一种全自动码垛机的制作方法
本技术涉及码垛机,具体为一种全自动码垛机。
背景技术:
1、码垛机是将已装入容器的纸箱,按一定排列码放在托盘、栈板(木质、塑胶)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存,本设备采用plc+触摸屏控制,实现智能化操作管理,简便、易掌握,可大大地减少劳动力和降低劳动强度,码垛机是输送机输送来的料袋、纸箱或是其它包装材料按照客户工艺要求的工作方式自动堆叠成垛,并将成垛的物料进行输送的设备。
2、现有技术中,公开号为“cn104386503a”的一种全自动垛码机,所述垛码机包括垛码机本体,设置在垛码机本体下面的移动部件,所述垛码机还包括升降装置和夹紧装置,所述夹紧装置设置在升降装置的下面,相对于现有技术,本发明的有益效果如下:)、整个装置结构设计巧妙,拆卸维修方便;)该技术方案实现了全自动垛码操作,大大提高了生产效率、保证产品质量、改善了劳动条件;)该技术方案把设备按工件的加工工序顺序依次排列,用自动输送机联成一个整体,并用plc控制系统将各个部分的动作组合起来,使其按规定的动作协调工作,全自动加工流水线及垛码仓库的推出,可缓解企业对人力劳动的需要,降低人力劳动成本的支出。
3、但现有技术仍存在较大不足,如:
4、尽管现有技术和上述装置中,能够实现对货物的码垛,但现有技术中的码垛机啊大多是利用吸盘或夹爪来对货物进行抓取,这样的方式对于规则和表面平整的货物来说,抓取是很方便的,但是对于异形的货物,如锥形桶,上述方式就不再适合对锥形桶进行抓取;
5、尽管现有技术中也有能够对锥形桶抓取的装置,但现有技术中都是对锥形桶的外壁进行抓取,在移动锥形桶时抓取并不牢固,虽然能够通过增加抓取力的方式实现抓取牢固的效果,但抓取力如果过大,则会造成锥形桶变形。
技术实现思路
1、本实用新型的目的在于提供一种全自动码垛机,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
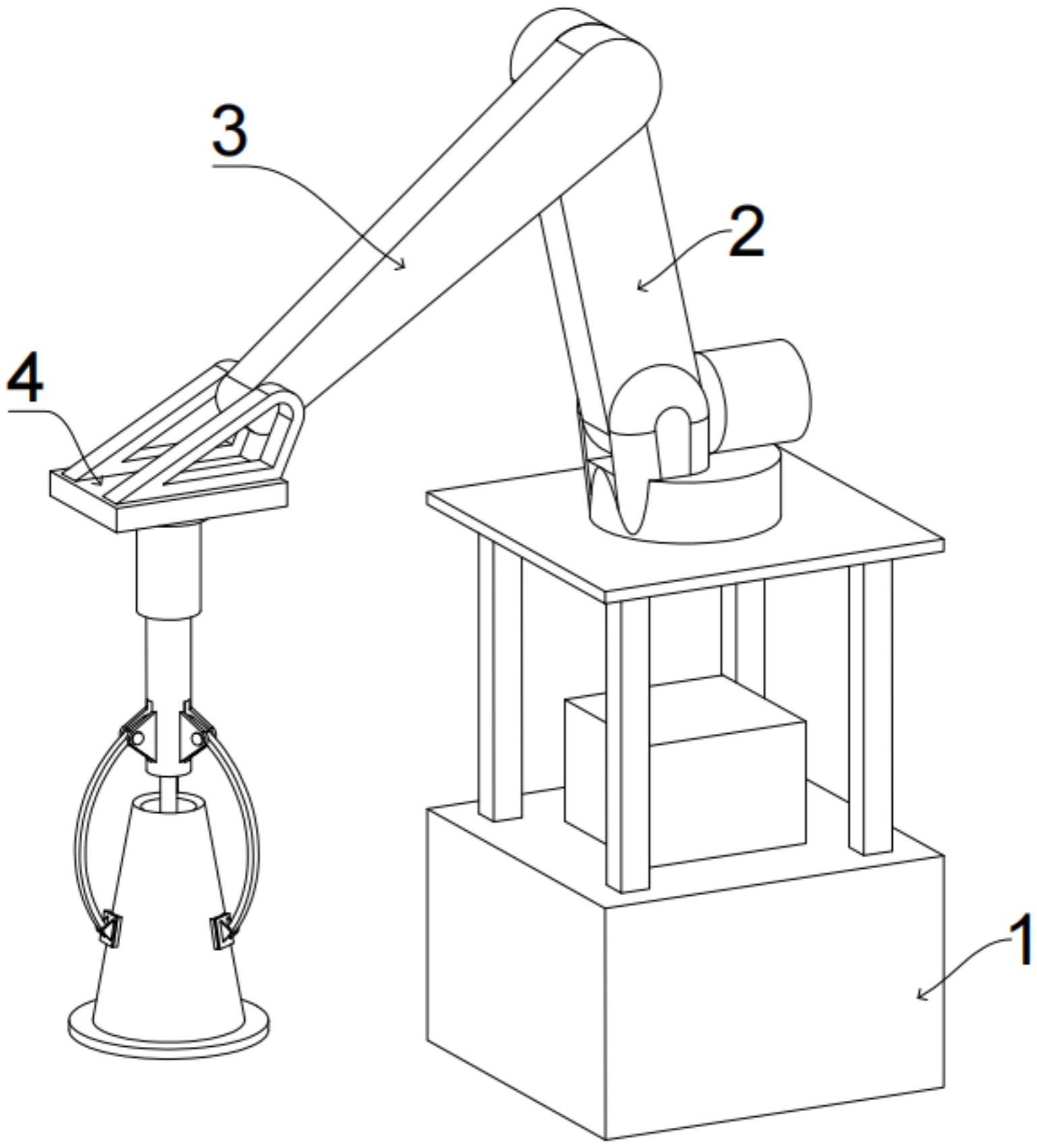
3、一种全自动码垛机,包括底座,所述底座上固定设置有控制箱,所述底座上固定设置有转台,所述转台上固定设置有第一机械臂,所述第一机械臂上转动设置有第二机械臂,所述第二机械臂上转动设置有第三机械臂,所述第三机械臂上固定设置有转向机,所述转向机上固定设置有用于抓取锥形桶外壁的抓取装置。
