其特征在于:所述滑片(4)的顶部贯穿安装有滑杆(401),且滑片(4)相对滑杆(401)滑动。
5.根据权利要求1所述的一种智能物流机器人,其特征在于:所述底支柱(5)的内部底壁安装有第二电机(501),第二电机(501)的输出端安装有第二丝杠(502),第二丝杠(502)的顶端安装有限位片(503)。
6.根据权利要求1所述的一种智能物流机器人,其特征在于:所述底支柱(5)的顶部贯穿安装有l型支柱(6),且l型支柱(6)相对底支柱(5)伸缩,l型支柱(6)的底端安装有第二滑套(601),且第二滑套(601)与第二丝杠(502)相啮合,l型支柱(6)的顶端安装有视觉传感器(602)。
7.根据权利要求6所述的一种智能物流机器人,其特征在于:所述l型支柱(6)的外壁安装有滑块(7),底支柱(5)的内壁安装有滑轨(701),且滑块(7)相对滑轨(701)滑动。
技术总结
本技术公开了一种智能物流机器人,包括底座、机械臂、第一电机和滑片,所述底座的内部底壁安装有第一电机,所述第一电机的输出端安装有第一丝杠,所述第一丝杠的外壁套装有第一滑套,所述支架的一端安装有支腿,且支腿相对底座伸缩,所述支腿的底端安装有万向轮。本技术通过安装有支脚可以增强底座的稳定性,第一电机可以带动第一丝杠转动,第一丝杠可以带动第一滑套上下移动,支架可以对支腿进行支撑,第一滑套通过支架可以带动支腿上下移动,滑片配合滑杆可以让支腿稳定上下移动,支腿可以带动万向轮相对底座进行伸缩,由此当需要移动分拣机器人时,让万向轮伸出底座,进而方便移动,实现便于移动智能物流机器人。
技术研发人员:田膨源,田晨中,刘海霞,刘玉梅,王文静
受保护的技术使用者:中晨田润实业有限公司
技术研发日:20230523
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!