4、优选的,所述抓取装置包括固定设置在转向机上的伸缩缸,所述伸缩缸包括为固定端和活动端,所述伸缩缸的活动端上固定设置有环状齿轮,所述伸缩缸的固定端上固定设置有第一套筒,所述环状齿轮和伸缩缸的活动端活动设置在第一套筒中,所述第一套筒上转动设置有若干不完全齿轮,所述不完全齿轮与环状齿轮啮合,若干所述不完全齿轮上方固定设置有用于抓取锥形桶的抓杆。
5、优选的,所述抓杆的一端转动设置有压板,所述压板设置在远离不完全齿轮的一端。
6、优选的,所述压板上固定设置有第一摩擦垫,所述第一摩擦垫上设置有与锥形筒外壁弧度一致的凹弧面。
7、优选的,所述第一套筒的一端固定设置有第二套筒,所述第二套筒设置在远离伸缩缸的固定端,所述环形齿轮的一端固定设置有活动杆,所述活动杆设置在第二套筒中,所述活动杆设置在远离伸缩缸的活动端的一侧;
8、所述活动杆的一端转动设置有若干压杆,所述第二套筒上转动设置有若干连杆,所述压杆与连杆转动连接。
9、优选的,所述压杆的一端转动设置有若干压块。
10、优选的,所述压块上固定设置有若干第二摩擦垫,所述第二摩擦垫上设置有与锥形桶内壁弧度一致的凸弧面。
11、优选的,所述抓杆的数量至少为三个。
12、优选的,所述抓杆的数量与压杆的数量一致。
13、与现有技术相比,本实用新型的有益效果是:
14、1.通过抓取装置的设置,实现对锥形桶的抓取,弥补了现有技术中,机械臂和机械爪无法对锥形桶的抓取,提高了工作效率,降低了劳动强度,结构简单且成本低廉;
15、2.通过环状齿轮与不完全齿轮的设置,以齿轮传动的方式实现了抓杆的抓取动作,运动精准,故障率低,制造加工成本低,而且齿轮传动相较于以往的连杆传动,能够实现更为精准的抓取;
16、3.通过压杆等组件的设置,在抓取装置对锥形桶的外壁进行抓取时,压杆等组件会在锥形桶的内部,压紧锥形桶的内壁,从而防止锥形桶在抓取移动的过程中掉落。
17、本实用新型在使用的过程中,第三机械臂移动到待抓取的锥形桶上方,伸缩缸的活动端顶出,抓杆张开,压杆收缩,第二套筒伸入锥形桶的内部,待到达指定位置后,伸缩缸的活动端收缩,此时抓杆闭合,压紧锥形桶的外壁,压杆张开,压紧锥形桶的内壁,实现更好地抓取效果。
技术特征:
1.一种全自动码垛机,包括底座(1),所述底座(1)上设置有第一机械臂(2),所述第一机械臂(2)上转动设置有第二机械臂(3),所述第二机械臂(3)上转动设置有第三机械臂(4),其特征在于:所述第三机械臂(4)上固定设置有转向机(5),所述转向机(5)上固定设置有用于抓取锥形桶外壁的抓取装置。
2.根据权利要求1所述的一种全自动码垛机,其特征在于:所述抓取装置包括固定设置在转向机(5)上的伸缩缸(6),所述伸缩缸(6)包括为固定端(7)和活动端(8),所述伸缩缸(6)的活动端(8)上固定设置有环状齿轮(9),所述伸缩缸(6)的固定端(7)上固定设置有第一套筒(10),所述环状齿轮(9)和伸缩缸(6)的活动端(8)活动设置在第一套筒(10)中,所述第一套筒(10)上转动设置有若干不完全齿轮(11),所述不完全齿轮(11)与环状齿轮(9)啮合,若干所述不完全齿轮(11)上方固定设置有用于抓取锥形桶的抓杆(12)。
3.根据权利要求2所述的一种全自动码垛机,其特征在于:所述抓杆(12)的一端转动设置有压板(13),所述压板(13)设置在远离不完全齿轮(11)的一端。
4.根据权利要求3所述的一种全自动码垛机,其特征在于:所述压板(13)上固定设置有第一摩擦垫(14),所述第一摩擦垫(14)上设置有与锥形筒外壁弧度一致的凹弧面(15)。
5.根据权利要求2所述的一种全自动码垛机,其特征在于:所述第一套筒(10)的一端固定设置有第二套筒(16),所述第二套筒(16)设置在远离伸缩缸(6)的固定端(7),所述环状齿轮(9)的一端固定设置有活动杆(17),所述活动杆(17)设置在第二套筒(16)中,所述活动杆(17)设置在远离伸缩缸(6)的活动端(8)的一侧;
6.根据权利要求5所述的一种全自动码垛机,其特征在于:所述压杆(18)的一端转动设置有若干压块(20)。
7.根据权利要求6所述的一种全自动码垛机,其特征在于:所述压块(20)上固定设置有若干第二摩擦垫(21),所述第二摩擦垫(21)上设置有与锥形桶内壁弧度一致的凸弧面(22)。
8.根据权利要求2所述的一种全自动码垛机,其特征在于:所述抓杆(12)的数量至少为三个。
9.根据权利要求5所述的一种全自动码垛机,其特征在于:所述抓杆(12)的数量与压杆(18)的数量一致。
技术总结
本技术公开了一种全自动码垛机,包括底座,所述底座上固定设置有控制箱,所述底座上固定设置有转台,所述转台上固定设置有第一机械臂,所述第一机械臂上转动设置有第二机械臂,所述第二机械臂上转动设置有第三机械臂,所述第三机械臂上固定设置有转向机,所述转向机上固定设置有用于抓取锥形桶外壁的抓取装置。本技术在使用的过程中,第三机械臂移动到待抓取的锥形桶上方,伸缩缸的活动端顶出,抓杆张开,压杆收缩,第二套筒伸入锥形桶的内部,待到达指定位置后,伸缩缸的活动端收缩,此时抓杆闭合,压紧锥形桶的外壁,压杆张开,压紧锥形桶的内壁,实现更好地抓取效果。
技术研发人员:洪志浩,周俊强,洪飞
受保护的技术使用者:扬州市天洪机械有限公司
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!